🚀 作者 :“码上有钱”
🚀 文章简介 :AI-扩散算法
🚀 欢迎小伙伴们 点赞👍、收藏⭐、留言💬
项目
扩散模型加噪去噪过程
原理
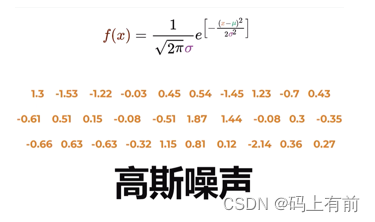
高斯噪声
在深度学习中,高斯噪声通常指的是一种服从高斯分布(正态分布)的随机噪声。它可以用来模拟真实世界数据中的噪声,并用于数据增强、数据生成和对抗训练等任务中。
在深度学习中,高斯噪声通常被添加到输入数据中,以模拟真实世界中存在的噪声。例如,在图像分类任务中,为了增强模型的鲁棒性,可以给输入图片添加高斯噪声,并通过训练使网络能够去除这些噪声而正确分类图像。又比如,在生成对抗网络(GAN)中,生成器网络在生成图片时,也会利用高斯噪声来增加图片的多样性和真实感。
高斯噪声的形式可以表示如下:
X = σ ∗ N ( 0 , 1 ) + μ X = \sigma * N(0, 1) + \mu X=σ∗N(0,1)+μ
其中, N ( 0 , 1 ) N(0, 1) N(0,1) 表示均值为0,方差为1的标准正态分布。 σ \sigma σ控制噪声的幅度, μ \mu μ表示噪声的均值。
在深度学习中,我们可以将高斯噪声加到输入数据上,也可以将其加到网络参数上。具体来说,当将高斯噪声添加到输入数据时,我们可以将噪声视为一种正则化机制,它有助于减小模型对输入的过拟合。而当将高斯噪声添加到网络参数时,我们可以将噪声视为随机搜索的一种策略,帮助模型在训练过程中跳出局部极小值。
具体应用中,我们常使用均值为0、标准差为1的标准正态分布生成随机数作为噪声
ϵ
∼
N
(
0
,
1
)
\epsilon \sim N(0, 1)
ϵ∼N(0,1)
然后通过一个线性变换使得其满足我们要求的分布形状。这样生成的高斯噪声可以用来增强输入数据或者是网络参数。
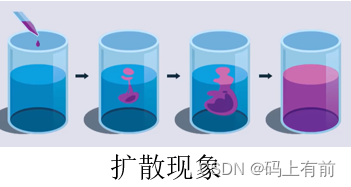
扩散现象
在数学和物理学中,扩散是指粒子从一个区域向其它区域的传递。这个过程可以描述为一个颗粒从初始位置开始随机移动,直到某个时刻停止。在此过程中,粒子以很高速度在一个方向上移动并与其他粒子发生碰撞,最终达到平衡状态。
在自然界中,扩散是一种非常普遍的现象,比如风经过树叶的摩擦会造成树叶的运动,污染物在空气中的传播也可以用扩散模型来解释。
在化学反应中,扩散是指物质由浓度较高的地方向浓度较低的地方传输。扩散是许多重要现象的基础,例如气体的扩散、电解质溶液的扩散等。
贝叶斯公式
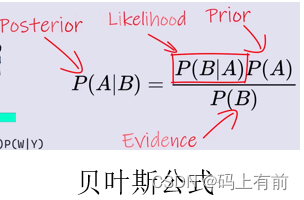
贝叶斯公式是应用在概率论和统计学中的。在机器学习中,我们经常使用贝叶斯公式来计算后验概率。
设有两个事件A和B,其中B不为0,则有
P
(
A
∣
B
)
=
P
(
B
∣
A
)
⋅
P
(
A
)
P
(
B
)
P(A|B) = \frac{P(B|A) \cdot P(A)}{P(B)}
P(A∣B)=P(B)P(B∣A)⋅P(A)
其中, P ( A ∣ B ) P(A|B) P(A∣B)表示给定事件B发生的情况下,事件A发生的概率,称为后验概率。 P ( B ∣ A ) P(B|A) P(B∣A)表示给定事件A发生的情况下,事件B发生的概率,称为似然度。 P ( A ) P(A) P(A)和 P ( B ) P(B) P(B)分别是事件A和B的边缘概率分布。
对于分类问题,我们假设输入样本 x x x属于类别 C k C_{k} Ck的概率与日期 t t t无关;即 P ( y ∣ x , t ) = P ( y ∣ x ) P(y|x,t)=P(y|x) P(y∣x,t)=P(y∣x), y ∈ { 1 , 2..... K } y\in\{1,2.....K\} y∈{1,2.....K}, t ∈ T t\in T t∈T,其中 T T T是时间序列。
根据贝叶斯公式,后验概率可以表述如下:
\begin{equation}\label{eq:bayes}
P(y|x)=\frac{P(x|y)P(y)}{P(x)}
\end{equation}
假设存在一个集合 T T T,包含了一些期望的某一特性或性质。具体说来,对于每一个观察到的点 x t x_t xt,我们希望计算概率 P ( x t ∣ H ) P(x_t|H) P(xt∣H),这里 H H H为假设。显然,在有限数据集的情况下,我们不能够取遍所有可能的 H H H,但是可以通过给定一些先验概率及常识假设来选择一个最可能的 H H H。接下来,我们通常通过最大化后验概率获得参数 θ MAP ( k ) \theta_{\text{MAP}}^{(k)} θMAP(k)的推断。
θ MAP ( k ) = arg max θ k ( P ( θ k ∣ D 1 , . . . , D n ) = P ( D 1 , . . . , D n ∣ θ k ) P ( θ k ) P ( D 1 , . . . , D n ) ) \theta_{\text{MAP}}^{(k)} = \argmax_{\theta_k}\left(P(\theta_k|D_1,..., D_n)=\frac{P(D_1, ..., D_n|\theta_k)P(\theta_k)}{P(D_1, ..., D_n)}\right) θMAP(k)=θkargmax(P(θk∣D1,...,Dn)=P(D1,...,Dn)P(D1,...,Dn∣θk)P(θk))
最大似然法与期望极大算法
在实际应用中,最小化损失函数的过程往往比较复杂,缺乏闭式解。一个替代方案是使用贝叶斯公式定义的误差函数。它被称为对数损失函数(log loss function),或交叉熵损失函数(cross-entropy loss function)。对于二分类问题,可以使用如下形式来定义:
L
(
y
,
f
(
x
)
)
=
−
(
y
log
y
^
+
(
1
−
y
)
log
(
1
−
y
^
)
)
L(y, f(\mathbf{x})) = -(y\log{\hat{y}} + (1 - y)\log{(1 - \hat{y})})
L(y,f(x))=−(ylogy^+(1−y)log(1−y^))
其中
y
y
y为样本的真实类别,
y
^
\hat{y}
y^为模型预测的类别。对于多分类问题,可以应用softmax函数,将其转化为一系列二分类问题:
L
(
y
,
f
(
x
)
)
=
−
∑
c
∈
C
y
c
log
y
^
c
L(y, f(\mathbf{x})) = -\sum_{c \in C} y_c \log{\hat{y}_c}
L(y,f(x))=−c∈C∑yclogy^c
其中
C
C
C表示所有可能的类别。
在求解最优参数时,我们通常不会直接使用这些损失函数,而是使用它们的平均值或者总和。例如,给定训练样本 ( x 1 , y 1 ) (x_1, y_1) (x1,y1)、 ( x 2 , y 2 ) (x_2, y_2) (x2,y2)、…、 ( x n , y n ) (x_n, y_n) (xn,yn),我们要试图最小化下式:
1 n ∑ i = 1 n L ( y i , f ( x i ) ) \frac{1}{n}\sum_{i=1}^n L(y_i, f(x_i)) n1i=1∑nL(yi,f(xi))
其中 L ( y i , f ( x i ) ) L(y_i, f(x_i)) L(yi,f(xi))是针对每个样本点的“损失(loss)”函数, n n n是样本数
神经网络中的梯度下降
当模型不断调整时,损失函数也在变化,我们需要找到一个方法来计算目标函数的导数,以便能够确定是否达到了最佳状态或者最低点。Stanford大学的教授Andrew Ng曾经描述过使用梯度下降算法寻找函数最小值的方法:
- 随机初始化参数 W 1 , b 1 , W 2 , b 2 W_1,b_1,W_2,b_2 W1,b1,W2,b2。
- 不断重复以下操作,直至满足停止条件:
- 计算损失函数关于参数的梯度。
- 更新参数 W 1 , b 1 , W 2 , b 2 W_1,b_1,W_2,b_2 W1,b1,W2,b2。
这一方法被称为“随机梯度下降(Stochastic Gradient Descent)”。在每次安装数据计算梯度时,我们从训练集中随机选择一个样本,并基于此样本来进行梯度更新。这种方法之所以起作用是因为它使用了足够大的训练集,足够小的学习率和足够的迭代次数,使得最终的模型达到收敛。
对于正则化,对于L2范数惩罚而言,有可微的简化公式:
∂
∂
w
(
1
/
2
∥
w
∥
2
2
)
=
w
\frac{\partial}{\partial w}(1/2\parallel w \parallel_{2}^{2}) = w
∂w∂(1/2∥w∥22)=w
对于L1范数惩罚而言,则有:
∂
∂
w
(
∥
w
∥
1
)
=
s
g
n
(
w
)
\frac{\partial}{\partial w}(\parallel w \parallel_{1}) = sgn(w)
∂w∂(∥w∥1)=sgn(w)
对于整个目标函数,最后的形式是:
J
(
θ
)
=
∑
i
=
1
m
(
y
(
i
)
l
o
g
(
h
θ
(
x
(
i
)
)
)
+
(
1
−
y
(
i
)
)
l
o
g
(
1
−
h
θ
(
x
(
i
)
)
)
)
+
λ
2
∑
j
=
1
n
w
j
2
J(\theta)=\sum_{i=1}^{m}( y^{(i)}log(h_{\theta}(x^{(i)})) + (1 - y^{(i)})log(1 - h_{\theta}(x^{(i)}))) + \frac{\lambda}{2}\sum_{j=1}^{n}w_j^2
J(θ)=i=1∑m(y(i)log(hθ(x(i)))+(1−y(i))log(1−hθ(x(i))))+2λj=1∑nwj2
逻辑回归损失函数的导数
根据逻辑回归函数的定义:
h
θ
(
x
(
i
)
)
=
g
(
θ
T
x
(
i
)
)
g
(
z
)
=
1
1
+
e
−
z
\begin{aligned} h_{\theta}(x^{(i)}) &= g(\theta^T x^{(i)}) \\ g(z)& = \frac{1}{1+e^{-z}} \end{aligned}
hθ(x(i))g(z)=g(θTx(i))=1+e−z1
我们接下来计算
δ
\delta
δ 代表误差值:
δ
=
−
∂
∂
z
∑
i
=
1
m
(
y
(
i
)
l
o
g
(
h
θ
(
x
(
i
)
)
)
+
(
1
−
y
(
i
)
)
l
o
g
(
1
−
h
θ
(
x
(
i
)
)
)
)
\delta = -\frac{\partial}{\partial z} \sum_{i=1}^{m}( y^{(i)}log(h_{\theta}(x^{(i)})) + (1 - y^{(i)})log(1 - h_{\theta}(x^{(i)})))
δ=−∂z∂i=1∑m(y(i)log(hθ(x(i)))+(1−y(i))log(1−hθ(x(i))))
对
δ
\delta
δ 做一些变换就可以得到:
δ
=
−
∑
i
=
1
m
(
y
(
i
)
−
h
θ
(
x
(
i
)
)
)
=
(
y
^
−
Y
)
\delta = -\sum_{i=1}^{m}(y^{(i)} - h_{\theta}(x^{(i)})) = (\hat{y} - Y)
δ=−i=1∑m(y(i)−hθ(x(i)))=(y^−Y)
即误差项为: y ^ − Y \hat{y} - Y y^−Y
对于上述公式,我们可以发现
P
(
Y
=
y
∣
X
)
P(Y=y|X)
P(Y=y∣X) 可以解出:
P
(
Y
=
y
i
∣
X
)
=
exp
(
W
⋅
x
)
∑
j
=
1
k
exp
(
W
j
⋅
x
)
P(Y = y_i | X) = \frac{\exp^{(W \cdot x)}}{\sum_{j=1}^{k}\exp^{(W_j \cdot x)}}
P(Y=yi∣X)=∑j=1kexp(Wj⋅x)exp(W⋅x)
用代码实现如下:
class LogisticRegression:
def __init__(self, learning_rate=0.1, iterations=100):
self.learning_rate = learning_rate #learning rate
self.iterations = iterations #num of iterations in GD
def fit(self, X, y):
self.X_train = X
self.y_train = y
self.n_samples, self.n_features = X.shape
self.W = np.zeros(self.n_features + 1) #Add 1 to the shape for bias term
self.costs = []
X = np.column_stack((np.ones((self.n_samples,1)), X))
m = self.n_samples
for i in range(self.iterations):
h = self.sigmoid(np.dot(X, self.W))
self.grad =(1 / m) * X.T @ (h - y)
self.W -= self.learning_rate * self.grad
if i % 100 == 0:
cost = self.cost_function(X, y)
self.costs.append(cost)
print(f"Cost at iteration {i}", cost)
def sigmoid(self, z):
return 1 / (1 + np.exp(-z))
def cost_function(self, X, y):
h = self.sigmoid(np.dot(X, self.W))
epsilon = 1e-5
errors = y*np.log(h+epsilon) + (1-y)*np.log(1-h+epsilon)
J = - np.sum(errors)
return J
def predict_proba(self, X):
X = np.column_stack((np.ones((X.shape[0],1)), X))
return self.sigmoid(np.dot(X,self.W))
def predict(self, X, threshold=0.5):
X = np.column_stack((np.ones((X.shape[0],1)), X))
return self.predict_proba(X) >= threshold
def score
过程
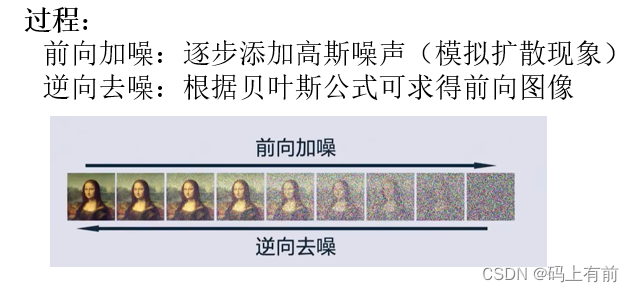
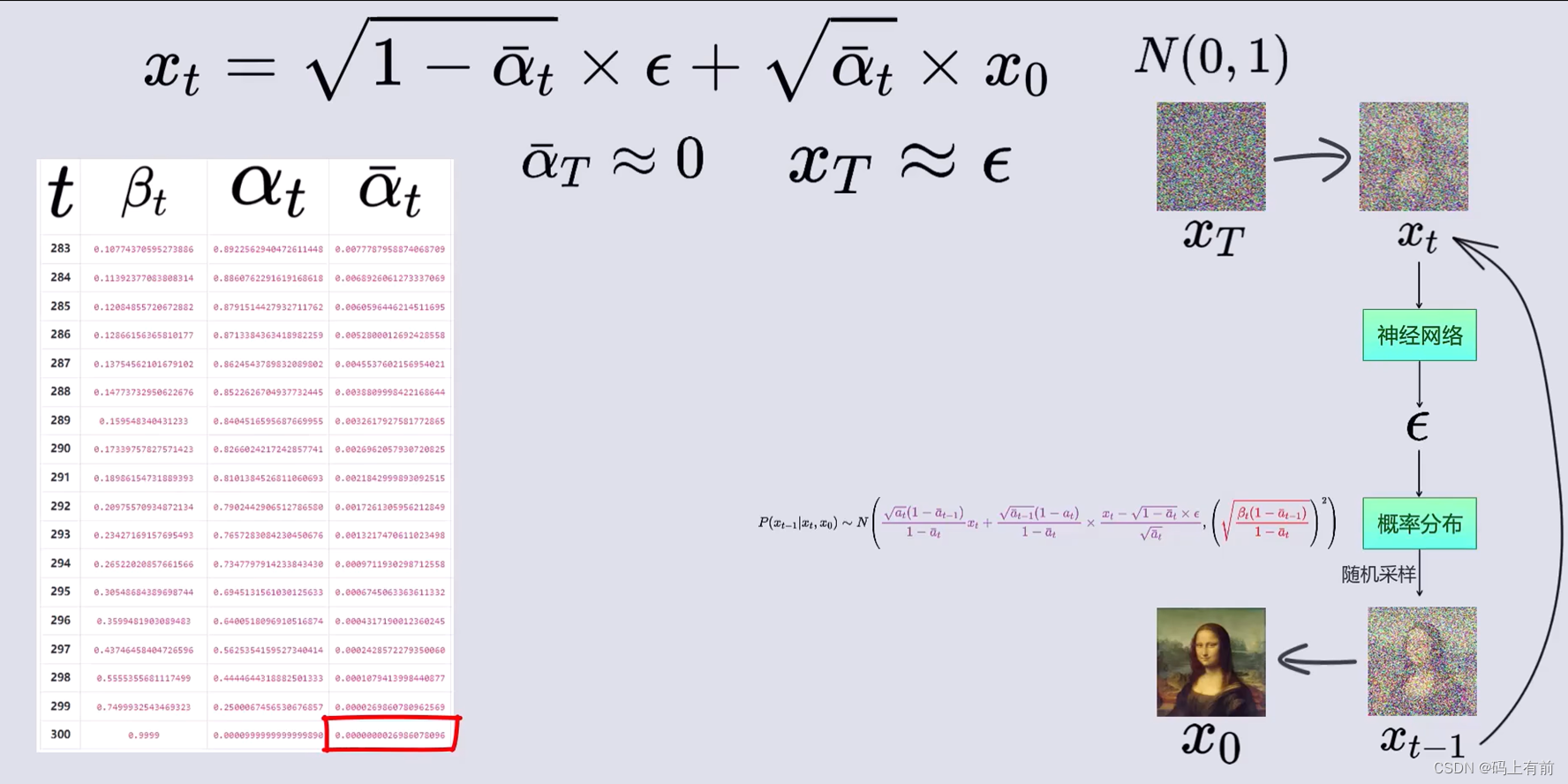
前向加噪
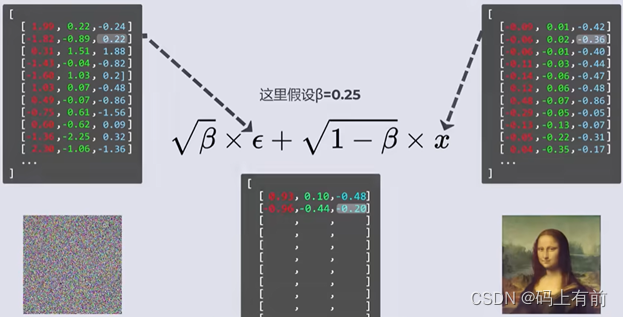
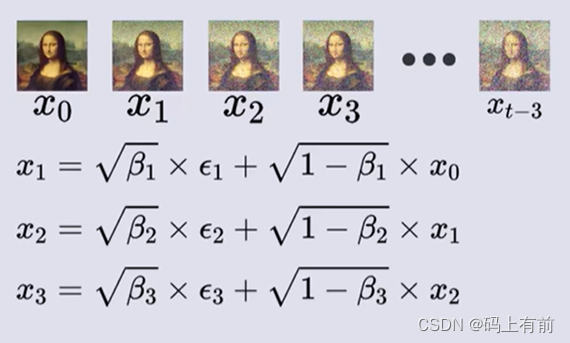
图像有三个通道的RGB颜色组成,同时我们生成一个服从正太分布的高斯噪声,通过归一化将其放缩到[-1, 1]上,通过下面这个公式进行计算加噪后的新图像,这里面的β表示扩散快慢的程度,越大表示扩散越快。
通过逐步加噪最终将图像变得完全模糊,在不断的迭代下逐渐模糊,但是发现一个问题,只能获得下一时刻加噪的图像。
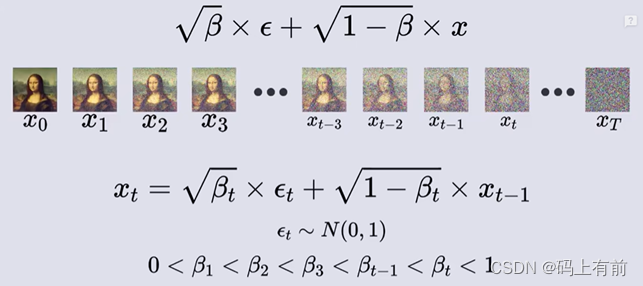
因此我们将1式代入2式再代入3式
令β = 1-α 可以得到一个t-2到t时刻的通式

我们计算出上述标红所服从的概率,再通过重参数化技巧将其转化
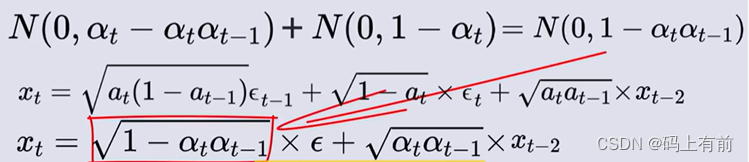
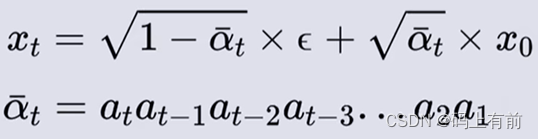
通过数学归纳法,就可以算出0时刻到任意t时刻的通式了

化简,令根号下多个α连乘为α拔,得到下面式子
逆向去噪
逆向去噪是已知T时刻图像而求前一图像的过程,因此我们使用贝叶斯公式
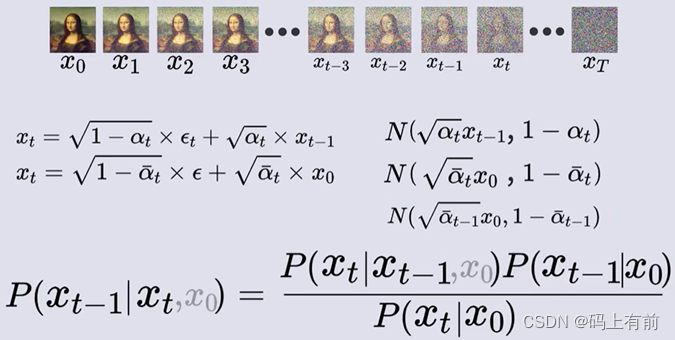
同样我们计算出右式中每个概率服从的概率密度,然后写出写出他们的概率密度函数代入到式中
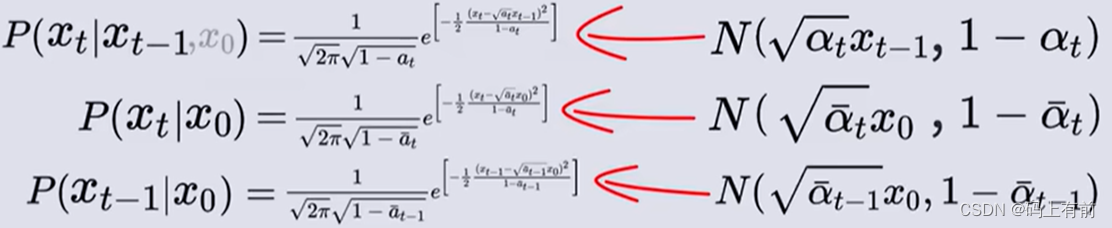
代入右式

通过概率密度函数我们化简得到这个概率服从的概率密度
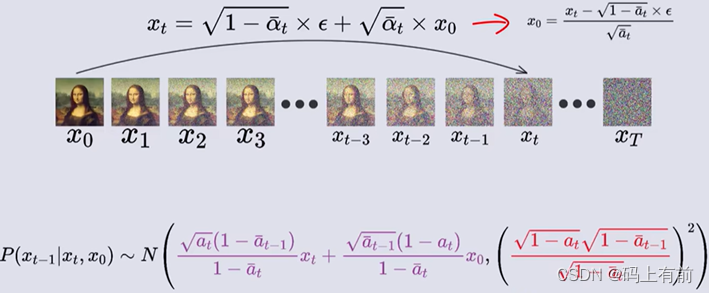
发现其中我们已知t时刻时求前一时刻的概率出现了0时刻的图像,但是我们又不知道0时刻的,陷入了死循环,这时我们将加噪过程中t时刻与0时刻的通式关系代入,化简,得到已知t时刻得到前一时刻图像服从的概率

经过神经网络得到噪声的概率分布,经过随机采样得到t-1时刻的图像,经过不断迭代最终得到0时刻的图像,这就是整个过程,我们可以看到最后的α拔几乎为0,那么就得到t时刻的图像就为噪声了,服从标准正太分布。
作用
DDPM(Diffusion Probabilistic Model)概率扩散模型的优点和作用主要包括以下几个方面:
- 模型简单:相对于其他复杂的深度学习模型,DDPM模型非常简单,只需要实现一个局部噪声条件分布即可。
- 高效:DDPM模型使用了可逆卷积层和空间金字塔池化等技术来提高计算效率,并且通过引入低秩分解技术来降低参数量。
- 灵活性:DDPM模型可以应用于多种不同领域的任务,如图像去噪、超分辨率、图像插值等。
- 生成图片质量高:DDPM模型能够生成高质量的图片,并且可以对生成的图片进行插值、缩放等操作。
- 建模便捷:DDPM模型的训练过程相对简单,只需要最小化重建误差即可。此外,模型具有较好的泛化性能,可以在小样本情况下有效地工作。
- 特征重要性分析:通过DDPM模型,可以对输入图像的特征进行分析,例如,可以检测图像中的不同对象,并确定每个对象的权重。
总之,DDPM概率扩散模型具有模型简单、高效、灵活性、生成图片质量高等优点,可以广泛应用于各种图像处理任务中。
应用场景
概率扩散去噪模型的应用场景有很多,主要包括以下几个方面:
- 图像去噪:可以利用概率扩散去噪模型对图像进行降噪处理。例如,可以使用高斯模糊、中值滤波、双边滤波等方法来去除图像中的噪声。
- 音频去噪:可以利用概率扩散去噪模型对音频进行降噪处理。例如,可以使用自适应滤波、谱减法等方法来减少语音信号中的噪声干扰。
- 视频去噪:可以利用概率扩散去噪模型对视频进行降噪处理。例如,可以利用时空域的相关性进行视频去噪。
- 文本去噪:可以利用概率扩散去噪模型对文本数据进行降噪处理。例如,可以利用N-gram模型进行词性标注和语法分析。
- 信号增强:可以利用概率扩散去噪模型对信号进行增强处理。例如,可以使用小波变换对信号进行降噪。
总之,概率扩散去噪模型可以应用于各种类型的信号处理任务,可用于去除噪声、增强信号的目的。
看到这了点个赞吧🍉







![[鹏城杯 2022]简单的php - 无数字字母RCE+取反【*】](https://img-blog.csdnimg.cn/f86d1776abe04b54a02d7d21e9fd56e2.png)