文章目录
- 前言
- RPN部分的代码
- 1. loss函数(two_stage.py)
- 1.1 loss_and_predict函数(base_dense_head.py)
- 1.1.1 loss_by_feat函数(fcos_head.py)
- 1.1.1.1 get_targets函数
- 1.1.2 predict_by_feat函数(base_dense_head.py)
- 1.1.2.1 _predict_by_feat_single函数(base_dense_head.py)
- 1.1.2.2 _bbox_post_process函数(base_dense_head.py)
前言
因为之前一直在搞DOTA数据集的旋转框检测,所以一直在用mmrotate作为主要工具。现在回来重新搞mmdetection框架发现有了不小的变化,出了3.x版本的新内容。相比于之前的版本变化比较大,因此正好做一个代码解读与之前发布的2.x版本进行对照。
新版本最让我惊喜的是可以将单阶段检测器作为 RPN进行两阶段的检测,官方文档如下
https://mmdetection.readthedocs.io/zh_CN/latest/user_guides/single_stage_as_rpn.html
按照官方文档的要求我们将Fcos作为RPN的提取网络,为ROI提取proposal,具体配置文件如下
_base_ = [
'../_base_/models/faster-rcnn_r50_fpn.py',
'../_base_/datasets/coco_detection.py',
'../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
]
model = dict(
# 从 configs/fcos/fcos_r50-caffe_fpn_gn-head_1x_coco.py 复制
neck=dict(
start_level=1,
add_extra_convs='on_output', # 使用 P5
relu_before_extra_convs=True),
rpn_head=dict(
_delete_=True, # 忽略未使用的旧设置
type='FCOSHead',
num_classes=1, # 对于 rpn, num_classes = 1,如果 num_classes > 1,它将在 TwoStageDetector 中自动设置为1
in_channels=256,
stacked_convs=4,
feat_channels=256,
strides=[8, 16, 32, 64, 128],
loss_cls=dict(
type='FocalLoss',
use_sigmoid=True,
gamma=2.0,
alpha=0.25,
loss_weight=1.0),
loss_bbox=dict(type='IoULoss', loss_weight=1.0),
loss_centerness=dict(
type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0)),
roi_head=dict( # featmap_strides 的更新取决于于颈部的步伐
bbox_roi_extractor=dict(featmap_strides=[8, 16, 32, 64, 128])))
# 学习率
param_scheduler = [
dict(
type='LinearLR', start_factor=0.001, by_epoch=False, begin=0,
end=1000), # 慢慢增加 lr,否则损失变成 NAN
dict(
type='MultiStepLR',
begin=0,
end=12,
by_epoch=True,
milestones=[8, 11],
gamma=0.1)
]
和之前2.x版本的代码分析一样,跳过Resnet和FPN的部分,我们直接从RPN开始
RPN部分的代码
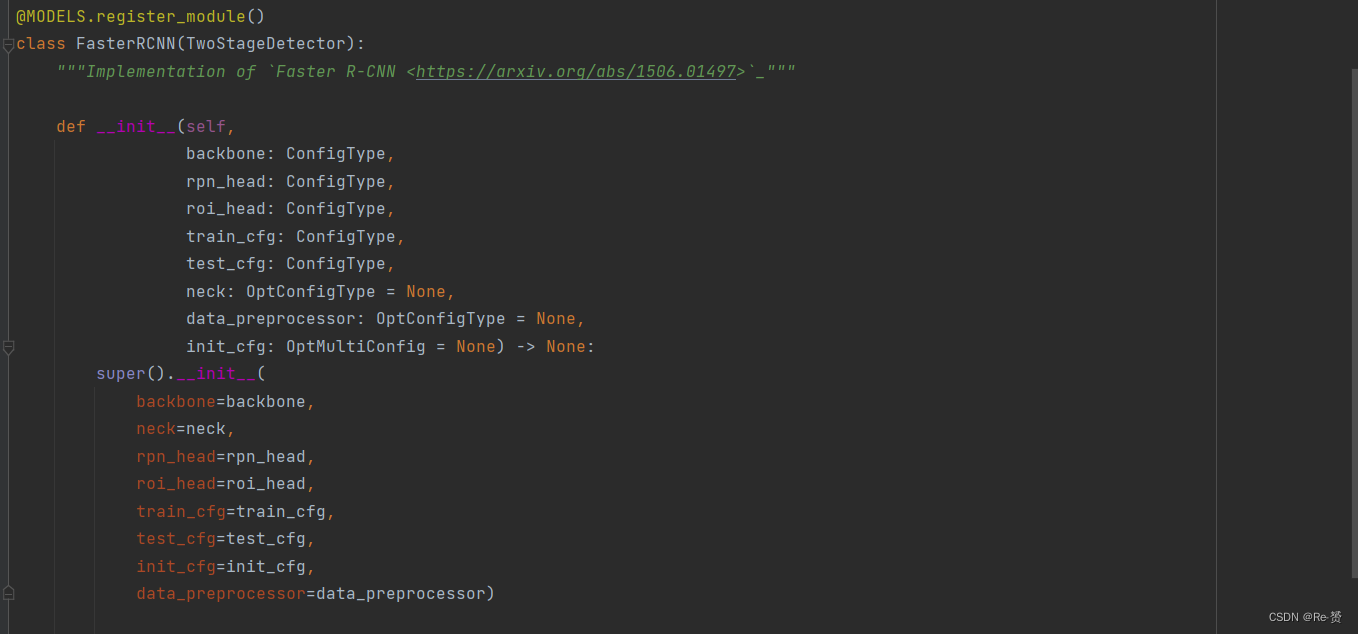
我们首先找到FasterRCNN这主类,可以看到继承了TwoStageDetector,所以我们接下来的重点是TwoStageDetector这个类
1. loss函数(two_stage.py)
不知道为什么3.x版本的two_stage函数没有了forward函数反而多了几个loss,predict函数。因为不知道运行顺序所以直接每一个类都打上了断点,最后发现是进入了loss函数里。
def loss(self, batch_inputs: Tensor,
batch_data_samples: SampleList) -> dict:
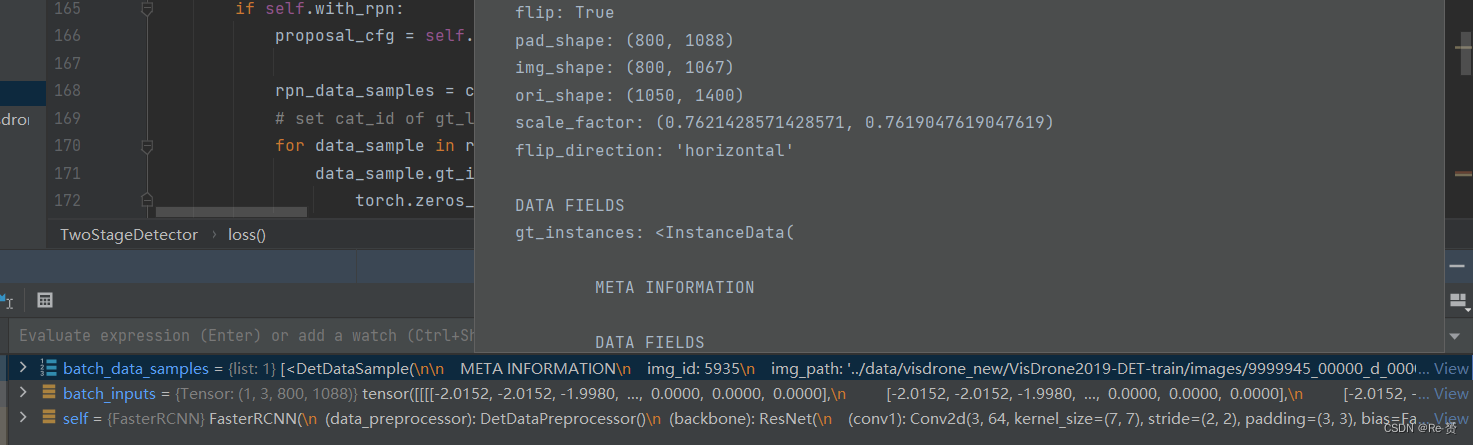
x = self.extract_feat(batch_inputs)
其中extract_feat的内容是
x = self.backbone(batch_inputs)
if self.with_neck:
x = self.neck(x)
return x

losses = dict()
if self.with_rpn:
proposal_cfg = self.train_cfg.get('rpn_proposal',
self.test_cfg.rpn)
rpn_data_samples = copy.deepcopy(batch_data_samples)

for data_sample in rpn_data_samples:
data_sample.gt_instances.labels = \
torch.zeros_like(data_sample.gt_instances.labels)
将每个 data_sample 中的目标实例的标签信息都设置为零,因为作为rpn网络只要进行二分类任务
rpn_losses, rpn_results_list = self.rpn_head.loss_and_predict(
x, rpn_data_samples, proposal_cfg=proposal_cfg) 详见1.1.1
计算 RPN 模型的损失并生成建议框的预测结果

keys = rpn_losses.keys()
for key in list(keys):
if 'loss' in key and 'rpn' not in key:
rpn_losses[f'rpn_{key}'] = rpn_losses.pop(key)
losses.update(rpn_losses)

roi_losses = self.roi_head.loss(x, rpn_results_list,
batch_data_samples)
losses.update(roi_losses)

1.1 loss_and_predict函数(base_dense_head.py)
def loss_and_predict(
self,
x: Tuple[Tensor],
batch_data_samples: SampleList,
proposal_cfg: Optional[ConfigDict] = None
) -> Tuple[dict, InstanceList]:
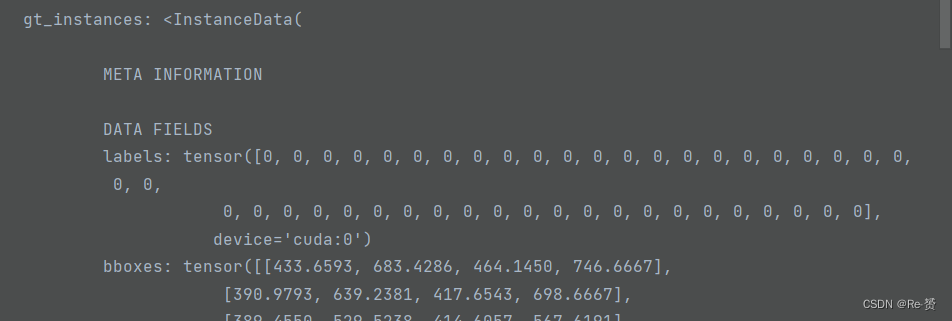
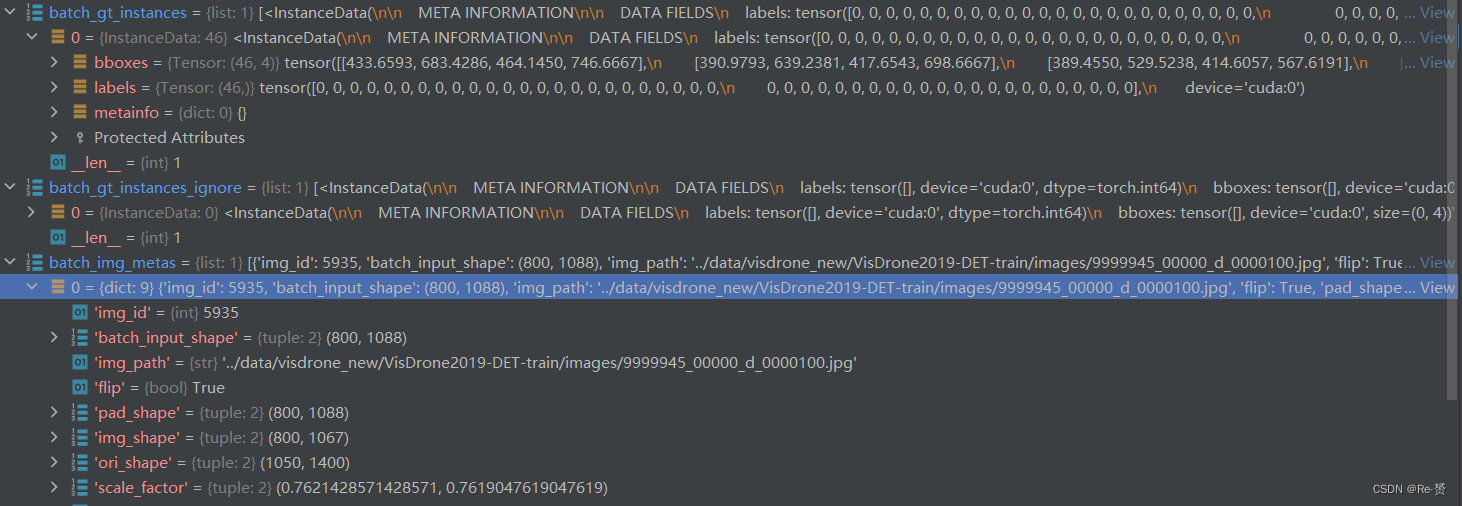
outputs = unpack_gt_instances(batch_data_samples)
(batch_gt_instances, batch_gt_instances_ignore,
batch_img_metas) = outputs
将批量数据中的目标实例信息和图像元信息提取出来,以便后续的处理和分析

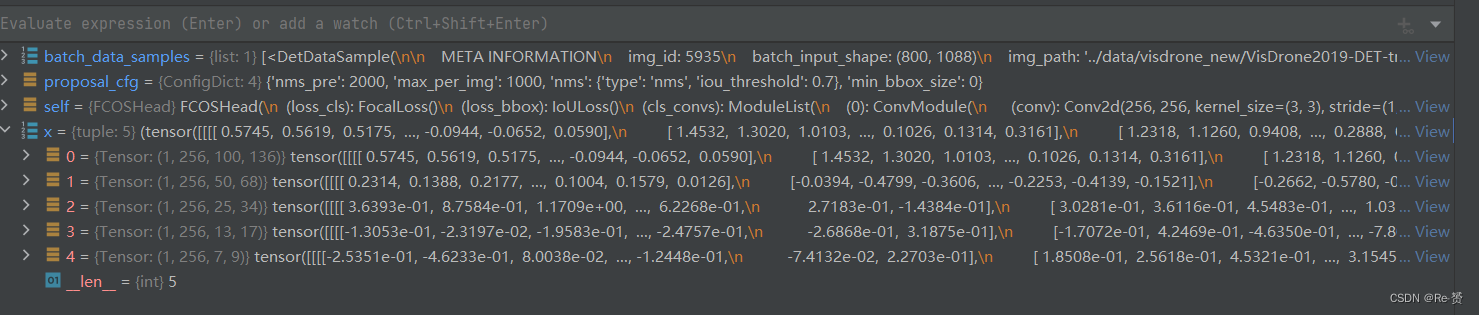
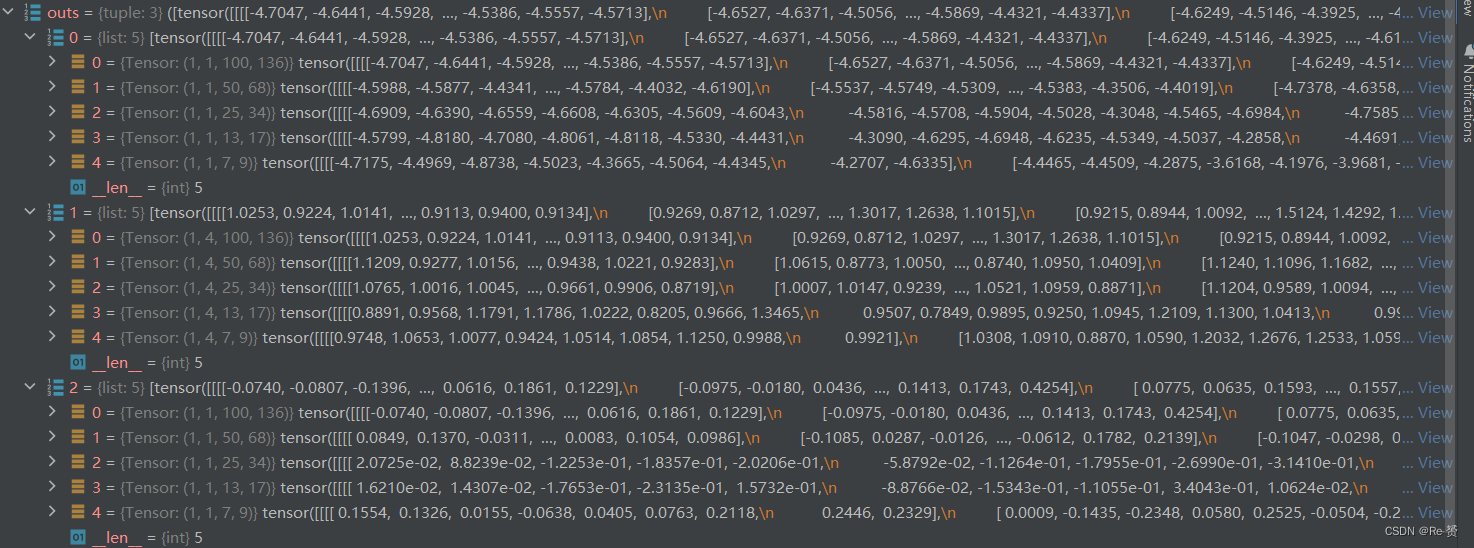
outs = self(x)
输入预测网络预测cls_score, bbox_pred, centerness三个属性
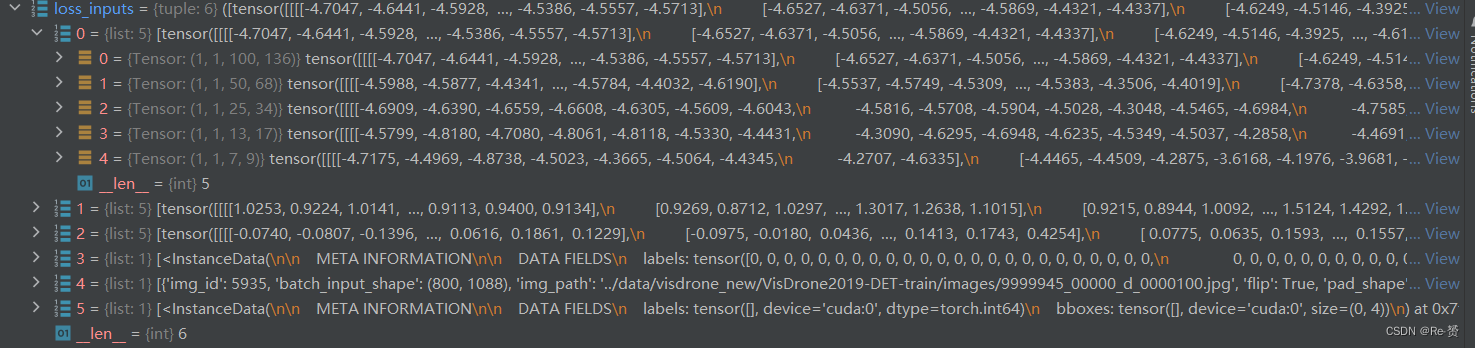
loss_inputs = outs + (batch_gt_instances, batch_img_metas,
batch_gt_instances_ignore)
loss_inputs 元组将用于计算损失函数,其中包括模型的输出 outs、目标实例信息 batch_gt_instances、
图像元信息 batch_img_metas 以及忽略的目标实例信息 batch_gt_instances_ignore
losses = self.loss_by_feat(*loss_inputs) 详见1.1.1
计算损失值

predictions = self.predict_by_feat(
*outs, batch_img_metas=batch_img_metas, cfg=proposal_cfg) 详见1.1.2
生成目标检测的预测成果

1.1.1 loss_by_feat函数(fcos_head.py)
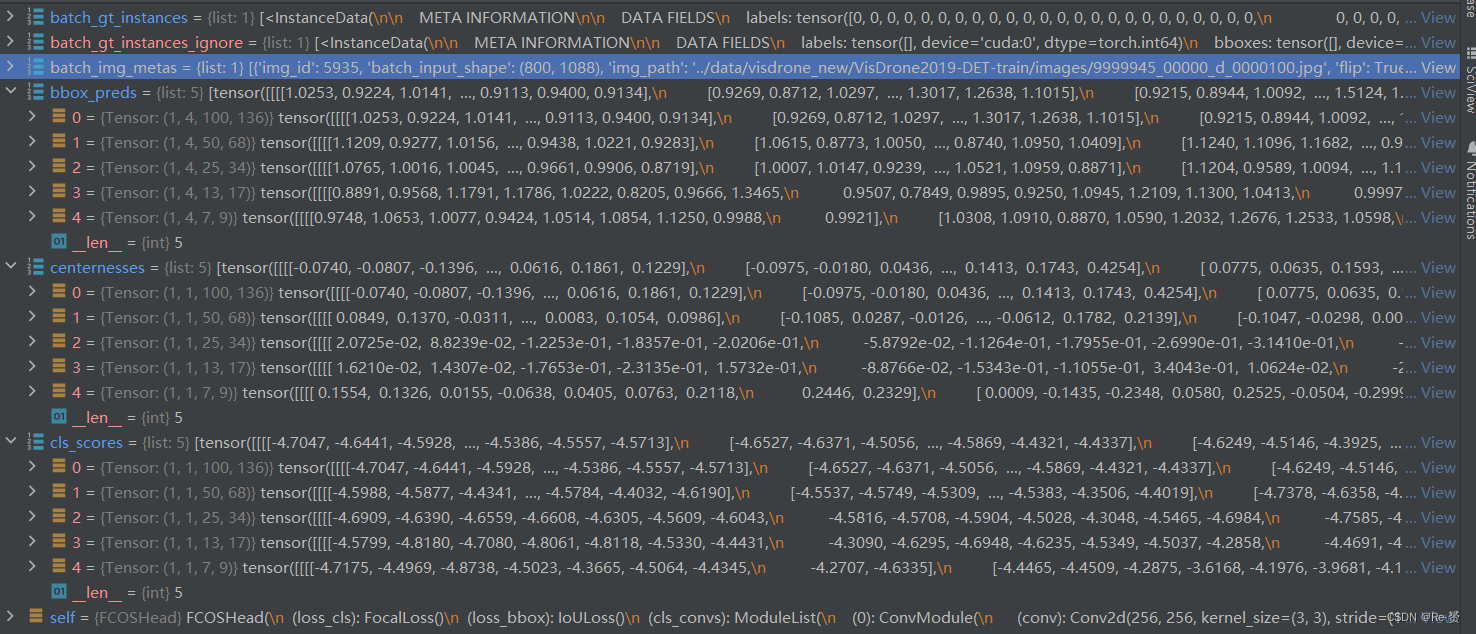
def loss_by_feat(
self,
cls_scores: List[Tensor],
bbox_preds: List[Tensor],
centernesses: List[Tensor],
batch_gt_instances: InstanceList,
batch_img_metas: List[dict],
batch_gt_instances_ignore: OptInstanceList = None
) -> Dict[str, Tensor]:
assert len(cls_scores) == len(bbox_preds) == len(centernesses)
featmap_sizes = [featmap.size()[-2:] for featmap in cls_scores]
获取每一个特征图的尺寸

all_level_points = self.prior_generator.grid_priors(
featmap_sizes,
dtype=bbox_preds[0].dtype,
device=bbox_preds[0].device)
组成先验框的点

labels, bbox_targets = self.get_targets(all_level_points,
batch_gt_instances) 详见1.1.1.1


flatten_cls_scores = [
cls_score.permute(0, 2, 3, 1).reshape(-1, self.cls_out_channels)
for cls_score in cls_scores
]
flatten_bbox_preds = [
bbox_pred.permute(0, 2, 3, 1).reshape(-1, 4)
for bbox_pred in bbox_preds
]
flatten_centerness = [
centerness.permute(0, 2, 3, 1).reshape(-1)
for centerness in centernesses
]
flatten_cls_scores = torch.cat(flatten_cls_scores)
flatten_bbox_preds = torch.cat(flatten_bbox_preds)
flatten_centerness = torch.cat(flatten_centerness)

flatten_labels = torch.cat(labels)
flatten_bbox_targets = torch.cat(bbox_targets)
# repeat points to align with bbox_preds
flatten_points = torch.cat(
[points.repeat(num_imgs, 1) for points in all_level_points])


bg_class_ind = self.num_classes
pos_inds = ((flatten_labels >= 0)
& (flatten_labels < bg_class_ind)).nonzero().reshape(-1)
将背景类的索引设置为 num_classes
用于获取正样本的索引

num_pos = torch.tensor(
len(pos_inds), dtype=torch.float, device=bbox_preds[0].device)
num_pos = max(reduce_mean(num_pos), 1.0)
计算了正样本的数量,并且将其转换为张量 num_pos,后使用 reduce_mean 函数来计算正样本数量的平均值,并使用 max 函数确保这个平均值至少为1.0。

loss_cls = self.loss_cls(
flatten_cls_scores, flatten_labels, avg_factor=num_pos)
使用分类损失函数 self.loss_cls 来计算分类损失
pos_bbox_preds = flatten_bbox_preds[pos_inds]
pos_centerness = flatten_centerness[pos_inds]
pos_bbox_targets = flatten_bbox_targets[pos_inds]
pos_centerness_targets = self.centerness_target(pos_bbox_targets)
# centerness weighted iou loss
centerness_denorm = max(
reduce_mean(pos_centerness_targets.sum().detach()), 1e-6)
通过索引 pos_inds 从之前展平的张量中提取了正样本对应的
边界框预测、中心度预测、边界框目标和中心度目标

if len(pos_inds) > 0:
pos_points = flatten_points[pos_inds]
pos_decoded_bbox_preds = self.bbox_coder.decode(
pos_points, pos_bbox_preds)
pos_decoded_target_preds = self.bbox_coder.decode(
pos_points, pos_bbox_targets)
loss_bbox = self.loss_bbox(
pos_decoded_bbox_preds,
pos_decoded_target_preds,
weight=pos_centerness_targets,
avg_factor=centerness_denorm)
loss_centerness = self.loss_centerness(
pos_centerness, pos_centerness_targets, avg_factor=num_pos)
如果存在正样本
所有点坐标中提取正样本的点坐标
使用边界框编码器解码正样本的边界框预测和目标
计算边界框损失,使用解码后的边界框预测和目标值
计算中心度损失


return dict(
loss_cls=loss_cls,
loss_bbox=loss_bbox,
loss_centerness=loss_centerness)
1.1.1.1 get_targets函数
def get_targets(
self, points: List[Tensor], batch_gt_instances: InstanceList
) -> Tuple[List[Tensor], List[Tensor]]:

assert len(points) == len(self.regress_ranges)
num_levels = len(points)
# expand regress ranges to align with points
expanded_regress_ranges = [
points[i].new_tensor(self.regress_ranges[i])[None].expand_as(
points[i]) for i in range(num_levels)
]
将回归范围扩展以与点对齐

concat_regress_ranges = torch.cat(expanded_regress_ranges, dim=0)
concat_points = torch.cat(points, dim=0)
num_points = [center.size(0) for center in points]
连接所有级别的点和回归范围
存储每个级别中的点的数量


labels_list, bbox_targets_list = multi_apply(
self._get_targets_single,
batch_gt_instances,
points=concat_points,
regress_ranges=concat_regress_ranges,
num_points_per_lvl=num_points)
将 _get_target_single 方法应用到多个图像上,以计算每个图像中的回归、分类和角度目标


labels_list = [labels.split(num_points, 0) for labels in labels_list]
bbox_targets_list = [
bbox_targets.split(num_points, 0)
for bbox_targets in bbox_targets_list
]
将目标分割为每个图像的每个级别


concat_lvl_labels = []
concat_lvl_bbox_targets = []
for i in range(num_levels):
concat_lvl_labels.append(
torch.cat([labels[i] for labels in labels_list]))
bbox_targets = torch.cat(
[bbox_targets[i] for bbox_targets in bbox_targets_list])
if self.norm_on_bbox:
bbox_targets = bbox_targets / self.strides[i]
concat_lvl_bbox_targets.append(bbox_targets)
return concat_lvl_labels, concat_lvl_bbox_targets
连接每个级别中每个图像的目标
返回包含连接后的每个级别的分类标签、回归目标

1.1.2 predict_by_feat函数(base_dense_head.py)
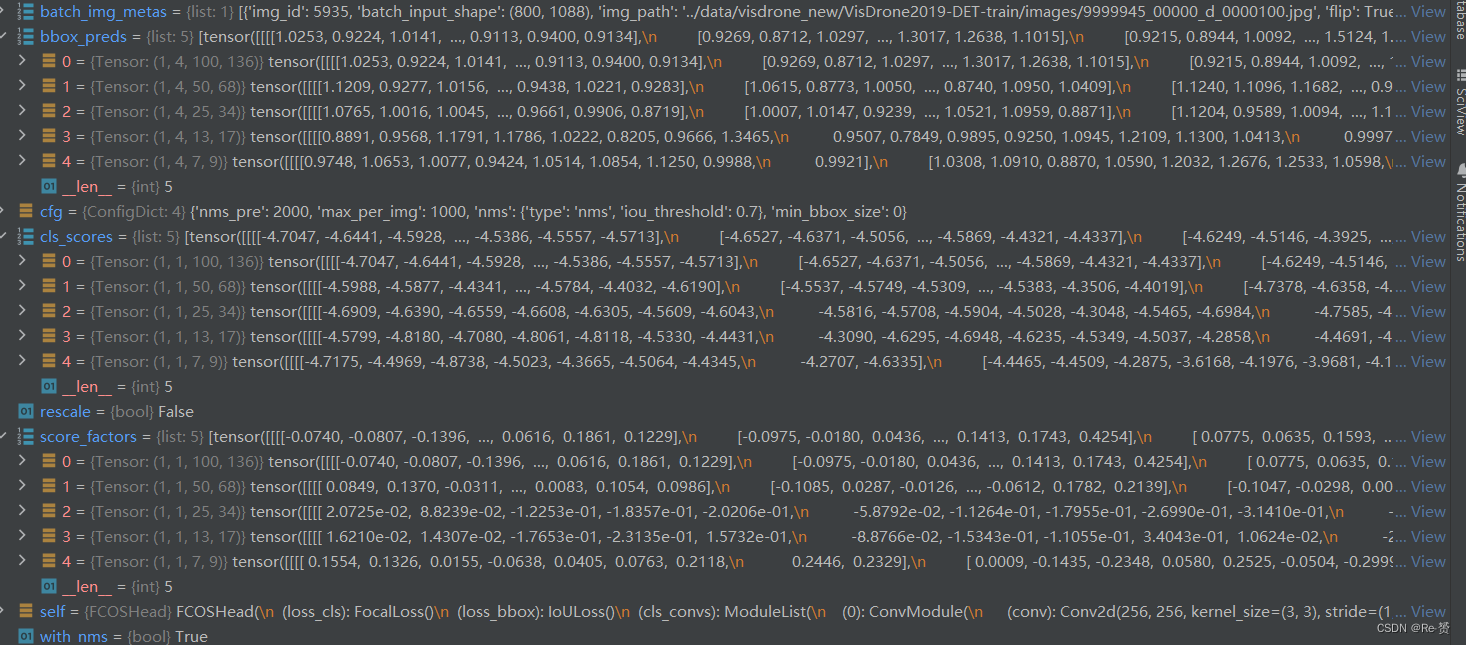
def predict_by_feat(self,
cls_scores: List[Tensor],
bbox_preds: List[Tensor],
score_factors: Optional[List[Tensor]] = None,
batch_img_metas: Optional[List[dict]] = None,
cfg: Optional[ConfigDict] = None,
rescale: bool = False,
with_nms: bool = True) -> InstanceList:
assert len(cls_scores) == len(bbox_preds)
if score_factors is None:
# e.g. Retina, FreeAnchor, Foveabox, etc.
with_score_factors = False
else:
# e.g. FCOS, PAA, ATSS, AutoAssign, etc.
with_score_factors = True
assert len(cls_scores) == len(score_factors)
num_levels = len(cls_scores)

featmap_sizes = [cls_scores[i].shape[-2:] for i in range(num_levels)]
mlvl_priors = self.prior_generator.grid_priors(
featmap_sizes,
dtype=cls_scores[0].dtype,
device=cls_scores[0].device)
获取每个尺度层级的特征图大小
生成每个尺度层级上的先验框坐标


result_list = []
for img_id in range(len(batch_img_metas)):
img_meta = batch_img_metas[img_id]
cls_score_list = select_single_mlvl(
cls_scores, img_id, detach=True)
bbox_pred_list = select_single_mlvl(
bbox_preds, img_id, detach=True)
if with_score_factors:
score_factor_list = select_single_mlvl(
score_factors, img_id, detach=True)
else:
score_factor_list = [None for _ in range(num_levels)]
提取当前图片的类别得分、边界框预测、和中心度预测



results = self._predict_by_feat_single(
cls_score_list=cls_score_list,
bbox_pred_list=bbox_pred_list,
score_factor_list=score_factor_list,
mlvl_priors=mlvl_priors,
img_meta=img_meta,
cfg=cfg,
rescale=rescale,
with_nms=with_nms)
result_list.append(results)
通过单张图片的特征和预测,获取边界框信息 详见1.1.2.1
return result_list

1.1.2.1 _predict_by_feat_single函数(base_dense_head.py)
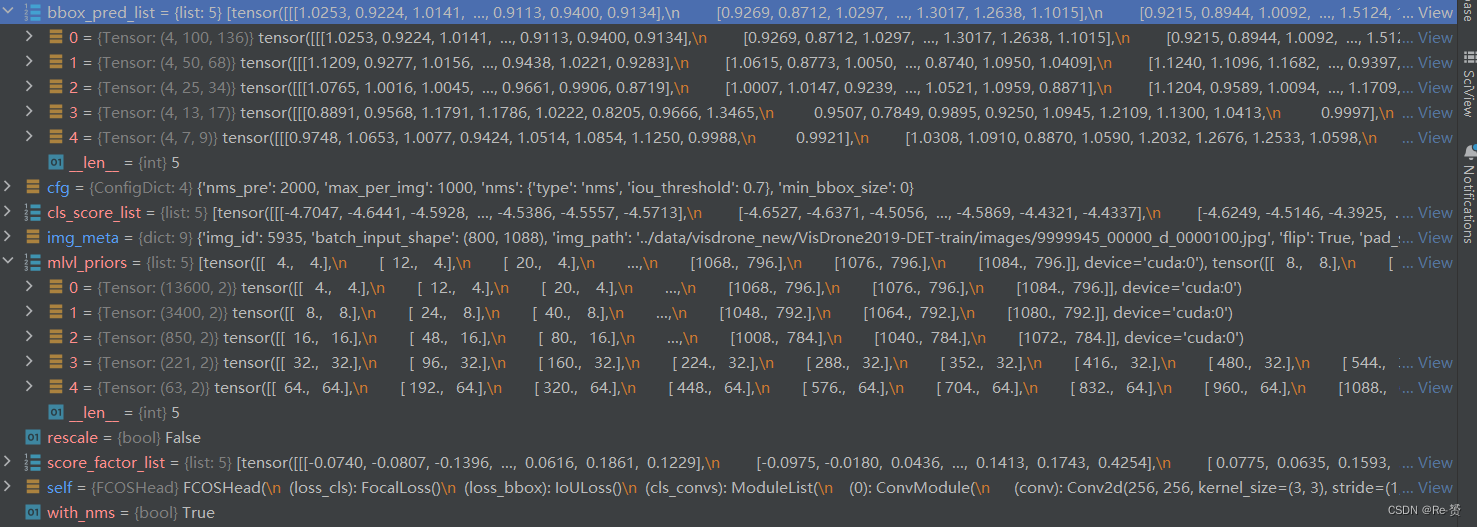
def _predict_by_feat_single(self,
cls_score_list: List[Tensor],
bbox_pred_list: List[Tensor],
score_factor_list: List[Tensor],
mlvl_priors: List[Tensor],
img_meta: dict,
cfg: ConfigDict,
rescale: bool = False,
with_nms: bool = True) -> InstanceData:
if score_factor_list[0] is None:
# e.g. Retina, FreeAnchor, etc.
with_score_factors = False
else:
# e.g. FCOS, PAA, ATSS, etc.
with_score_factors = True
cfg = self.test_cfg if cfg is None else cfg
cfg = copy.deepcopy(cfg)
img_shape = img_meta['img_shape']
nms_pre = cfg.get('nms_pre', -1)
mlvl_bbox_preds = []
mlvl_valid_priors = []
mlvl_scores = []
mlvl_labels = []
if with_score_factors:
mlvl_score_factors = []
else:
mlvl_score_factors = None


for level_idx, (cls_score, bbox_pred, score_factor, priors) in \
enumerate(zip(cls_score_list, bbox_pred_list,
score_factor_list, mlvl_priors)):
assert cls_score.size()[-2:] == bbox_pred.size()[-2:]
dim = self.bbox_coder.encode_size
bbox_pred = bbox_pred.permute(1, 2, 0).reshape(-1, dim)
if with_score_factors:
score_factor = score_factor.permute(1, 2,
0).reshape(-1).sigmoid()
cls_score = cls_score.permute(1, 2,
0).reshape(-1, self.cls_out_channels)
if self.use_sigmoid_cls:
scores = cls_score.sigmoid()
else:
# remind that we set FG labels to [0, num_class-1]
# since mmdet v2.0
# BG cat_id: num_class
scores = cls_score.softmax(-1)[:, :-1]
对每一层特征做处理,这里以第一层100 * 136 作为演示



score_thr = cfg.get('score_thr', 0)
results = filter_scores_and_topk(
scores, score_thr, nms_pre,
dict(bbox_pred=bbox_pred, priors=priors))
使用score_thr和topk过滤结果

scores, labels, keep_idxs, filtered_results = results




bbox_pred = filtered_results['bbox_pred']
priors = filtered_results['priors']


if with_score_factors:
score_factor = score_factor[keep_idxs]
mlvl_bbox_preds.append(bbox_pred)
mlvl_valid_priors.append(priors)
mlvl_scores.append(scores)
mlvl_labels.append(labels)
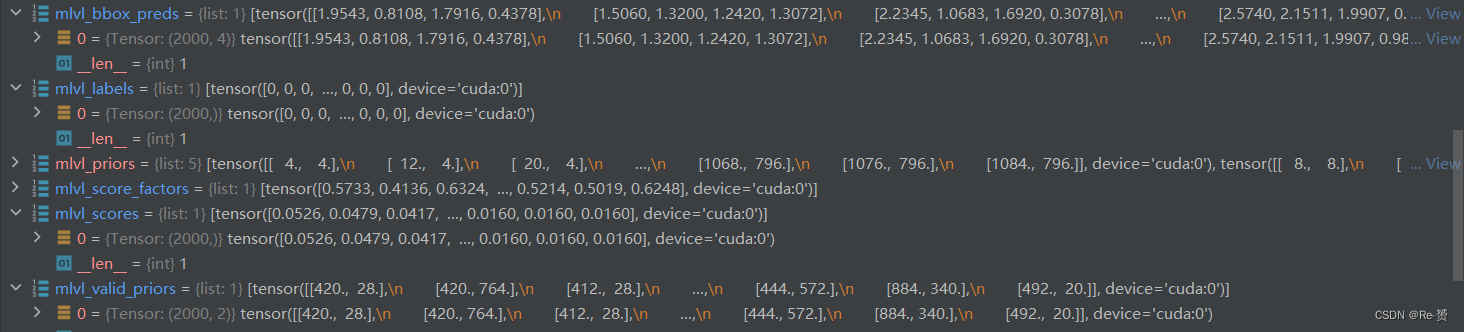
至此循环结束
bbox_pred = torch.cat(mlvl_bbox_preds)
priors = cat_boxes(mlvl_valid_priors)
bboxes = self.bbox_coder.decode(priors, bbox_pred, max_shape=img_shape)


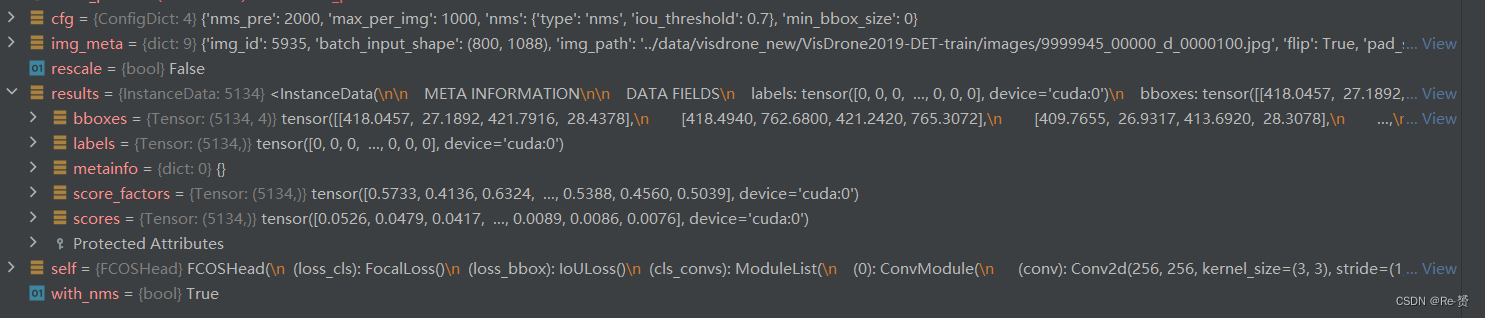
results = InstanceData()
results.bboxes = bboxes
results.scores = torch.cat(mlvl_scores)
results.labels = torch.cat(mlvl_labels)
if with_score_factors:
results.score_factors = torch.cat(mlvl_score_factors)
使用InstanceData类进行封装

return self._bbox_post_process(
results=results,
cfg=cfg,
rescale=rescale,
with_nms=with_nms,
img_meta=img_meta) 详见1.1.2.2
1.1.2.2 _bbox_post_process函数(base_dense_head.py)
def _bbox_post_process(self,
results: InstanceData,
cfg: ConfigDict,
rescale: bool = False,
with_nms: bool = True,
img_meta: Optional[dict] = None) -> InstanceData:
if rescale:
assert img_meta.get('scale_factor') is not None
scale_factor = [1 / s for s in img_meta['scale_factor']]
results.bboxes = scale_boxes(results.bboxes, scale_factor)
if hasattr(results, 'score_factors'):
# TODO: Add sqrt operation in order to be consistent with
# the paper.
score_factors = results.pop('score_factors')
results.scores = results.scores * score_factors
if cfg.get('min_bbox_size', -1) >= 0:
w, h = get_box_wh(results.bboxes)
valid_mask = (w > cfg.min_bbox_size) & (h > cfg.min_bbox_size)
if not valid_mask.all():
results = results[valid_mask]
检测允许的最小边界框的尺寸


if with_nms and results.bboxes.numel() > 0:
bboxes = get_box_tensor(results.bboxes)
det_bboxes, keep_idxs = batched_nms(bboxes, results.scores,
results.labels, cfg.nms)
results = results[keep_idxs]
# some nms would reweight the score, such as softnms
results.scores = det_bboxes[:, -1]
results = results[:cfg.max_per_img]
return results
进行NMS操作并且返回结果






![[GXYCTF 2019]Ping Ping Ping题目解析](https://img-blog.csdnimg.cn/556000ec835f4ff5811087f5604ab94e.png)