自动驾驶技术是现代汽车工业中的一项革命性发展,它正在改变着我们对交通和出行的理解。本文将介绍自动驾驶技术的基础知识,包括其概念、历史发展、分类以及关键技术要素。

1. 自动驾驶概念
自动驾驶是一种先进的交通技术,它允许汽车在没有人类干预的情况下完成驾驶任务。这意味着车辆可以自动执行加速、制动、转向以及遵循交通规则等任务,而无需驾驶员的操控。自动驾驶技术的最终目标是实现完全自动化,让车辆能够在各种道路和天气条件下安全地行驶。
2. 自动驾驶技术的历史发展
自动驾驶技术的发展可以追溯到几十年前。早期的自动驾驶系统主要是基于机械和电子技术,用于辅助驾驶员的操控,例如巡航控制和自动泊车系统。然而,随着计算机科学和人工智能的发展,自动驾驶技术取得了巨大进步。
2004年,美国国防高级研究计划局(DARPA)举办了第一个“无人驾驶挑战赛”,这是一个里程碑式的事件,激发了自动驾驶技术的研究和发展。在随后的几年里,许多科技公司和汽车制造商开始投入大量资金和资源,致力于推动自动驾驶技术的商业化。
3. 自动驾驶的分类
自动驾驶技术根据其自主性和能力水平可以分为不同级别,前边的文章我们对这一块有详细的讲解,通常采用L0到L5的分类系统:

L0级是完全的手动驾驶, 驾驶员要完成汽车的全部操控操作。L0级别并不意味着车辆完全没有智能化辅助,依然可以配备一些辅助驾驶的保护系统,如刹车辅助、盲区监测等。但这些功能对驾驶过程影响很小,驾驶员始终要全程参与驾驶。目前市面上的大多数车型仍属于L0级。
L1级是辅助驾驶级别,可以协助驾驶员完成一些简单和重复的驾驶操作。典型的L1级功能有自适应巡航系统,可以控制车辆的速度;还有车道保持系统,可以辅助控制方向。这些功能可以减轻驾驶员的部分工作量,但驾驶员仍需全程参与驾驶,随时做好接管准备。
L2级是部分自动驾驶,此时车辆可以同时控制车速和方向,完成一些基本的驾驶任务,但驾驶员仍需监控周围环境,随时接管车辆。典型的L2功能有自适应巡航搭配车道保持、自动泊车和自动变道等。目前,多数品牌推出的所谓自动驾驶功能,实际上大多数处于L2级水平。
L3级是有条件的自动驾驶,它可以在特定条件下实现自动驾驶,如高速公路或专用道路上。在这种条件下,L3级自动驾驶可以完成所有驾驶任务和周边环境监控,驾驶员可以暂时不参与驾驶。但一旦自动系统发出接管请求,驾驶员就必须立即接手车辆。目前,还没有量产车型达到真正的L3级水平。
L4级是高度自动驾驶,它可以在特定区域或环境内实现完全的自动驾驶,无需人工接管。与L3级不同,L4级系统在预定操作域内可以处理突发情况,不需要驾驶员参与。但L4也存在环境限制,无法达到随时随地的完全自动驾驶。目前也还没有车型实现真正的L4级自动驾驶。
L5级代表完全的自动驾驶,整个行车过程全由车辆自己完成,无需任何人工干预。理论上L5级自动驾驶汽车不再需要方向盘和 pedal,可以在任何时间任何地点以任何速度进行自动驾驶,完全实现无人驾驶。但由于技术和法规限制,真正做到L5级自动驾驶还需时日。
目前,大多数商用自动驾驶系统还处于L2和L3级别,而L4和L5级别的自动驾驶仍然在研发和测试阶段。
4. 自动驾驶的关键技术要素
自动驾驶技术的实现依赖于多个关键技术要素,包括:
4.1 传感器技术
传感器是自动驾驶系统的眼睛和耳朵,它们用于感知和理解车辆周围的环境。常见的自动驾驶传感器包括:

-
摄像头: 用于捕捉道路上的图像,帮助识别其他车辆、行人、道路标志和交通信号等。
-
雷达: 通过发射无线电波并测量其反射来检测周围物体的位置和速度。不同类型的雷达可以提供不同范围和分辨率的数据。
-
激光雷达 (LiDAR): 使用激光束来创建高分辨率的三维地图,以获取关于周围环境的精确深度信息。
-
超声波传感器: 用于检测车辆周围的近距离障碍物,如停车时的距离感知。
这些传感器共同工作,为自动驾驶系统提供丰富的环境感知数据,以便系统能够了解周围世界。
4.2 软件和算法
软件和算法是自动驾驶技术的核心。它们负责处理传感器数据、感知环境、做出决策和控制车辆。以下是软件和算法的主要任务:
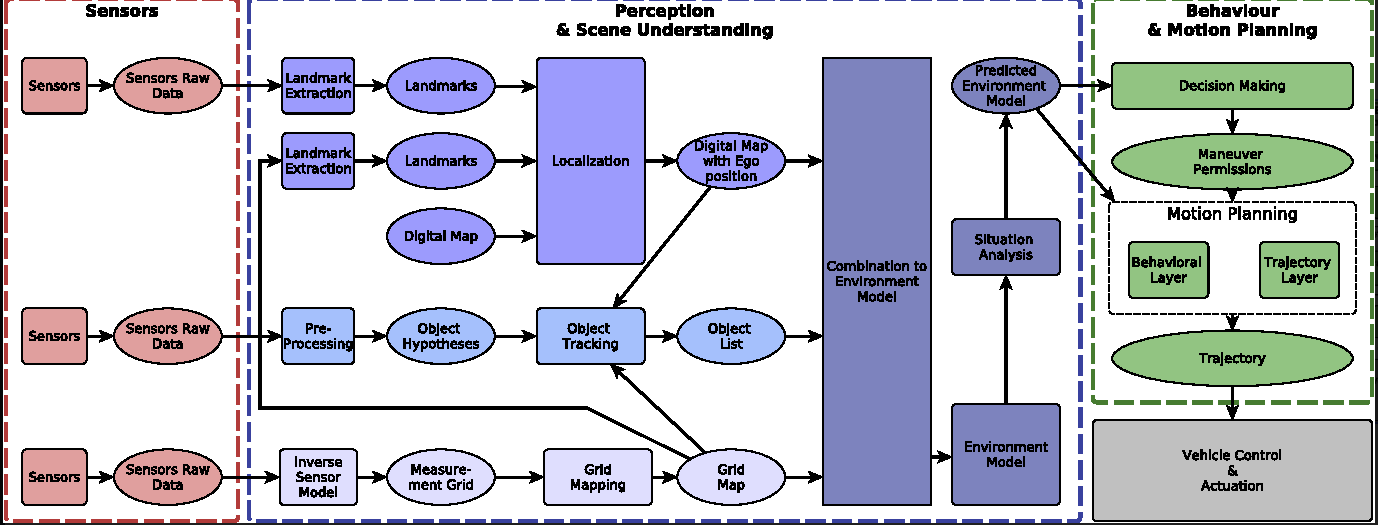
-
感知: 通过图像处理、目标检测和物体跟踪等技术,将传感器数据转化为对车辆周围环境的理解。这包括检测其他车辆、行人、道路标志、车道线等。
-
定位: 确定车辆在地图上的精确位置,通常使用全球定位系统(GPS)和惯性测量单元(IMU)等传感器数据。
-
路径规划: 基于环境感知和目标,规划车辆的行驶路径,确保安全和有效的驾驶。
-
控制: 执行加速、制动、转向等控制命令,以实现规划的驾驶路径。
-
决策制定: 根据环境条件和车辆状态,做出决策,如超车、让路、停车等。
这些软件和算法必须能够在不同的道路和天气条件下可靠运行,并且考虑到各种潜在情况,包括紧急情况和其他交通参与者的行为。
4.3 控制系统
控制系统负责将决策转化为车辆的物理动作。它涉及到控制车辆的加速、制动、转向和维持车辆的稳定性。自动驾驶车辆通常配备了电子稳定控制系统(ESC)等技术,以确保在各种情况下保持车辆的稳定性和安全性。
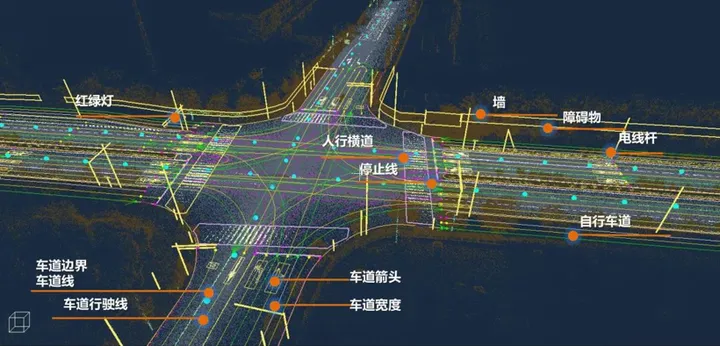
4.4 高精度地图
高精度地图是自动驾驶系统的重要组成部分。这些地图不仅包含基本的地理信息,还包括车道标记、交通信号、道路坡度等详细信息。自动驾驶车辆使用这些地图来定位自己在道路上的位置,并与传感器数据进行校准。这些地图通常由专业测绘公司创建,并需要定期更新以反映道路的变化。
综合来说,自动驾驶技术的关键技术要素密切合作,使车辆能够感知、理解和应对复杂的交通环境。这些技术要素的不断发展和改进将推动自动驾驶系统更加安全、可靠和普及化。然而,自动驾驶技术的成功也依赖于法规、伦理、安全标准和大规模测试等因素的综合考虑。
总结
自动驾驶技术的不断发展和改进将继续推动我们朝着实现更安全、高效和便捷的交通系统迈进。然而,同时也伴随着法律、伦理和安全等方面的挑战,需要不断解决和调整。在未来,我们可以期待看到自动驾驶技术在道路上的广泛应用,改变我们的出行方式和交通体验。路上的广泛应用,改变我们的出行方式和交通体验。