#include "stm32f10x.h"
#include "delay.h"
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
u16 Ppm;
/*************************************************
函数: void RCC_Configuration(void)
功能: 配置系统时钟
参数: 无
返回: 无
**************************************************/
void RCC_Configuration(void)
{
ErrorStatus HSEStartUpStatus; //定义外部高速晶体启动状态枚举变量
RCC_DeInit(); //复位RCC外部设备寄存器到默认值
RCC_HSEConfig(RCC_HSE_ON); //打开外部高速晶振
HSEStartUpStatus = RCC_WaitForHSEStartUp(); //等待外部高速时钟准备好
if(HSEStartUpStatus == SUCCESS) //外部高速时钟已经准别好
{
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); //开启FLASH预读缓冲功能,加速FLASH的读取。所有程序中必须的用法.位置:RCC初始化子函数里面,时钟起振之后
FLASH_SetLatency(FLASH_Latency_2); //flash操作的延时
RCC_HCLKConfig(RCC_SYSCLK_Div1); //配置AHB(HCLK)时钟等于==SYSCLK
RCC_PCLK2Config(RCC_HCLK_Div1); //配置APB2(PCLK2)钟==AHB时钟
RCC_PCLK1Config(RCC_HCLK_Div2); //配置APB1(PCLK1)钟==AHB1/2时钟
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9); //配置PLL时钟 == 外部高速晶体时钟 * 9 = 72MHz
RCC_PLLCmd(ENABLE); //使能PLL时钟
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET) //等待PLL时钟就绪
{
}
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK); //配置系统时钟 = PLL时钟
while(RCC_GetSYSCLKSource() != 0x08) //检查PLL时钟是否作为系统时钟
{
}
}
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB , ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC | RCC_APB2Periph_GPIOD , ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO , ENABLE);
}
/*******************************************************************************
* Function Name : GPIO_Configuration
* Description : Configure the TIM3 Pins.
* Input : None
* Output : None
* Return : None
*******************************************************************************/
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
//RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB , ENABLE); //使能GPIOb外设模块时钟使能
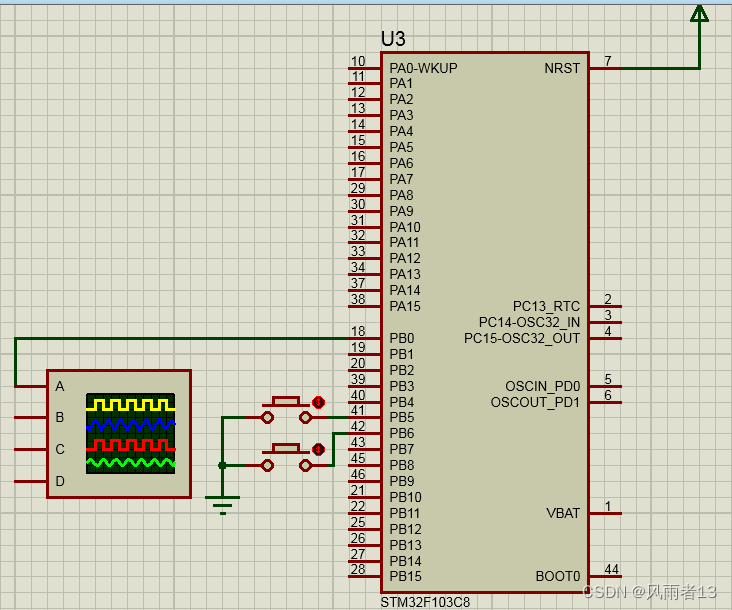
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1; //PB0 PB1输出PWM
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// PB2 / BOOT1在默认状态下是低电平。如果做输入,老是会自动变低 !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6; //PB1,PB2是按键输入,PB1,加油门。PB2,减油门
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//GPIO_PinRemapConfig(GPIO_Remap_SWJ_Disable, ENABLE); // 改变指定管脚的映射 GPIO_Remap_SWJ_Disable SWJ 完全禁用(JTAG+SW-DP)
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable , ENABLE); // 改变指定管脚的映射 GPIO_Remap_SWJ_JTAGDisable ,JTAG-DP 禁用 + SW-DP 使能
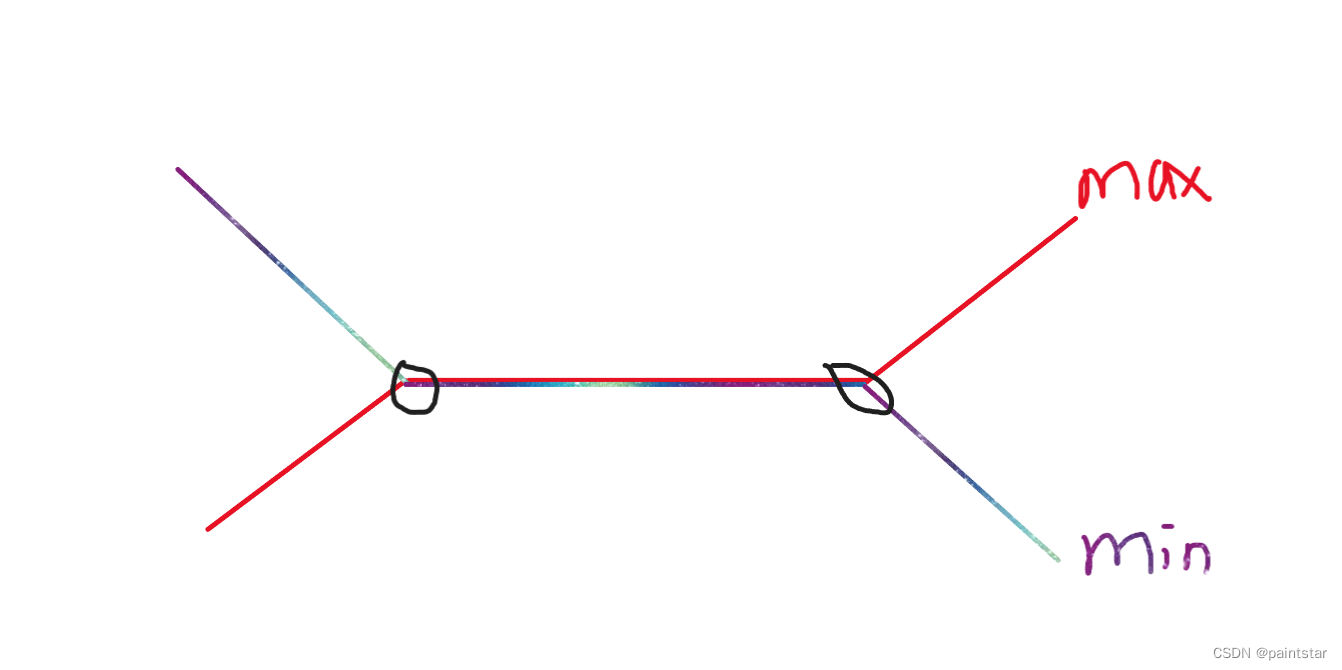
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3 | GPIO_Pin_4 ; //PB3,PB4是led。正极接3.3v。PB3,油门最大时亮。PB4,油门最小的时候亮
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
void PWM3_Configuration(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
//分频25。PWM频率=72000000/(57600*25)=50hz
/* ---------------------------------------------------------------
TIM3CLK 即PCLK1=36MHz
TIM3 Configuration: generate 1 PWM signals :
TIM3CLK = 36 MHz, Prescaler = 0x0, TIM3 counter clock = 36 MHz
TIM3 ARR Register = 900 => TIM3 Frequency = TIM3 counter clock/(ARR + 1)
TIM3 Frequency = 36 KHz.
TIM3 Channel2 duty cycle = (TIM3_CCR2/ TIM3_ARR)* 100
TIM3CLK = 36 MHz, Prescaler = 0, TIM3 counter clock = 36MHz
--------------------------------------------------------------- */
/* Time base configuration */
TIM_TimeBaseStructure.TIM_Period = 57600; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 2880000/57600=50【频率为50HZ】
TIM_TimeBaseStructure.TIM_Prescaler =25; //设置用来作为TIMx时钟频率除数的预分频值 72000000/25=2880000=2.88MHz
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
/* Output Compare Active Mode configuration: Channel1 */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
/******************************************************************************************
110:PWM模式1- 在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为有效电平,否则为
无效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为无效电平(OC1REF=0),否
则为有效电平(OC1REF=1)。
111:PWM模式2- 在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为无效电平,否则为
有效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为有效电平,否则为无效电平。
注1:一旦LOCK级别设为3(TIMx_BDTR寄存器中的LOCK位)并且CC1S=’00’(该通道配置成输出)则该位不能被修改。
注2:在PWM模式1或PWM模式2中,只有当比较结果改变了或在输出比较模式中从冻结模式切换到PWM模式时,OC1REF电平才改变。
【也许有效电平就是指的是高电平】
*******************************************************************************************/
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC3Init(TIM3, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIMx在CCR3上的预装载寄存器
TIM_OC4Init(TIM3, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIMx在CCR3上的预装载寄存器
TIM_ARRPreloadConfig(TIM3, ENABLE); //使能TIMx在ARR上的预装载寄存器
/* TIM3 enable counter */
TIM_Cmd(TIM3, ENABLE); //使能TIMx外设
}
void set_speed(u16 m1,u16 m2)
{
TIM_SetCompare3(TIM3,m1);
TIM_SetCompare4(TIM3,m2);
}
void led()
{
if(Ppm==52186)
GPIO_ResetBits(GPIOB,GPIO_Pin_3);
else if(Ppm==55008)
GPIO_ResetBits(GPIOB,GPIO_Pin_4);
else
{
GPIO_SetBits(GPIOB,GPIO_Pin_3);
GPIO_SetBits(GPIOB,GPIO_Pin_4);
}
}
/*************************************************
函数: int main(void)
功能: main主函数
参数: 无
返回: 无
**************************************************/
int main(void)
{
u8 flag=0;
Ppm=55008;
RCC_Configuration();
GPIO_Configuration();
PWM3_Configuration();
set_speed(Ppm,Ppm);
delay_init(72);
GPIO_SetBits(GPIOB, GPIO_Pin_3 | GPIO_Pin_4);//关闭指示灯
while(1)
{
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_5)==Bit_RESET&&Ppm>54186) //52186
{
Ppm--;
flag=1;
}
else if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_6)==Bit_RESET&&Ppm<55008)
{
Ppm++;
flag=1;
}
else flag=0;
led();
if(flag)
set_speed(Ppm,Ppm);
/*****************************************************
void TIM_SetCompare3(TIM_TypeDef* TIMx, uint16_t Compare3)
{
assert_param(IS_TIM_LIST3_PERIPH(TIMx));
TIMx->CCR3 = Compare3;
}
也就是设置TIM3的第三通道的低电平的值(定时器模式:TIM脉冲宽度调制模式2)
*****************************************************/
delay_ms(10);
}
}