一、四元数解法
为了求解惯性导航的力学方程,姿态矩阵
R
b
b
R^b_{b}
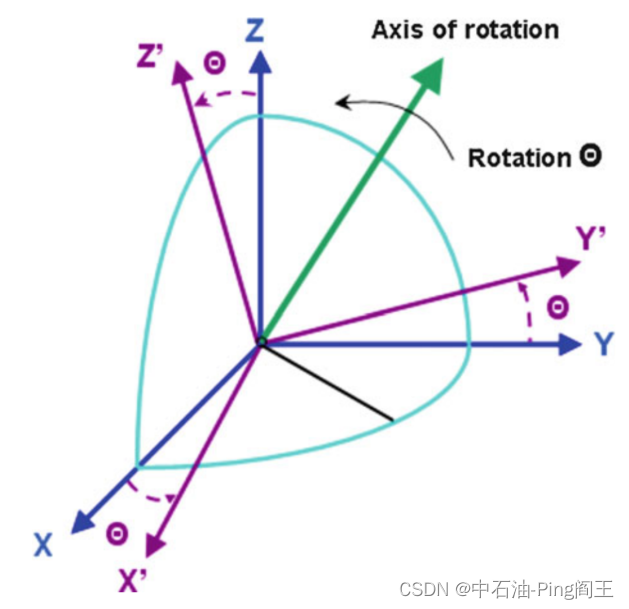
Rbb可以有姿态微分方程得到。其中,四元数是常用的方法,如下图所示,假设刚体在原点旋转,根据欧拉定理,运动坐标系(b系列)相对于导航坐标系(n系列)的方向,相当于b系绕等效轴旋转一个角度Θ。
用四元数
Q
=
[
q
1
q
2
q
3
q
4
]
T
Q=\begin{bmatrix}q1 & q2 &q3&q4 \end{bmatrix}^T
Q=[q1q2q3q4]T来描述b系统相对于n系统的旋转。定义如下:
Q
=
[
q
1
q
2
q
3
q
4
]
=
[
(
Θ
x
/
Θ
)
s
i
n
(
Θ
/
2
)
(
Θ
y
/
Θ
)
s
i
n
(
Θ
/
2
)
(
Θ
z
/
Θ
)
s
i
n
(
Θ
/
2
)
c
o
s
(
Θ
/
2
)
]
Q = \begin{bmatrix} q1 \\ q2 \\q3\\q4\end{bmatrix} = \begin{bmatrix} (Θ_{x}/Θ)sin(Θ/2) \\ (Θ_{y}/Θ)sin(Θ/2) \\(Θ_{z}/Θ)sin(Θ/2)\\cos(Θ/2)\end{bmatrix}
Q=
q1q2q3q4
=
(Θx/Θ)sin(Θ/2)(Θy/Θ)sin(Θ/2)(Θz/Θ)sin(Θ/2)cos(Θ/2)
其中,
Θ
=
Θ
x
2
+
Θ
y
2
+
Θ
z
2
Θ = \sqrt{Θ^2_{x}+Θ^2_{y}+Θ^2_{z}}
Θ=Θx2+Θy2+Θz2,
Θ
x
/
Θ
,
Θ
y
/
Θ
,
Θ
z
/
Θ
Θ_{x}/Θ,Θ_{y}/Θ,Θ_{z}/Θ
Θx/Θ,Θy/Θ,Θz/Θ是n坐标系中的方向余弦。
从四元数的定义来看,
q
1
2
+
q
2
2
+
q
3
2
+
q
4
2
=
1
q^2_{1}+q^2_{2}+q^2_{3}+q^2_{4}=1
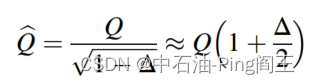
q12+q22+q32+q42=1,四元数的分量不是相互独立的,只需要三个独立的四元数分量来描述坐标轴的旋转。然而,通常存在计算误差,定义为
Δ
=
1
−
q
1
2
+
q
2
2
+
q
3
2
+
q
4
2
Δ = 1-q^2_{1}+q^2_{2}+q^2_{3}+q^2_{4}
Δ=1−q12+q22+q32+q42。为了纠正这一错误,每次计算后都需要将向量形式的四元数Q更新为以下公式:
用一阶微分方程描述四元数的时域变化: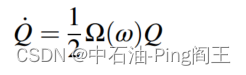
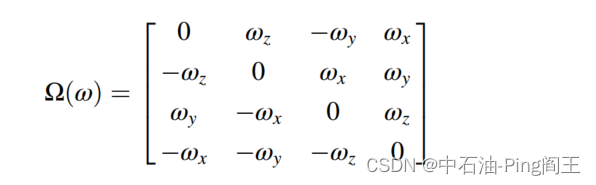
其中,
w
x
,
w
y
,
w
z
w_{x},w_{y},w_{z}
wx,wy,wz是载体的角速度。
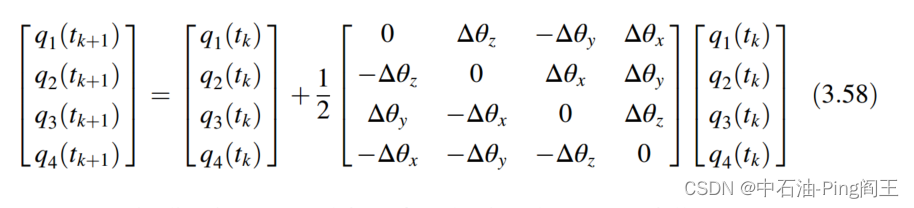
求解一阶微分方程,根据tk时刻的Qk,求出tk + 1时刻的Qk + 1,如下所示: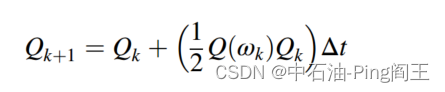
当时刻tk,四元数确定时,
R
b
n
R^n_{b}
Rbn可直接由下式确定:
R
b
n
=
[
R
11
R
12
R
13
R
21
R
22
R
23
R
31
R
32
R
33
]
R^n_{b} = \begin{bmatrix} R_{11} &R_{12}&R_{13}\\ R_{21} &R_{22}&R_{23}\\ R_{31} &R_{32}&R_{33} \end{bmatrix}
Rbn=
R11R21R31R12R22R32R13R23R33
=
[
q
1
2
−
q
2
2
−
q
3
2
+
q
4
2
2
(
q
1
q
2
−
q
3
q
4
)
2
(
q
1
q
2
+
q
3
q
4
)
2
(
q
1
q
2
+
q
3
q
4
)
−
q
1
2
+
q
2
2
−
q
3
2
+
q
4
2
2
(
q
2
q
3
−
q
1
q
4
)
2
(
q
1
q
3
−
q
2
q
4
)
2
(
q
2
q
3
+
q
1
q
4
)
−
q
1
2
−
q
2
2
+
q
3
2
+
q
4
2
]
=\begin{bmatrix} q^2_{1}-q^2_{2}-q^2_{3}+q^2_{4} &2(q_{1}q_{2}-q_{3}q_{4})&2(q_{1}q_{2}+q_{3}q_{4})\\ 2(q_{1}q_{2}+q_{3}q_{4}) &-q^2_{1}+q^2_{2}-q^2_{3}+q^2_{4}&2(q_{2}q_{3}-q_{1}q_{4})\\ 2(q_{1}q_{3}-q_{2}q_{4})&2(q_{2}q_{3}+q_{1}q_{4})&-q^2_{1}-q^2_{2}+q^2_{3}+q^2_{4} \end{bmatrix}
=
q12−q22−q32+q422(q1q2+q3q4)2(q1q3−q2q4)2(q1q2−q3q4)−q12+q22−q32+q422(q2q3+q1q4)2(q1q2+q3q4)2(q2q3−q1q4)−q12−q22+q32+q42
得到四元数的更新方程为:
得到倾角θ,工具面φ和方位ψ如下
θ
=
a
r
c
t
a
n
(
R
32
R
12
2
+
R
22
2
)
θ=arctan(\frac{R_{32}}{\sqrt{R^2_{12}+R^2_{22}}})
θ=arctan(R122+R222R32)
ϕ
=
a
r
c
t
a
n
(
−
R
31
R
33
)
\phi=arctan(\frac{-R_{31}}{R_{33}})
ϕ=arctan(R33−R31)
ψ
=
a
r
c
t
a
n
(
−
R
12
R
22
)
\psi=arctan(\frac{-R_{12}}{R_{22}})
ψ=arctan(R22−R12)
进而可得到井斜角
I
=
90
−
θ
I = 90-\theta
I=90−θ.
在捷联导航系统中,由于GPS对准,在建立误差模型后,采用卡尔曼滤波方法可以获得准确的载体姿态和位置信息。但在随钻测量中,无法使用GPS信号校正,需要重新建立卡尔曼滤波模型。随钻陀螺测量系统的卡尔曼滤波模型,由于采用了惯性陀螺仪和加速度传感器,其误差模型与航空航天领域捷联导航的卡尔曼滤波误差模型一致。从可靠性的角度来看,目前在钻井测量领域,基于磁的测量系统比陀螺仪系统更具应用优势。然而,由于磁干扰等因素,磁基系统不可能完全完善。未来的发展方向必然是复合模式测量系统,即磁传感器与陀螺仪系统相结合的随钻测量系统。
剧透一下,后续有时间更新一下LaTex公式吧,最好整理个表格,要不然一个个的公式太麻烦了。
二、往期回顾
课题学习(一)----静态测量
课题学习(二)----倾角和方位角的动态测量方法(基于磁场的测量系统)
课题学习(三)----倾角和方位角的动态测量方法(基于陀螺仪的测量系统)



![达梦数据库 视图 错误 [22003]: 数据溢出](https://img-blog.csdnimg.cn/f04fddd63863480a8380001d0c51805a.png)