目录
一、为什么需要位置编码
二、位置编码分类
1.表格型
2.函数型
三、Transformer的位置编码
1.位置编码应有的特点
2.Transformer的位置编码公式
3.三角函数
4.线性相关
5.相对位置关系
四、总结
一、为什么需要位置编码
在Transformer出现以前,NLP任务大多是以RNN、LSTM为代表的循环处理方式,即一个token一个token的输入到模型当中。模型本身是一种顺序结构,天生就包含了token在序列中的位置信息。但是这种模型有很多天生的缺陷,比如:
1.会出现“遗忘”的现象,无法支持长时间序列,虽然LSTM在一定程度上缓解了这种显现,但是这种缺陷仍然存在;
2.句子越靠后的token对结果的影响越大;
3.只能利用上文信息,不能获取下文信息;
4.计算的时间复杂度比较高,循环网络是一个token一个token的输入的,也就是句子有多长就要循环多少遍;
为了解决上述问题,Transformer出现了,Transformer将一哥token序列一次性输入到模型,不使用循环的形式。因为是一次性接收所有token作为输入进行并行处理,“遗忘”的问题没有了、所有的token都一视同仁了、上下文的信息能同时获取到、时间复杂度也降下来了。但是这又出现了新的问题,因为所有token一视同仁了,模型就没有办法知道每个token在句子中的相对和绝对的位置信息,而位置关系对于NLP任务来说是有着决定性影响的。比如下面的两句话token完全一样,但含义截然相反:
1.我把小姐姐按在地上摩擦
2.小姐姐把我按在地上摩擦
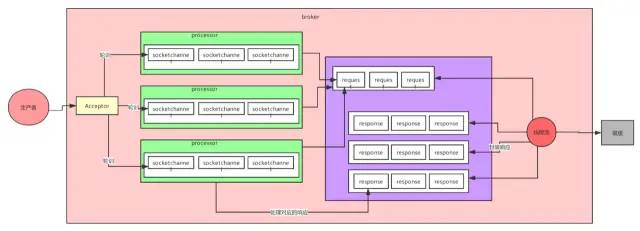
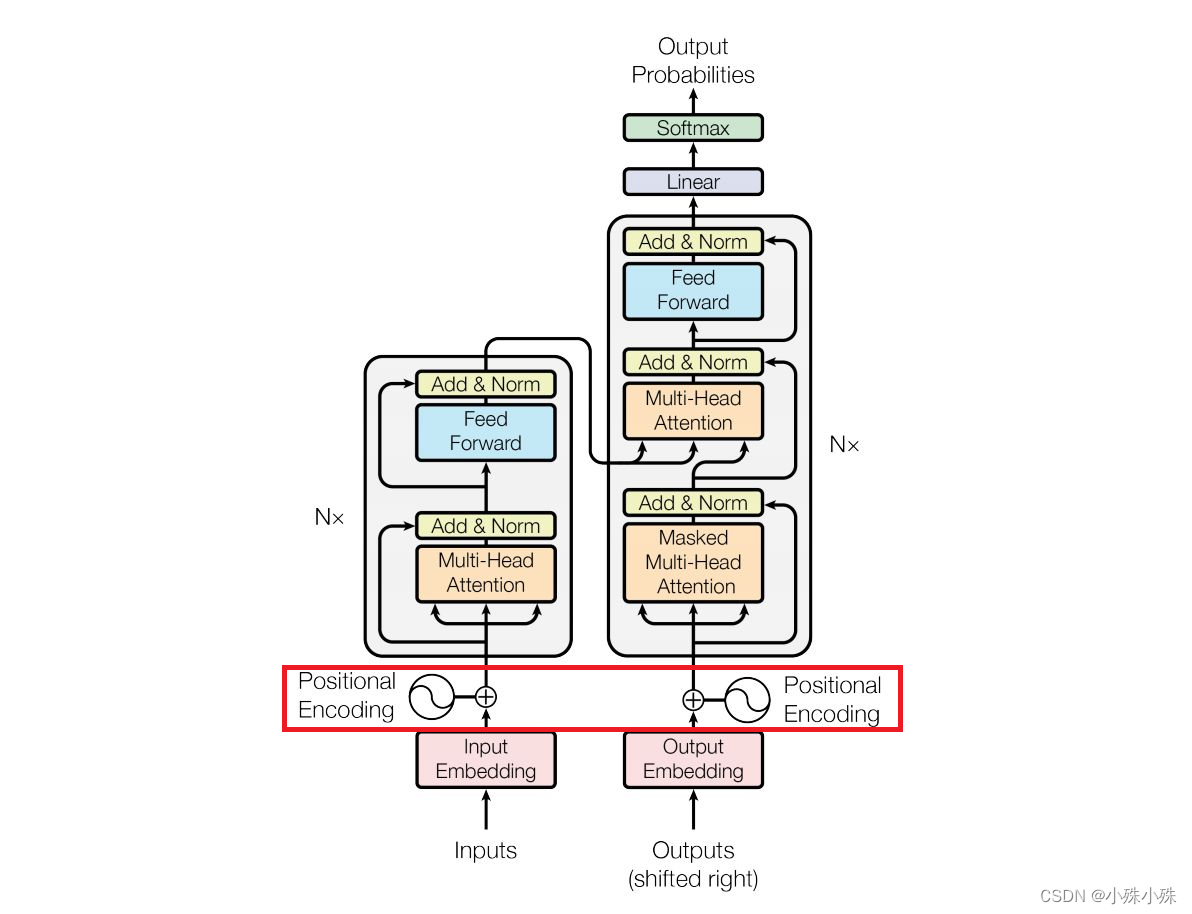
为了解决这个问题,Transformer把token的顺序信号加到词向量上帮助模型学习这些信息,这就位置编码(Positional Encoding)。下面这张图不用解释,大家再熟悉不过,接下来的内容不会涉及Self-Attention等牛逼的创新设计,只讨论位置编码,也就是红框的内容。
二、位置编码分类
位置编码用来标记token的前后顺序,总的来说,位置编码分为两个类型:表格型和函数型。
1.表格型
表格型位置编码就是建立一个长度为L的词表,按词表的长度来分配位置id。
最简单的想法就是从1开始向后排列,我们使用单字分词,如:
我 把 小 姐 姐 按 在 地 上 摩 擦
1 2 3 4 5 6 7 8 9 10 11
但是这种方式存在很大的问题,句子越长,后面的值越大,数字越大说明这个位置占的权重也越大,这样的方式无法凸显每个位置的真实的权重。
当然可以将上述编码进行归一化然后组成等差数列,但是这种方式也有问题,当句子长度不一样,每个位置的编码尺度不同,也就是说不同长度的句子,同一位置的编码是不一样的,如下面两句话:
我 把 小 姐 姐 按 在 地 上 摩 擦
0.09 0.18 0.27 0.36 0.45 0.54 0.63 0.72 0.81 0.9 0.99
看 你 往 哪 跑
0.2 0.4 0.6 0.8 1.0
2.函数型
函数型位置编码通过输入token的位置信息,得到相应的位置编码。这种方式并不使用上述绝对位置关系,而是使用相对位置的关系。
可以看到,使用相对位置的方法,我们可以清晰的知道单词之间的距离远近的关系,单独看某一个token的位置编码可能不知所谓,但是放在整个token序列中,就能表征token的相对位置关系。
比如下面这句话,我站在“按”字的位置,计算其它字距离“按”的相对距离,有正负可以区分前后:
我 把 小 姐 姐 按 在 地 上 摩 擦
-5 -4 -3 -2 -1 0 1 2 3 4 5
上面的句子只是一个演示,真实情况不会是这样。我要说明的是,相对位置编码需要线性相关,Transformer的位置编码就属于这种类型。
三、Transformer的位置编码
1.位置编码应有的特点
好的位置编码应该有如下特点:
1.每个时间步都有唯一的编码。
2.在不同长度的句子中,两个时间步之间的距离应该一致。
3.模型不受句子长短的影响,并且编码范围是有界的。(不会随着句子加长数字就无限增大)
4.同一时间序列中,每个连续的编码应该是等步长的,即线性相关的。
5.位置编码应该能表示token的绝对或相对位置关系。
下面我们就来看一下Transformer的位置编码,是否符合上面几点要求。
2.Transformer的位置编码公式
使用正余弦函数表示绝对位置,通过两者乘积得到相对位置:
(1)
(1)
其中PE表示位置编码;表示一句话中token的位置;每个token的位置编码是一个向量(或者叫embedding),i表示这个向量中每个元素的index;
表示位置编向量的维度。
式1,其实是一个式子,看起来非常复杂,写的直观一点是下面这个样子:
(2)
其中,可以看到,每个位置编码向量都是sin和cos交替。
3.三角函数
从式(2)中可以发现Transformer的位置编码使用了三角函数,三角函数是周期函数,那为什么要把每个维度设计成周期形式呢,可以看下面这个图,二进制格式表示一个数字:
| 十进制 | 二进制 | |||
| 0 | 0 | 0 | 0 | 0 |
| 1 | 0 | 0 | 0 | 1 |
| 2 | 0 | 0 | 1 | 0 |
| 3 | 0 | 0 | 1 | 1 |
| 4 | 0 | 1 | 0 | 0 |
| 5 | 0 | 1 | 0 | 1 |
| 6 | 0 | 1 | 1 | 0 |
| 7 | 0 | 1 | 1 | 1 |
| 8 | 1 | 0 | 0 | 0 |
| 9 | 1 | 0 | 0 | 1 |
| 10 | 1 | 0 | 1 | 0 |
| 11 | 1 | 0 | 1 | 1 |
| 12 | 1 | 1 | 0 | 0 |
| 13 | 1 | 1 | 0 | 1 |
| 14 | 1 | 1 | 1 | 0 |
| 15 | 1 | 1 | 1 | 1 |
可以看到以列为单位,不同位置上的数字都会出现0、1的交替变化。规律是第i位置上第个数据交替一次。比如第0列(右面数第一列)是每1次都切换,第1列(右面数第二列)是每两次切换。但是在浮点数的世界中使用二进制值是对空间的浪费,所以我们可以用正弦函数代替。事实上,正弦函数也能表示出二进制那样的交替。随着波长的变长,带来的是数据变化的变慢,就如同上面的提到的。
Transformer的位置编码选择三角函数的官方解释是这样的:
位置编码的每个维度都对应于一个正弦曲线。波长形成一个从2π到10000·2π的几何轨迹。我们之所以选择这个函数,是因为我们假设它可以让模型很容易地通过相对位置进行学习,因为对于任何固定的偏移量k,PEpos+k都可以表示为PEpos的线性函数。
也就是说,每个维度都是波长不同的正弦波,波长范围是2π到10000·2π,选用10000这个比较大的数是因为三件函数式有周期的,在这个范围基本上,就不会出现波长一样的情况了。然后谷歌的科学家们为了让PE值的周期更长,还交替使用sin/cos来计算PE的值,就得到了最终的公式(1)。
下图可以比较清晰的表现这过程。相同颜色的是同一个token的词向量,为了方便展示,波形图只使用sin,而且波形图只是展示使用,并不是实际波形图:

可以看到,每个维度(即每一行)都是三角函数的波形,随着pos的增加,波长越来越长,这就很好的实现了低位变化快、高位变化慢的情况。那每个pos内(即每一列)的元素是否为线性相关呢?
4.线性相关
我们知道某一个token的位置是pos,如果某一个token表示为 pos+k ,那就表明这个位置距上一个token为k。
如果这时我们需要看看一个位置pos和pos+k 这两个token的关系。按照位置编码的的公式,我们可以计算pos+k 的位置编码,其结果如下:
(3)
(3)
因为
(4)
(4)
所以
(5)
(5)
将式(1)中的用
代替,得到:
(6)
(6)
将式(6)带入式子(5),得到:
(7)
(7)
因为k是一个常数,所有上面公式中sin() 和cos() 的计算值也是常数,可以表示为:
(8)
(8)
这样,就可以将写成矩阵乘法的形式:
(9)
至此可以发现,位置 pos的编码与位置pos+k的位置编码是线性关系。
那么问题来了,上面的推导过程可以看到线性关系,那怎么表示每个token的相对距离关系呢?
5.相对位置关系
我们将和
相乘 (两个向量的内积),可以得到如下结果:
(10)
我们发现相乘后的结果为一个余弦的加和。这里影响值的因素就是k 。如果两个token的距离越大,也就是K越大,根据余弦函数的性质可以知道,两个位置的PE相乘结果越小。这样的关系可以得到,如果两个token距离越远则乘积的结果越小,所以位置编码可以表示相对位置关系。
四、总结
问我们上面提到了位置编码应该有的特点,我们再总结一下,Transformer的位置编码简称PE:
1.每个时间步都有唯一的编码:根据公式(1),是确定的,根据pos和i能计算出确定的值,这一点无疑是符合的;
2.在不同长度的句子中,两个时间步之间的距离应该一致:根据公式(1),(词向量的长度)是一个定值,原版Transform的512,所以就算输入句子长度不一样,到计算编码这一步,两个时间步之间的距离也是一致的;
3.编码范围是有界的。(不会随着句子加长数字就无限增大):PE使用三角函数,振幅是1,所以范围是[-1,1];
4.同一时间序列中,每个连续的编码应该是等步长的,即线性相关的:根据上一节的推导过程可以证明;
5.位置编码应该能表示token的绝对或相对位置关系:任意两个位置的token距离与PE内积结果成反比,真很好的反映了token的相对位置关系。
就简单介绍到这里,关注不迷路(*^▽^*)