目录
背景
CameraMetadata基本概念
Google Metadata
Google—Metadata结构
官方注释
Aandroid API
cameraMetadata头部 : struct camera_metadata
camera_metadata_buffer_entry
struct camera_metadata_entry
data区为什么是一个联合体?
camera metadata头部、entry区、data区关系
CameraMetadata增删改查
allocate_camera_metadata (分配metadata)
find_camera_metadata_entry(从metadata中根据tag查找value)
add_camera_metadata_entry(增加tag和value到metadata)
add_camera_metadata_entry_raw实现
add_camera_metadata_entry用法
delete_camera_metadata_entry(删除tag)
update_camera_metadata_entry(更新tag的value值)
update_camera_metadata_entry实现
append_camera_metadata
clone_camera_metadata
metadata tag分类
android tag
vendor tag
All Tags
Metadata分类
Per Camera Device
Per Session
Per Request
Per Result
Qcom—Metadata整体架构
content
MetaBuffer
Metadata Property
MetadataPool整体架构
为什么引入MetadataPool机制?
MetadataSlot与MetaBuffer的绑定
Camx对meta的管理
InitializeVendorTagInfo
VendorTagManager::GetAllTags
Property
meta的统一管理
背景
首先提出几个关于meta的问题:
- meta是什么?
- tagName,tagID,location,data他们是什么?怎么联系起来的?
- 用什么数据结构管理meta,怎么实现建、增、删、查、改的?
- 根据需求不同,都有哪些meta,他们有什么区别?
- framework meta与hal meta怎么交互,是否存在内存copy, 如何实现的(包括request和result)?
- meta owner是谁?buffer在哪里分配的?生命周期如何?内存大小如何决定?
- pipeline间,node间,meta怎么传递?
- 多帧合成pipeline的meta是怎么处理?
- input meta与output meta的关系? input merge到output?
CameraMetadata基本概念
- Metadata 是整个 Android camera 中类似于高楼大厦中的管道系统一样,贯穿了整个 Camera 的 Framework 和 vendor HAL。Metadata 里面包含了所有的控制、参数、返回值等等。
- Metadata分为Android原生的Metadata和芯片商或者用户自定义的Metadata,即Android Tag和Vendor Tag。Vendor Tag在Hal中定义,并在camx和chi目录中使用。
- 如果是高通平台的话,一般至少存在三类metadata,一类是 Andriod metadata、Qcom metadata、手机厂商自己定义的 metadata。

camera meta简单来说就是用来描述图像特征的参数,比如常见的曝光、ISO等,不难理解他的数据结构应该是由N个key和value组成的。
camera参数多起来可能上百个,用什么样的数据结构来封装这些参数,封装成什么操作,在什么情况下使用这些操作?
如果让你实现对meta的管理,你会怎么实现?
先来看看google是怎么做的:
Google Metadata
Google Metadata相关代码位置:
/system/media/camera/include/system/camera_metadata_tags.h /system/media/camera/src/camera_metadata.c /system/media/camera/src/camera_metadata_tag_info.c


Google—Metadata结构
Metadata: An Array of Entries


主要分为: 1.cameraMetadata头部 2.camera_metadata_buffer_entry区 3.data区
官方注释
|
|
Aandroid API

cameraMetadata头部 : struct camera_metadata

camera_metadata_buffer_entry

struct camera_metadata_entry
typedef struct camera_metadata_entry {
size_t index;//该entry在当前metadata里面的index(0~entry_count-1)
uint32_t tag;//tag的key值
uint8_t type;//TYPE_BYTE、 TYPE_INT32、TYPE_FLOAT、TYPE_INT64、TYPE_DOUBLE、TYPE_RATIONAL
size_t count;//tag的value对应的data的数量。比如data的类型为uint8_t,count为100。则总共为100个字节。
union {
uint8_t *u8;
int32_t *i32;
float *f;
int64_t *i64;
double *d;
camera_metadata_rational_t *r;
} data;// tag的value对应的data值
} camera_metadata_entry_t;data区为什么是一个联合体?
最重要的是data。data是一个联合体,为什么是一个联合体呢?目的就是为了节省空间:比如当类型为枚举时,或者一个整形,那么只需要放在value中存储就行。就没有必要用uint32_t来存储它。和MetaBuffer中的Content是一样的原理。在MetaBufer中,当要存储的内存大小是小于或者等于8个字节时,是直接存储在BYTE m_data[MaxInplaceTagSize];,当存储的内存大小是大于8个字节的,是存放在MemoryRegion中的,这个是高通自己实现的一套metadata框架,相对于Google metadata来说有自己的优势,比较灵活。
camera metadata头部、entry区、data区关系

CameraMetadata增删改查
allocate_camera_metadata (分配metadata)
camera_metadata_t *allocate_camera_metadata(size_ttagkaifa entry_capacity, size_t data_capacity) //申请一块内存给metadata,并且赋初始值
step1:计算metadata需要申请的内存字节数: memory_needed = sizeof(camera_metadata_t) + sizeof(camera_metadata_buffer_entry_t[entry_capacity]) + sizeof(uint8_t[data_capacity])
step2: 使用calloc函数申请内存:void *buffer = calloc(1, memory_needed);
step3: 调用place_camera_metadata() 函数为头部的机构体camera_metadata_t内部变量赋值,camera_metadata_t *metadata = place_camera_metadata(buffer, memory_needed, entry_capacity, data_capacity);
问题1:entry_capacity是怎么计算出来的?怎么知道当前一共有多少entry?data_capacity是怎么计算出来的?
entry_capacity就是预留的entry的数量,一般比可能用到的entry多预留一些。
data_capacity就是预留的data的大小,一般比所有data的总和多预留一些。
问题2:典型用法有哪些?什么时候用?
需要对已有meta做一些腾挪,或者自己创建的pipeline,尤其HAL层以上的pipeline需要新建对应的meta。
|
|
find_camera_metadata_entry(从metadata中根据tag查找value)
int find_camera_metadata_entry(camera_metadata_t *src, uint32_t tag, camera_metadata_entry_t *entry)
step1:从src中找到tag对应的entry的index
step2:根据index将entry拿出来
int find_camera_metadata_entry(camera_metadata_t *src, uint32_t tag, camera_metadata_entry_t *entry)
{
uint32_t index;
if (src->flags & FLAG_SORTED) //有排序,二分法查找
{
camera_metadata_buffer_entry_t *search_entry = NULL;
camera_metadata_buffer_entry_t key;
key.tag = tag;
search_entry = bsearch(&key, get_entries(src), src->entry_count, sizeof(camera_metadata_buffer_entry_t), compare_entry_tags);
if (search_entry == NULL) return NOT_FOUND;
index = search_entry - get_entries(src);
}
else
{ //线性查找
camera_metadata_buffer_entry_t *search_entry = get_entries(src);
for (index = 0; index < src->entry_count; index++, search_entry++) {
if (search_entry->tag == tag) {
break;
}
}
if (index == src->entry_count) return NOT_FOUND;
}
return get_camera_metadata_entry(src, index, entry);
}
// 根据index, 将对应的entry 拿出来
int get_camera_metadata_entry(camera_metadata_t *src, size_t index, camera_metadata_entry_t *entry)
{
camera_metadata_buffer_entry_t *buffer_entry = get_entries(src) + index;
entry->index = index;
entry->tag = buffer_entry->tag;
entry->type = buffer_entry->type;
entry->count = buffer_entry->count;
if (buffer_entry->count * camera_metadata_type_size[buffer_entry->type] > 4) // 大于4字节
{
entry->data.u8 = get_data(src) + buffer_entry->data.offset;
}
else
{
entry->data.u8 = buffer_entry->data.value; // // 小于4字节
}
}add_camera_metadata_entry(增加tag和value到metadata)
int add_camera_metadata_entry(camera_metadata_t *dst, uint32_t tag, const void *data, size_t data_count)
调用下面的add_camera_metadata_entry_raw(camera_metadata_t *dst, uint32_t tag, uint8_t type, const void *data, size_t data_count)
step1:从dst的entry末尾取出一个entry,*entry = get_entriesget_entries(dst) + dst→entry_count
step2:计算entry数据总字节数,如果总字节数 < 4, 直接使用memcpy把data复制到entry→data.value
step3:否则 就给entry->data.offset赋值为dst→data_count, 然后使用memcpy将数据拷贝到entry→data.offset位置
add_camera_metadata_entry_raw实现
|
|
add_camera_metadata_entry用法
|
|
delete_camera_metadata_entry(删除tag)
int delete_camera_metadata_entry(camera_metadata_t *dst, size_t index)
step1:如果entry大于4字节时,先删除旧的数据:把下个entry(当前的data.offset + entry_bytes)的data到后面的整个data区,向前移动entry_bytes个字节,覆盖掉当前entry的数据, 然后更新后面的entry的data.offset
step2:向前移动entry数组覆盖掉要删除的entry
int delete_camera_metadata_entry(camera_metadata_t *dst, size_t index)
{
camera_metadata_buffer_entry_t *entry = get_entries(dst) + index;
size_t data_bytes = calculate_camera_metadata_entry_data_size(entry->type, entry->count);
if (data_bytes > 0) //entry大于4字节
{
// 移动data数据,覆盖要删除的数据
uint8_t *start = get_data(dst) + entry->data.offset;
uint8_t *end = start + data_bytes;
size_t length = dst->data_count - entry->data.offset - data_bytes;
memmove(start, end, length);
// 更新entry的数据偏移
camera_metadata_buffer_entry_t *e = get_entries(dst);
for (i = 0; i < dst->entry_count; i++) {
if (calculate_camera_metadata_entry_data_size(e->type, e->count) > 0 && e->data.offset > entry->data.offset) {
e->data.offset -= data_bytes;
}
++e;
}
dst->data_count -= data_bytes;
}
// 移动entry数组
memmove(entry, entry + 1, sizeof(camera_metadata_buffer_entry_t) * (dst->entry_count - index - 1) );
dst->entry_count -= 1;
}update_camera_metadata_entry(更新tag的value值)
int update_camera_metadata_entry(camera_metadata_t *dst, size_t index, const void *data, size_t data_count, camera_metadata_entry_t *updated_entry)
step1:当要插入的数据和原来entry的数据长度不相等时,如果entry大于4字节时,先删除旧的数据:
把下个entry(当前的data.offset + entry_bytes)的data到后面的整个data区,向前移动entry_bytes个字节,
覆盖掉当前entry的数据, 然后更新后面的entry的data.offset,最后把新的tag数据追加到整个data区的后面
step2:当要插入的数据和原来entry的数据长度相等时,重复利用原来的data内存, 把新的tag数据拷贝到原来的entry的数据区
step3: 如果entry小于等于4字节,直接拷贝到entry→data.value中即可
update_camera_metadata_entry实现
int update_camera_metadata_entry(camera_metadata_t *dst,
size_t index,
const void *data,
size_t data_count,
camera_metadata_entry_t *updated_entry) {
if (dst == NULL) return ERROR;
if (index >= dst->entry_count) return ERROR;
camera_metadata_buffer_entry_t *entry = get_entries(dst) + index;
size_t data_bytes =
calculate_camera_metadata_entry_data_size(entry->type,
data_count);
size_t data_payload_bytes =
data_count * camera_metadata_type_size[entry->type];
size_t entry_bytes =
calculate_camera_metadata_entry_data_size(entry->type,
entry->count);
if (data_bytes != entry_bytes) {
// May need to shift/add to data array
if (dst->data_capacity < dst->data_count + data_bytes - entry_bytes) {
// No room
return ERROR;
}
if (entry_bytes != 0) {
// Remove old data
uint8_t *start = get_data(dst) + entry->data.offset;
uint8_t *end = start + entry_bytes;
size_t length = dst->data_count - entry->data.offset - entry_bytes;
memmove(start, end, length);
dst->data_count -= entry_bytes;
// Update all entry indices to account for shift
camera_metadata_buffer_entry_t *e = get_entries(dst);
size_t i;
for (i = 0; i < dst->entry_count; i++) {
if (calculate_camera_metadata_entry_data_size(
e->type, e->count) > 0 &&
e->data.offset > entry->data.offset) {
e->data.offset -= entry_bytes;
}
++e;
}
}
if (data_bytes != 0) {
// Append new data
entry->data.offset = dst->data_count;
memcpy(get_data(dst) + entry->data.offset, data, data_payload_bytes);
dst->data_count += data_bytes;
}
} else if (data_bytes != 0) {
// data size unchanged, reuse same data location
memcpy(get_data(dst) + entry->data.offset, data, data_payload_bytes);
}
if (data_bytes == 0) {
// Data fits into entry
memcpy(entry->data.value, data,
data_payload_bytes);
}
entry->count = data_count;
if (updated_entry != NULL) {
get_camera_metadata_entry(dst,
index,
updated_entry);
}
assert(validate_camera_metadata_structure(dst, NULL) == OK);
return OK;
}append_camera_metadata
int append_camera_metadata(camera_metadata_t *dst, const camera_metadata_t *src) //将src的metadata中的entry和data追加在dst后
step1:将src的entry_count个entry和data都拷贝到dst的entry后面和data后面
step2:更新dst的entry→data.offset和其他的成员
int append_camera_metadata(camera_metadata_t *dst, const camera_metadata_t *src)
{
memcpy(get_entries(dst) + dst->entry_count, get_entries(src), sizeof(camera_metadata_buffer_entry_t[src->entry_count]));
memcpy(get_data(dst) + dst->data_count, get_data(src), sizeof(uint8_t[src->data_count]));
//更新dst中新加入的entry->data.offset
if (dst->data_count != 0) {
camera_metadata_buffer_entry_t *entry = get_entries(dst) + dst->entry_count; //新增的src的entry 起始地址
for (size_t i = 0; i < src->entry_count; i++, entry++) {
if ( calculate_camera_metadata_entry_data_size(entry->type, entry->count) > 0 ) //data 大于4字节
{
entry->data.offset += dst->data_count; // entry->data.offset在src中本身是有偏移的,所以只需要对每个偏移加上 dst->data_count就可以了
}
}
}
if (dst->entry_count == 0) {
dst->flags |= src->flags & FLAG_SORTED; //dst为空,使用src的存储方式
} else if (src->entry_count != 0) {
dst->flags &= ~FLAG_SORTED; //dst和src都不为空,使用无排序方式
}
dst->entry_count += src->entry_count;
dst->data_count += src->data_count;
dst->vendor_id = src->vendor_id;
}clone_camera_metadata
camera_metadata_t *clone_camera_metadata(const camera_metadata_t *src) /
step1:申请一个camera_metadata_t的内存,大小和src一样大
step2:将src append到这块内存中
camera_metadata_t *clone_camera_metadata(const camera_metadata_t *src)
{
camera_metadata_t *clone = allocate_camera_metadata(get_camera_metadata_entry_count(src), get_camera_metadata_data_count(src));
if (clone != NULL)
{
append_camera_metadata(clone, src);
}
return clone;
}metadata tag分类
tag从归属方可以被分类两类:
- android平台原生tag。如ANDROID_CONTROL_AE_MODE用于控制AE曝光方式(auto、manual等)
- vendor tag(platfrom如Qcom/SumSung/MTK新增tag)。
android tag
tag是通过section的方式来进行分类的,如下:
typedef enum camera_metadata_section {
ANDROID_COLOR_CORRECTION,
ANDROID_CONTROL,
ANDROID_DEMOSAIC,
ANDROID_EDGE,
ANDROID_FLASH,
ANDROID_FLASH_INFO,
ANDROID_HOT_PIXEL,
ANDROID_JPEG,
ANDROID_LENS,
ANDROID_LENS_INFO,
ANDROID_NOISE_REDUCTION,
ANDROID_QUIRKS,
ANDROID_REQUEST,
ANDROID_SCALER,
ANDROID_SENSOR,
ANDROID_SENSOR_INFO,
ANDROID_SHADING,
ANDROID_STATISTICS,
ANDROID_STATISTICS_INFO,
ANDROID_TONEMAP,
ANDROID_LED,
ANDROID_INFO,
ANDROID_BLACK_LEVEL,
ANDROID_SYNC,
ANDROID_REPROCESS,
ANDROID_DEPTH,
ANDROID_LOGICAL_MULTI_CAMERA,
ANDROID_DISTORTION_CORRECTION,
ANDROID_HEIC,
ANDROID_HEIC_INFO,
ANDROID_SECTION_COUNT,
VENDOR_SECTION = 0x8000
} camera_metadata_section_t;上面都是android原生tag的section,每一个section支持的tag总数最大是65536(1<<16)。


vendor tag
vendor tag必须从0x8000000开始使用
All Tags

Metadata分类

Per Camera Device
- 每个相机设备一个,设备数量基于get_number_of_camera
- 启动阶段获取到Provider,且只获取一次
Provider启动的时候通过dlopen和dlsym获得HAL层的::HAL_MODULE_INFO_SYM指针,类型为camera_module_t。 通过调用HAL层module的get_camera_info方法,从底层获得camera_info类型的变量, camera_info内部包含一个camera_metadata_t类型的成员变量









Per Session
- 每次配流时下发
- 一个场景下只下发一次配置参数
在Configure Stream时,在camera3_stream_configuration_t结构体中有camera_metadata_t类型的成员变量,HAL需要检查metadata中的参数值,并相应地配置内部camera pipeline。




Per Request
- 每次下发request时下发到HAL
在下发request时,在camera3_capture_request_t结构体中有camera_metadata_t类型的成员变量。在hardware.h下camera3.h 下定义。


一个camera id,可能对应多个物理camera,camera3_capture_request_t中包含物理camera的数量,对应多个物理camera的情况下,会对应多个metadata
Per Result
- 每次返回result时上传到APP
在收到result时,在camera3_capture_result_t结构体中有camera_metadata_t类型的成员变量,在hardware camera3.h中定义。


一个camera id,可能对应多个物理camera, camera3_capture_result_t中包含物理camera的数量,对应多个物理camera的情况下,会对应多个metadata

Qcom—Metadata整体架构

content

MetaBuffer



Metadata Property

MetadataPool整体架构

- MetaPool机制,各部分是怎么组合关联的?
- MetadataPool各组件的创建(代码流程,configstream时)
- MetadataSlot与MetaBuffer绑定(代码流程,request)
- 通知机制的实现(怎么知道已经准备好了,准备好了之后怎么通知)
- MetadataPool处理多个request,以及node之间存在meta依赖的情况。
- DeferredRequestQueue是和Session一对一的,在session中的成员变量是m_pDeferredRequestQueue
- MetadataPool和Pipeline是多对一,一个Pipeline有多个不同种类的Pool,一种一个
- MetadataPool和MetadataSlot是一对多的关系
- MetadataSlot和MetaBuffer是一对一的关系
为什么引入MetadataPool机制?
MetadataPool处理多个request,以及node之间存在meta依赖的情况。

- 当metadata为Per request 和 Per result的时候,上面会发多个request下来。因为ProcessCaptureRequest是异步的。多个request是存放在队列中的。在pipeline中,会有outstanding多个request在排队中。所以metadatapool需要解决的问题就是,这样的事情。
metadatapool 和 metadataSlot是一对多的关系。
MetadataSlot* m_pSlots[MaxPerFramePoolWindowSize];
static const UINT32 MaxPerFramePoolWindowSize = (RequestQueueDepth + MaxExtraHALBuffer) * 2;
一般每一个node依赖前一个Node的Buffer,和前一个Node的产生的metadata。
2.实现Observer pattern 。在pipelie中,下一个node正常运行,需要上一个Node的metadata,这个时候就有依赖关系存在。怎么样通知下一个node已经准备好了,可以继续往下一个node往下传数据呢?
MetadataSlot与MetaBuffer的绑定
Session::ProcessCaptureRequest会把pipeline中的几个pool拿出来,根据requestid取模,用余数找到对应的slot,再把meta和slot进行attach。
Camx对meta的管理
完整的TagID = (section << 16) + tag
sectionOffset为 (0x8000 << 16), section按遍历顺序,基于sectionOffset递增,tag按定义顺序递增
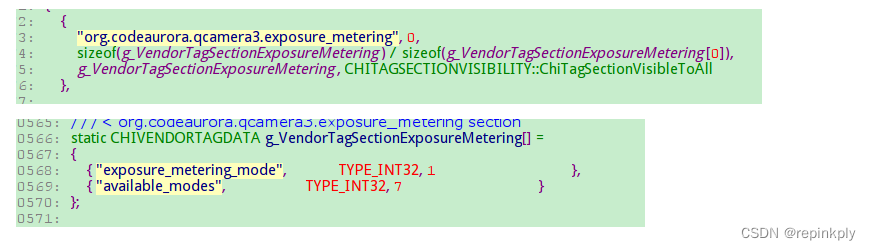
假如vendorTag的第一个tag为“org.codeaurora.qcamera3.exposure_metering”,“exposure_metering_mode”,
则section = 0x8000 + 1, tag = 0;tagID = 0x80010000
第二个tag为“org.codeaurora.qcamera3.exposure_metering”,“available_modes”,
则section = 0x8000 + 1, tag = 1;tagID =0x8001000
tagID什么时候,怎么确定的?
进程启动时,收集所有的vendor Tag:
从HW中获取vendor Tag 信息:
CHIVENDORTAGINFO hwVendorTagInfo ;
pHwEnvironment->GetHwStaticEntry()->QueryVendorTagsInfo(&hwVendorTagInfo);
QueryVendorTagsInfo是在Camxtitan17xcontext.cpp (vendor\qcom\proprietary\camx\src\hwl\titan17x)文件中实现的。
hwVendorTagInfo(g_HwVendorTagSections)的信息定义在Camxvendortagdefines.h (vendor\qcom\proprietary\camx\src\api\vendortag文件中。
获取core的vendorTag信息:
CHIVENDORTAGINFO coreVendorTagInfo = { g_CamXVendorTagSections, CAMX_ARRAY_SIZE(g_CamXVendorTagSections) };
获取core的compomentVendorTag信息:
从external compoment包括( 库的命名规则:VendorName.CategoryName.ModuleName.TargetName.Extension CategoryName: node, stats,hvx,chi) 获取vendor Tag。
InitializeVendorTagInfo
// VendorTagManager::AppendVendorTagInfo
CamxResult VendorTagManager::AppendVendorTagInfo(
const CHIVENDORTAGINFO* pVendorTagInfoToAppend)
{
CamxResult result = CamxResultSuccess;
CAMX_ASSERT(NULL != pVendorTagInfoToAppend);
// This function merge the incoming vendor sections with existing ones. here we allocate a new array of sections and copy
// the existing and incoming sections to the new array. After the successful merge, we will free the existing section
// array and assign the new array to m_vendorTagInfo.
if ((NULL != pVendorTagInfoToAppend) && (pVendorTagInfoToAppend->numSections > 0))
{
CHIVENDORTAGSECTIONDATA* pSectionData =
static_cast<CHIVENDORTAGSECTIONDATA*>(CAMX_CALLOC(sizeof(CHIVENDORTAGSECTIONDATA) *
(m_vendorTagInfo.numSections + pVendorTagInfoToAppend->numSections)));
if (NULL == pSectionData)
{
CAMX_LOG_ERROR(CamxLogGroupCore, "Out of memory!");
result = CamxResultENoMemory;
}
else
{
UINT32 sectionCount = 0;
for (UINT32 i = 0; i < m_vendorTagInfo.numSections; i++)
{
result = CopyVendorTagSectionData(&pSectionData[i], &m_vendorTagInfo.pVendorTagDataArray[i]);
if (CamxResultSuccess != result)
{
CAMX_LOG_ERROR(CamxLogGroupCore, "Failed to copy existing vendor tag section!");
break;
}
else
{
sectionCount++;
}
}
if (CamxResultSuccess == result)
{
CAMX_ASSERT(sectionCount == m_vendorTagInfo.numSections);
for (UINT32 i = 0; i < pVendorTagInfoToAppend->numSections; i++)
{
result = CopyVendorTagSectionData(&pSectionData[m_vendorTagInfo.numSections + i],
&pVendorTagInfoToAppend->pVendorTagDataArray[i]);
if (CamxResultSuccess != result)
{
CAMX_LOG_ERROR(CamxLogGroupCore, "Failed to copy pass in vendor tag section!");
break;
}
else
{
sectionCount++;
}
}
}
if (CamxResultSuccess == result)
{
CAMX_ASSERT(sectionCount == (pVendorTagInfoToAppend->numSections + m_vendorTagInfo.numSections));
FreeVendorTagInfo(&m_vendorTagInfo);
m_vendorTagInfo.pVendorTagDataArray = pSectionData;
m_vendorTagInfo.numSections = sectionCount; //此section有几个tag
}
else
{
CAMX_ASSERT(sectionCount != (pVendorTagInfoToAppend->numSections + m_vendorTagInfo.numSections));
CAMX_LOG_ERROR(CamxLogGroupCore, "Failed to append vendor tag section!");
for (UINT32 i = 0; i < sectionCount; i++)
{
FreeVendorTagSectionData(&pSectionData[i]);
}
CAMX_FREE(pSectionData);
pSectionData = NULL;
}
}
}
return result;
}VendorTagManager::GetAllTags
获取所有vendorTag,整合成一张table,可方便的通过index访问所有vendorTag。
// VendorTagManager::GetAllTags
VOID VendorTagManager::GetAllTags(
VendorTag* pVendorTags,
CHITAGSECTIONVISIBILITY visibility)
{
const CHIVENDORTAGINFO* pVendorTagInfo = VendorTagManager::GetInstance()->GetVendorTagInfo();
UINT32 size = 0;
if (NULL != pVendorTagInfo)
{
for (UINT32 i = 0; i < pVendorTagInfo->numSections; i++)
{
if ((pVendorTagInfo->pVendorTagDataArray[i].visbility == ChiTagSectionVisibleToAll) ||
ChiTagSectionVisibleToAll == visibility ||
Utils::IsBitMaskSet(pVendorTagInfo->pVendorTagDataArray[i].visbility,
static_cast<UINT32>(visibility)))
{
for (UINT32 j = 0; j < pVendorTagInfo->pVendorTagDataArray[i].numTags; j++)
{
pVendorTags[size + j] = pVendorTagInfo->pVendorTagDataArray[i].firstVendorTag + j; //所有vendorTag的完整tagID
}
size += pVendorTagInfo->pVendorTagDataArray[i].numTags;
}
}
}
}
//维护[tagName, tagID]的哈希表,为什么?
VendorTagManager::QueryVendorTagLocation(
for (UINT32 i = 0; i < pVendorTagInfo->numSections; i++)
{
if (0 == OsUtils::StrCmp(pVendorTagInfo->pVendorTagDataArray[i].pVendorTagSectionName, pSectionName))
{
for (UINT32 j = 0; j < pVendorTagInfo->pVendorTagDataArray[i].numTags; j++)
{
if (0 == OsUtils::StrCmp(pVendorTagInfo->pVendorTagDataArray[i].pVendorTagaData[j].pVendorTagName,
pTagName))
{
*pTagLocation = pVendorTagInfo->pVendorTagDataArray[i].firstVendorTag + j;
if (TRUE == validKeyStr)
{
VendorTagManager::GetInstance()->AddTagToHashMap(hash, pTagLocation);
}
result = CamxResultSuccess;
break;
}
}
break;
}
}Property
property是高通私有的tag,一般由高通定义,不希望OEM做修改,他们的section分布如下:
/// @brief Additional classification of tags/properties
enum class PropertyGroup : UINT32
{
Result = 0x3000, ///< Properties found in the result pool
Internal = 0x4000, ///< Properties found in the internal pool
Usecase = 0x5000, ///< Properties found in the usecase pool
DebugData = 0x6000, ///< Properties found in the debug data pool
};
static const PropertyID PropertyIDPerFrameResultBegin = static_cast<UINT32>(PropertyGroup::Result) << 16;
static const PropertyID PropertyIDPerFrameInternalBegin = static_cast<UINT32>(PropertyGroup::Internal) << 16;
static const PropertyID PropertyIDUsecaseBegin = static_cast<UINT32>(PropertyGroup::Usecase) << 16;
static const PropertyID PropertyIDPerFrameDebugDataBegin = static_cast<UINT32>(PropertyGroup::DebugData) << 16;他们的定义如下:
/* Beginning of MainProperty */
static const PropertyID PropertyIDAECFrameControl = PropertyIDPerFrameResultBegin + 0x00;
static const PropertyID PropertyIDAECFrameInfo = PropertyIDPerFrameResultBegin + 0x01;
static const PropertyID PropertyIDAWBFrameControl = PropertyIDPerFrameResultBegin + 0x02;
static const PropertyID PropertyIDAWBFrameInfo = PropertyIDPerFrameResultBegin + 0x03;
static const PropertyID PropertyIDAFFrameControl = PropertyIDPerFrameResultBegin + 0x04;
static const PropertyID PropertyIDAFFrameInfo = PropertyIDPerFrameResultBegin + 0x05;
static const PropertyID PropertyIDAFPDFrameInfo = PropertyIDPerFrameResultBegin + 0x06;
static const PropertyID PropertyIDAFBAFDependencyMet = PropertyIDPerFrameResultBegin + 0x07;
static const PropertyID PropertyIDAFStatsProcessingDone = PropertyIDPerFrameResultBegin + 0x08;
...
/* Beginning of InternalProperty */
static const PropertyID PropertyIDAECInternal = PropertyIDPerFrameInternalBegin + 0x00;
static const PropertyID PropertyIDAFInternal = PropertyIDPerFrameInternalBegin + 0x01;
static const PropertyID PropertyIDASDInternal = PropertyIDPerFrameInternalBegin + 0x02;
static const PropertyID PropertyIDAWBInternal = PropertyIDPerFrameInternalBegin + 0x03;
static const PropertyID PropertyIDAFDInternal = PropertyIDPerFrameInternalBegin + 0x04;
static const PropertyID PropertyIDBasePDInternal = PropertyIDPerFrameInternalBegin + 0x05;
static const PropertyID PropertyIDISPAECBG = PropertyIDPerFrameInternalBegin + 0x06;
static const PropertyID PropertyIDISPAWBBGConfig = PropertyIDPerFrameInternalBegin + 0x07;
static const PropertyID PropertyIDISPBFConfig = PropertyIDPerFrameInternalBegin + 0x08;
...
/* Beginning of UsecaseProperty */
static const PropertyID PropertyIDUsecaseSensorModes = PropertyIDUsecaseBegin + 0x00;
static const PropertyID PropertyIDUsecaseBatch = PropertyIDUsecaseBegin + 0x01;
static const PropertyID PropertyIDUsecaseFPS = PropertyIDUsecaseBegin + 0x02;
static const PropertyID PropertyIDUsecaseLensInfo = PropertyIDUsecaseBegin + 0x03;
static const PropertyID PropertyIDUsecaseCameraModuleInfo = PropertyIDUsecaseBegin + 0x04;
static const PropertyID PropertyIDUsecaseSensorCurrentMode = PropertyIDUsecaseBegin + 0x05;
static const PropertyID PropertyIDUsecaseSensorTemperatureInfo = PropertyIDUsecaseBegin + 0x06;
static const PropertyID PropertyIDUsecaseAWBFrameControl = PropertyIDUsecaseBegin + 0x07;
static const PropertyID PropertyIDUsecaseAECFrameControl = PropertyIDUsecaseBegin + 0x08;
...
/* Beginning of DebugDaGetAndroidMetaIDDebugDataAEC = PropertyIDPerFrameDebugDataBegin + 0x01;
static const PropertyID PropertyIDDebugDataAWB = PropertyIDPerFrameDebugDataBegin + 0x02;
static const PropertyID PropertyIDDebugDataAF = PropertyIDPerFrameDebugDataBegin + 0x03;
static const PropertyID PropertyIDDebugDataAFD = PropertyIDPerFrameDebugDataBegin + 0x04;
static const PropertyID PropertyIDTuningDataIFE = PropertyIDPerFrameDebugDataBegin + 0x05;
static const PropertyID PropertyIDTuningDataIPE = PropertyIDPerFrameDebugDataBegin + 0x06;
static const PropertyID PropertyIDTuningDataBPS = PropertyIDPerFrameDebugDataBegin + 0x07;
static const PropertyID PropertyIDTuningDataTFE = PropertyIDPerFrameDebugDataBegin + 0x08;
...问题1:以上Property有什么区别,分别在什么case下用,怎么用?
后面的metaPool会提到
问题2:PropertyID怎么跟tagName匹配的?
Property只有mainProperty也就是resultProperty才对外暴露,存放在PrivatePropertyTag
///< org.codeaurora.qcamera3.internal_private section
s_VendorTagManagerSingleton.m_cachedVendorTags[VendorTagIndex::PrivatePropertyTag].pSectionName
= "org.codeaurora.qcamera3.internal_private";
s_VendorTagManagerSingleton.m_cachedVendorTags[VendorTagIndex::PrivatePropertyTag].pTagName
= "private_property";问题3:mainProperty在PrivatePropertyTag是怎么存放的?
MetaBuffer::LinearMap::GetAndroidMeta时,将所有对android可暴露的tag从camxMetaBuffer解析出来,
包含camera meta,vendorTag,Property,具体哪些tag暴露可根据策略调整
//1.遍历部分mainProperty的tagID和data地址
for (UINT32 tagIndex = propertyStartIndex; tagIndex < propertyEndIndex; ++tagIndex)
{
const MetadataInfo* pInfo = HAL3MetadataUtil::GetMetadataInfoByIndex(tagIndex);
Content& rContent = m_pMetadataOffsetTable[tagIndex];
if (TRUE == rContent.IsValid())
{
result = HAL3MetadataUtil::AppendPropertyPackingInfo(
rContent.m_tag,
rContent.m_pVaddr,
&packingInfo);
}
}
//2.打包以上mainProperty的tagID和data值,头部4字节存放一共多少个Property
//后面4字节为tagID,紧接着是dataValue;
//下一个4字节为tagID,紧接着继续是dataValue...
//dataValue长度是在camx预先定义好的,所以不需要一起打包进去
HAL3MetadataUtil::PackPropertyInfoToBlob(&packingInfo, pPropertyBlob);
//3.更新打包后的Property集合到PrivatePropertyTag
CamxResult resultLocal = HAL3MetadataUtil::UpdateMetadata(
pAndroidMeta,
propertyBlobId,
pPropertyBlob,
PropertyBlobSize,
TRUE);
CamxResult HAL3MetadataUtil::PackPropertyInfoToBlob(
PropertyPackingInfo* pPackingInfo,
VOID* pPropertyBlob)
{
CamxResult result = CamxResultSuccess;
if (NULL != pPropertyBlob)
{
UINT32* pCount = reinterpret_cast<UINT32*>(pPropertyBlob);
*pCount = pPackingInfo->count;
VOID* pWriteOffset = Utils::VoidPtrInc(pPropertyBlob, sizeof(pPackingInfo->count));
for (UINT32 index = 0; index < pPackingInfo->count; index++)
{
// Write TagId
SIZE_T tagSize = GetPropertyTagSize(pPackingInfo->tagId[index]);
Utils::Memcpy(pWriteOffset, &pPackingInfo->tagId[index], sizeof(UINT32));
pWriteOffset = Utils::VoidPtrInc(pWriteOffset, sizeof(UINT32));
// Write tag address
Utils::Memcpy(pWriteOffset, pPackingInfo->pAddress[index], tagSize);
pWriteOffset = Utils::VoidPtrInc(pWriteOffset, tagSize);
}
}
else
{
CAMX_LOG_ERROR(CamxLogGroupMeta, "Property blob is null");
result = CamxResultEFailed;
}
return result;
}
CamxResult HAL3MetadataUtil::UnPackBlobToPropertyInfo(
PropertyPackingInfo* pPackingInfo,
VOID* pPropertyBlob)
{
// First 4 bytes correspoint to number of tags
CamxResult result = CamxResultSuccess;
if (NULL != pPropertyBlob)
{
UINT32* pCount = reinterpret_cast<UINT32*>(pPropertyBlob);
pPackingInfo->count = *pCount;
VOID* pReadOffset = Utils::VoidPtrInc(pPropertyBlob, sizeof(pPackingInfo->count));
for (UINT32 i = 0; i < pPackingInfo->count; i++)
{
// First 4 bytes correspond to tagId followed by the tagValue
pPackingInfo->tagId[i] = *reinterpret_cast<UINT32*>(pReadOffset);
pReadOffset = Utils::VoidPtrInc(pReadOffset, sizeof(UINT32));
SIZE_T tagSize = GetPropertyTagSize(pPackingInfo->tagId[i]);
pPackingInfo->pAddress[i] = reinterpret_cast<BYTE*>(pReadOffset);
pReadOffset = Utils::VoidPtrInc(pReadOffset, tagSize);
}
}
else
{
CAMX_LOG_ERROR(CamxLogGroupMeta, "Property blob is null");
result = CamxResultEFailed;
}
return result;
}
meta的统一管理
//未完待续....,后续跟新...