随机采样,网格采样,均匀采样,集合采样。
网格采样:用规则的网格对点进行采样,不能精确的控制采样点的数量
均匀采样:均匀的采样点云中的点,由于其鲁棒性(系统的健壮性)而更受欢迎
点云降采样方法的原理是将三维空间网格化,也被称为体素化。
FPS(最远点采样方法):迭代选取最远的点
RS(随机采样):随机降采样均匀地从输入的 N 个点中选择 K 个点,每个点具有相同的被选中的概率。其计算量与输入点云的总点数无关,只与降采样后的点数 K 有关。
边缘采样方法(APES)
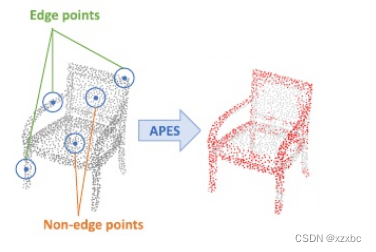
基于注意力的点云边缘采样方法:使用注意力机制来计算相关图和采样边缘点,这些边远点的属性在这些相关图中得到反应。
基于邻点注意力计算每个点与邻点之间的相关映射,提出了基于局部的点云边缘采样
基于点对点注意力计算所有点之间的关联映射,提出了基于全局的点云边缘采样
Canny边缘检测器有效性的关键是如何定义边缘 像素
强度梯度较大的像素被定义为边缘像素(和邻居比较)
N2P注意层(基于邻居到点)
对于许多点云来说,点坐标是唯一可用的特征
注意力机制可以做为每个patch内点特征之间的相关性度量
上采样:放大图像,图像插值,放大原图像,可以显示在更高分辨率显示设备上
下采样(降采样):缩小图像 ,目的:使图像符合显示区域的大小,形成缩略图
基于局部的APES更严格的关注边缘点,而基于全局的APES忽略一些边缘点,并更多地利用靠近边缘的其他非边缘点。


局部APES 全局APES
全局的APES丢弃了一些椅子的腿点,为座椅边缘做了更厚的点。
基于全局的APES通过减少对不属于边缘但全局更重要的点的采样来追求更好地性能。
嵌入维数:数据集能够完全嵌入且不损失信息的欧式空间的维数。
(嵌入层)降维
我们把一个A中的12个元素的矩阵变成C中6个元素的矩阵,直观上,大小是不是缩小了一半?Embedding层,在某种程度上,就是用来降维的,降维的原理就是矩阵乘法。
我们提出的方法的一个优 点是,我们可以用它采样任何想要的点数。
连续采样原始点云到四分之一(N→N/2→
N/4)和直接采样到四分之一(N→N/4)的定性比较结果。
我们观察到采样的结果大多是相似的。除了少数通过 连续采样可以更好地捕获的极端边缘点。
与原始点云相比,边样点采样改变了数据分布,特别是使用大的下采样率时,先试用FPS将输入点云采样到2M大小,然后使用APES方法将其采样到所需的大小M。






![[MySQL]基础篇](https://img-blog.csdnimg.cn/d1197afd255c428ca50f4f4df6357e79.png)