深度学习——权重衰减(weight_decay)
文章目录
- 前言
- 一、权重衰减
- 1.1. 范数与权重衰减
- 1.2. 高维线性回归
- 1.3. 从零开始实现
- 1.3.1.初始化模型参数
- 1.3.2. 定义L₂范数惩罚
- 1.3.3. 定义训练代码实现
- 1.3.4. 不管正则化直接训练
- 1.3.5. 使用权重衰减
- 1.4. 简洁实现
- 总结
前言
上一章描述了过拟合的问题,本章我们将介绍一些正则化模型的技术。如权重衰减
参考书:
《动手学深度学习》
一、权重衰减
1.1. 范数与权重衰减
在训练参数化机器学习模型时,权重衰减(weight decay)是最广泛使用的正则化的技术之一, 它通常也被称为 L 2 L_2 L2正则化。这项技术通过函数与零的距离来衡量函数的复杂度,
因为在所有函数 f f f中,函数 f = 0 f = 0 f=0(所有输入都得到值 0 0 0),在某种意义上是最简单的。
但是我们应该如何精确地测量一个函数和零之间的距离呢?
一种简单的方法是通过线性函数
f
(
x
)
=
w
⊤
x
f(\mathbf{x}) = \mathbf{w}^\top \mathbf{x}
f(x)=w⊤x 中的权重向量的某个范数来度量其复杂性,
例如
∥
w
∥
2
\| \mathbf{w} \|^2
∥w∥2。
要保证权重向量比较小,最常用方法是将其范数作为惩罚项加到最小化损失的问题中:
即将原来的训练目标最小化训练标签上的预测损失,调整为最小化预测损失和惩罚项之和。
现在,如果我们的权重向量增长的太大,我们的学习算法可能会更集中于最小化权重范数 ∥ w ∥ 2 \| \mathbf{w} \|^2 ∥w∥2。这正是我们想要的。
我们的损失由下式给出:
L
(
w
,
b
)
=
1
n
∑
i
=
1
n
1
2
(
w
⊤
x
(
i
)
+
b
−
y
(
i
)
)
2
.
L(\mathbf{w}, b) = \frac{1}{n}\sum_{i=1}^n \frac{1}{2}\left(\mathbf{w}^\top \mathbf{x}^{(i)} + b - y^{(i)}\right)^2.
L(w,b)=n1i=1∑n21(w⊤x(i)+b−y(i))2.
为了惩罚权重向量的大小,我们必须以某种方式在损失函数中添加 ∥ w ∥ 2 \| \mathbf{w} \|^2 ∥w∥2
但是模型应该如何平衡这个新的额外惩罚的损失?
实际上,我们通过正则化常数
λ
\lambda
λ来描述这种权衡,这是一个非负超参数,我们使用验证数据拟合:
L ( w , b ) + λ 2 ∥ w ∥ 2 , L(\mathbf{w}, b) + \frac{\lambda}{2} \|\mathbf{w}\|^2, L(w,b)+2λ∥w∥2,
对于 λ > 0 \lambda > 0 λ>0,我们限制 ∥ w ∥ \| \mathbf{w} \| ∥w∥的大小。
为什么在这里我们使用平方范数而不是标准范数(即欧几里得距离)?
我们这样做是为了便于计算。通过平方
L
2
L_2
L2范数,我们去掉平方根,留下权重向量每个分量的平方和。
这使得惩罚的导数很容易计算:导数的和等于和的导数。
此外,为什么我们首先使用 L 2 L_2 L2范数,而不是 L 1 L_1 L1范数。
L
2
L_2
L2正则化线性模型构成经典的岭回归(ridge regression)算法,
L
1
L_1
L1正则化线性回归是统计学中类似的基本模型,通常被称为套索回归(lasso regression)。
使用 L 2 L_2 L2范数的一个原因是它对权重向量的大分量施加了巨大的惩罚。这使得我们的学习算法偏向于在大量特征上均匀分布权重的模型。在实践中,这可能使它们对单个变量中的观测误差更为稳定。
相比之下,
L
1
L_1
L1惩罚会导致模型将权重集中在一小部分特征上,
而将其他权重清除为零。这称为特征选择(feature selection),可能是其他场景下需要的。
L 2 L_2 L2正则化回归的小批量随机梯度下降更新如下式:
w ← ( 1 − η λ ) w − η ∣ B ∣ ∑ i ∈ B x ( i ) ( w ⊤ x ( i ) + b − y ( i ) ) . \begin{aligned} \mathbf{w} & \leftarrow \left(1- \eta\lambda \right) \mathbf{w} - \frac{\eta}{|\mathcal{B}|} \sum_{i \in \mathcal{B}} \mathbf{x}^{(i)} \left(\mathbf{w}^\top \mathbf{x}^{(i)} + b - y^{(i)}\right). \end{aligned} w←(1−ηλ)w−∣B∣ηi∈B∑x(i)(w⊤x(i)+b−y(i)).
我们根据估计值与观测值之间的差异来更新
w
\mathbf{w}
w。然而,我们同时也在试图将
w
\mathbf{w}
w的大小缩小到零。
这就是为什么这种方法有时被称为权重衰减。我们仅考虑惩罚项,优化算法在训练的每一步衰减权重。
与特征选择相比,权重衰减为我们提供了一种连续的机制来调整函数的复杂度。 较小的 λ \lambda λ值对应较少约束的 w \mathbf{w} w,而较大的 λ \lambda λ值对 w \mathbf{w} w的约束更大。
是否对相应的偏置
b
2
b^2
b2进行惩罚在不同的实践中会有所不同,
在神经网络的不同层中也会有所不同。通常,网络输出层的偏置项不会被正则化。
1.2. 高维线性回归
我们通过一个简单的例子来演示权重衰减。
首先,我们像以前一样生成一些数据,生成公式如下:
y = 0.05 + ∑ i = 1 d 0.01 x i + ϵ where ϵ ∼ N ( 0 , 0.0 1 2 ) . y = 0.05 + \sum_{i = 1}^d 0.01 x_i + \epsilon \text{ where } \epsilon \sim \mathcal{N}(0, 0.01^2). y=0.05+i=1∑d0.01xi+ϵ where ϵ∼N(0,0.012).
我们选择标签是关于输入的线性函数。标签同时被均值为0,标准差为0.01高斯噪声破坏。
为了使过拟合的效果更加明显,我们可以将问题的维数增加到
d
=
200
d = 200
d=200,
并使用一个只包含20个样本的小训练集。
import torch
from d2l import torch as d2l
from torch import nn
n_train,n_test,num_inputs,batch_size = 20,100,200,5
true_w,true_b = torch.ones((num_inputs,1))*0.01,0.05
"""
使用d2l.synthetic_data函数生成了训练数据和测试数据,并使用d2l.load_array函数将数据加载为迭代器。
"""
train_data = d2l.synthetic_data(true_w,true_b,n_train)
train_iter = d2l.load_array(train_data,batch_size)
test_data = d2l.synthetic_data(true_w,true_b,n_test)
test_iter = d2l.load_array(test_data,batch_size,is_train= False)
#这里设置is_train=False表示测试数据不用于模型训练,只用于评估模型的性能。
1.3. 从零开始实现
下面我们将从头开始实现权重衰减,只需将 L 2 L_2 L2的平方惩罚添加到原始目标函数中。
1.3.1.初始化模型参数
#初始化模型参数
#我们将定义一个函数来随机初始化模型参数
def init_params():
w = torch.normal(0,1,size=(num_inputs,1),requires_grad= True)
b = torch.zeros(1,requires_grad=True)
return [w,b]
1.3.2. 定义L₂范数惩罚
#定义L2范数惩罚(实现这一惩罚最方便的方法是对所有项求平方后并将它们求和)
def l2_penalty(w):
return torch.sum(w.pow(2))/2 #将权重w的平方和除以2,除以2是为了方便计算梯度
1.3.3. 定义训练代码实现
#定义训练代码实现
def train(lambd):
w,b = init_params()
net,loss = lambda x: d2l.linreg(x,w,b),d2l.squared_loss
num_epochs,lr = 100,0.003
animator = d2l.Animator(xlabel="epochs",ylabel="loss",yscale="log",xlim= [5,num_epochs],legend=["train","test"])
for epoch in range(num_epochs):
for x,y in train_iter:
#增加了L2范数惩罚项
#广播机制使l2_penalty(w)成为一个长度为batch_size的向量
l = loss(net(x),y) + lambd * l2_penalty(w)
l.sum().backward()
d2l.sgd([w,b],lr,batch_size)
if (epoch+1)%5 ==0:
animator.add(epoch+1,(d2l.evaluate_loss(net,train_iter,loss),
d2l.evaluate_loss(net,test_iter,loss)))
print("w的L2范数是:",torch.norm(w).item())
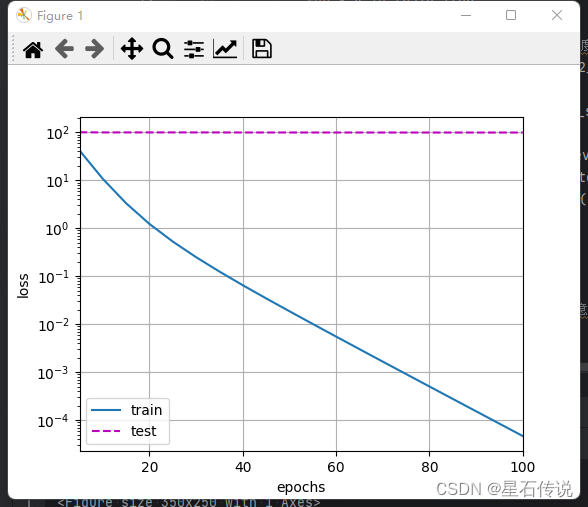
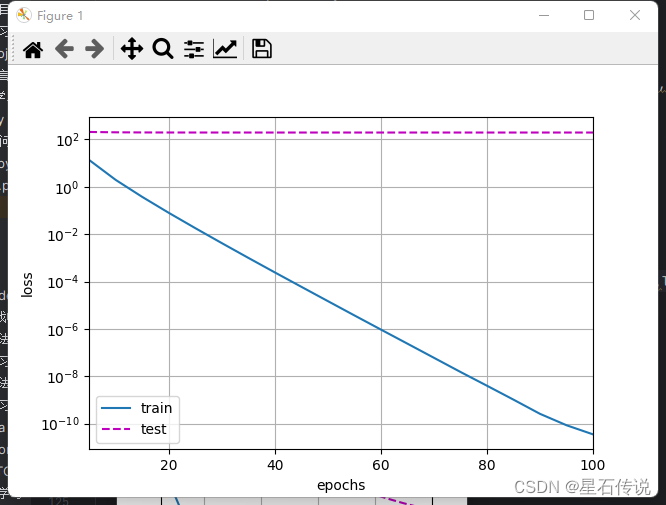
1.3.4. 不管正则化直接训练
#现在用`lambd = 0`禁用权重衰减后运行这个代码。
#注意,这里训练误差有了减少,但测试误差没有减少,这意味着出现了严重的过拟合。
train(lambd= 0)
#结果:
w的L2范数是: 13.981727600097656
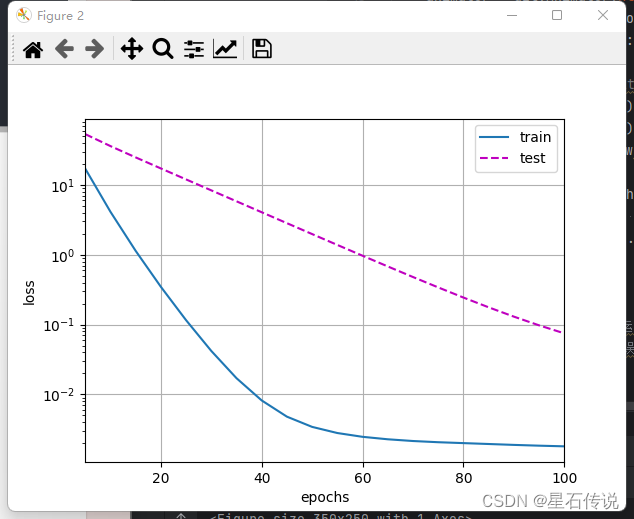
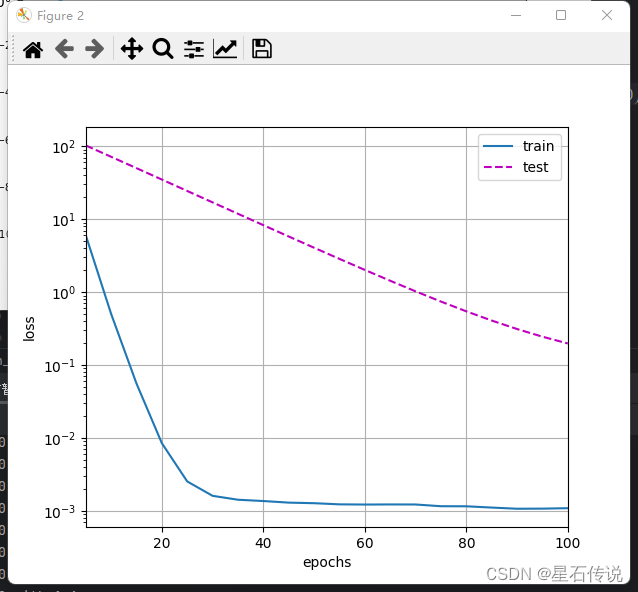
1.3.5. 使用权重衰减
#使用权重衰减来运行代码。
#注意,在这里训练误差增大,但测试误差减小。这正是我们期望从正则化中得到的效果。
train(lambd= 3)
#结果:
w的L2范数是: 0.3319331705570221
d2l.plt.show()
1.4. 简洁实现
深度学习框架为了便于我们使用权重衰减,将权重衰减集成到优化算法中,以便与任何损失函数结合使用。
#在下面的代码中,我们在实例化优化器时直接通过`weight_decay`指定weight decay超参数。
#默认情况下,PyTorch同时衰减权重和偏移。
#这里我们只为权重设置了`weight_decay`,所以偏置参数$b$不会衰减。
def train_concise(wd):
net = nn.Sequential(nn.Linear(num_inputs,1))
for param in net.parameters():
param.data.normal_() #使用正态分布随机初始化参数
loss = nn.MSELoss(reduction="none") #定义损失函数为均方误差损失
num_epochs,lr = 100,0.003
#偏置参数没有衰减
trainer = torch.optim.SGD(
[{"params":net[0].weight,"weight_decay":wd},
{"params":net[0].bias}],lr = lr
) #net[0].weight表示模型的权重参数,net[0].bias表示模型的偏置参数。weight_decay参数用于设置权重衰减的强度。
animator = d2l.Animator(xlabel="epochs",ylabel="loss",yscale="log",xlim=[5,num_epochs],
legend=["train","test"])
for epoch in range(num_epochs):
for x,y in train_iter:
trainer.zero_grad() #清零梯度,以防止梯度累积
l = loss(net(x),y)
l.mean().backward() #计算损失的平均值,并进行反向传播,计算梯度
trainer.step() #更新模型的参数,执行一步优化器的更新
if (epoch+1)%5 == 0:
animator.add(epoch+1,(d2l.evaluate_loss(net,train_iter,loss),d2l.evaluate_loss(net,test_iter,loss)))
print("w的L2范数:", net[0].weight.norm().item()) #打印模型权重的L2范数,用于评估模型的复杂度。
train_concise(0)
train_concise(3)
d2l.plt.show()
#结果:
w的L2范数: 13.411089897155762
w的L2范数: 0.3319282829761505
总结
为了有效防止模型的过拟合,降低模型的复杂度,提高泛化能力,本章简单记录了一种常见的正则化技术:权重衰减。简单来说权重衰减是通过在损失函数中添加一个正则化项来实现的。这个正则化项通常是模型参数的L2范数(平方和)或L1范数(绝对值和),通过限制模型参数的大小来防止过拟合。
我独泊兮其未兆,如婴儿之未孩,傫傫(lèi lèi)兮,若无所归。
–2023-10-2 进阶篇