目录
- 0. 论文及代码
- 1. 标定原理
- 2. 拟合平面
- 3. 标定roll/pitch/height
- 4. 标定yaw
- 4.1 理解从B_spline拟合的轨迹中得到vehicle航向
- 5. 精度
0. 论文及代码
参考论文:SensorX2car: Sensors-to-car calibration for autonomous driving in road
scenarios
参考代码:lidar2car
1. 标定原理
①在车辆行驶中,lidar 可以观测到地面,我们通过提取点云中的地面并拟合平面方程,根据平面方程法向量与(0,0,1)之间的旋转可以得到 lidar 和车身之间的 roll/pitch;
②求解(0,0,0)点到提取地面的距离再减去轮胎半径得到 lidar 到车身后轴中心的高度;
③ 得到 roll/pitch 后将点云与地面对齐,然后通过点云配准(或者SLAM算法)得到 lidar 的 DR,根据此 DR 轨迹 进行 B 样条曲线拟合并求导得到车体坐标系下的航向角变化
④上述航向角与 DR 中 lidar 的 航向作差,即 lidar 系和车体系之间的 yaw,至此 lidar in vehicle 的 roll/pitch/height/yaw 全部标定成功。
2. 拟合平面
拟合平面的pipline如下:首先就是为了减少计算量,对激光雷达观测到的点云进行滤波操作。然后利用ransac算法拟合出initial plane,接着通过微调平面参数使其能覆盖更多的“地面内点”。最后根据“地面内点”通过SVD分解方法得到平面的法向量。

/* @brief: plane params: normal=[a,b,c]; intercept= d;
ax + by + cz + d = 0;
*/
struct PlaneParam {
PlaneParam() {}
PlaneParam(const Eigen::Vector3d& n, double i) : normal(n), intercept(i) {}
Eigen::Vector3d normal;
double intercept;
};
/* @brief: ground extraction object */
class GroundExtractor {
public:
GroundExtractor() = default;
~GroundExtractor() = default;
/* @brief: ground extraction using random ransac algorithm,
* aim at the slaver lidar*/
bool RandomRansacFitting(const PointCloudPtr in_cloud,
PointCloudPtr g_cloud,
PointCloudPtr ng_cloud,
PlaneParam * plane);
private:
size_t RandIndex(size_t range); // Random point selection
bool CalArea(const PointType& p1,
const PointType& p2,
const PointType& p3,
double* area); // Make sure the three points you pick fit into a triangle
// In ransac, normal vectors are calculated based on randomly selected planes
bool FittingPlane(PointCloudPtr in_cloud, PlaneParam *plane);
// Solving plane normal vector by SVD decomposition
bool FittingPlaneMesh(const PointCloudPtr in_cloud, PlaneParam *plane);
// Fine-tune the plane parameters to include more inliers
bool RandomSearchPlane(const PointCloudPtr in_cloud, PlaneParam &best_plane, int &max_inlier_points,
double n1_scope, double n2_scope, double n3_scope, double i_scope, int iteration_times);
private:
/* @breif ransac params
*/
const int rr_iter_times_ = 5;
const int rr_max_rand_iters_ = 500;
const double rr_gpoints_rate_ = 0.4;
const double rr_min_area_thre_ = 0.25;
const double rr_fit_dist_thre_ = 0.1;
};
3. 标定roll/pitch/height
得到平面方程之后,我们可以计算激光雷达原点到拟合平面的距离,此距离就是lidar到地面的高度。同时,我们可以根据平面法向量和向量[0,0,1]计算地面与lidar的旋转(roll和pitch)。

注意: 这一步只能得到roll,pitch。
Eigen::Vector3d master_z(0, 0, 1);
Eigen::Vector3d rot_axis = master_gplane.normal.cross(master_z);
rot_axis.normalize();
double alpha = -std::acos(master_gplane.normal.dot(master_z));
// extrinsic: plane to master lidar
Eigen::Matrix3d R_mp;
R_mp = Eigen::AngleAxisd(alpha, rot_axis);
Eigen::Vector3d t_mp(0, 0,
-master_gplane.intercept / master_gplane.normal(2));
Eigen::Matrix4d T_pm = Util::GetMatrix(t_mp, R_mp).inverse();
double roll = Util::GetRoll(T_pm);
double pitch = Util::GetPitch(T_pm);
/* avoid using it: matrix.block<3, 3>(0, 0).eulerAngles(0, 1, 2)[0];*/
static double GetRoll(const Eigen::Matrix4d& matrix) {
Eigen::Matrix3d R = matrix.block<3, 3>(0, 0);
Eigen::Vector3d n = R.col(0);
Eigen::Vector3d o = R.col(1);
Eigen::Vector3d a = R.col(2);
double y = atan2(n(1), n(0));
double r = atan2(a(0) * sin(y) - a(1) * cos(y),
-o(0) * sin(y) + o(1) * cos(y));
return r;
}
static double GetPitch(const Eigen::Matrix4d& matrix) {
Eigen::Matrix3d R = matrix.block<3, 3>(0, 0);
Eigen::Vector3d n = R.col(0);
double y = atan2(n(1), n(0));
double p = atan2(-n(2), n(0) * cos(y) + n(1) * sin(y));
return p;
}
4. 标定yaw
得到激光雷达到地面的roll和pitch之后,就可以讲激光点云与地面对齐,然后我们使用SLAM算法或者点云配准方法,得到lidar的DR轨迹[
X
i
,
Y
i
,
Y
a
w
i
X_i, Y_i, Yaw_i
Xi,Yi,Yawi]。
另一方面,我们可以根据上面的[
X
i
,
Y
i
X_i, Y_i
Xi,Yi]进行B_spline拟合出一条轨迹。对此轨迹每个时刻求偏导,可以得到车辆各时刻的航向变化。


已知lidar的航向变化以及车辆的航向变化,他们两个应该是拥有一个航向偏差同步变化的。于是两者之差即是lidar与vehicle的航向外参。
bool YawCalib::GetYawSegs(const DataTable &sample_x, const DataTable &sample_y, std::vector<DataTable> &samples_yaw){
BSpline bspline_x = BSpline::Builder(sample_x).degree(bspine_degree_).smoothing(BSpline::Smoothing::PSPLINE).alpha(0.03).build();
BSpline bspline_y = BSpline::Builder(sample_y).degree(bspine_degree_).smoothing(BSpline::Smoothing::PSPLINE).alpha(0.03).build();
int discarded_nums = int(pose_num_ * 0.05);
DataTable tmp_yaw;
int last_t = 0;
double last_yaw = 0;
for (int i = discarded_nums; i < pose_num_ - discarded_nums; i += time_gap_)
{
DenseVector t(1);
t(0) = i;
double dx = bspline_x.evalJacobian(t)(0, 0);
double dy = bspline_y.evalJacobian(t)(0, 0);
double ddx = bspline_x.evalHessian(t)(0, 0);
double ddy = bspline_y.evalHessian(t)(0, 0);
double cur_x = fabs(ddx) / pow(1 + dx * dx, 1.5);
double cur_y = fabs(ddy) / pow(1 + dy * dy, 1.5);
// delete unmoving points
if (dx * dx + dy * dy < 1e-3)
continue;
// detele points with large curvature
if (cur_x > 0.015 || cur_y > 0.015)
continue;
double yaw = atan2(dy, dx);
t(0) = i + bspine_degree_;
if(tmp_yaw.getNumSamples() != 0 && i - last_t > time_gap_ * 5)
{
if(tmp_yaw.getNumSamples() > 20)
{
samples_yaw.push_back(tmp_yaw);
}
tmp_yaw = DataTable();
}
if(tmp_yaw.getNumSamples() != 0 && fabs(yaw - last_yaw) > M_PI){
if(yaw - last_yaw > M_PI) {
yaw -= 2 * M_PI;
}
else if(yaw - last_yaw < -M_PI) {
yaw += 2 * M_PI;
}
}
tmp_yaw.addSample(t, yaw);
last_yaw = yaw;
last_t = i;
}
if(tmp_yaw.getNumSamples() > 20)
{
samples_yaw.push_back(tmp_yaw);
}
return true;
}
4.1 理解从B_spline拟合的轨迹中得到vehicle航向
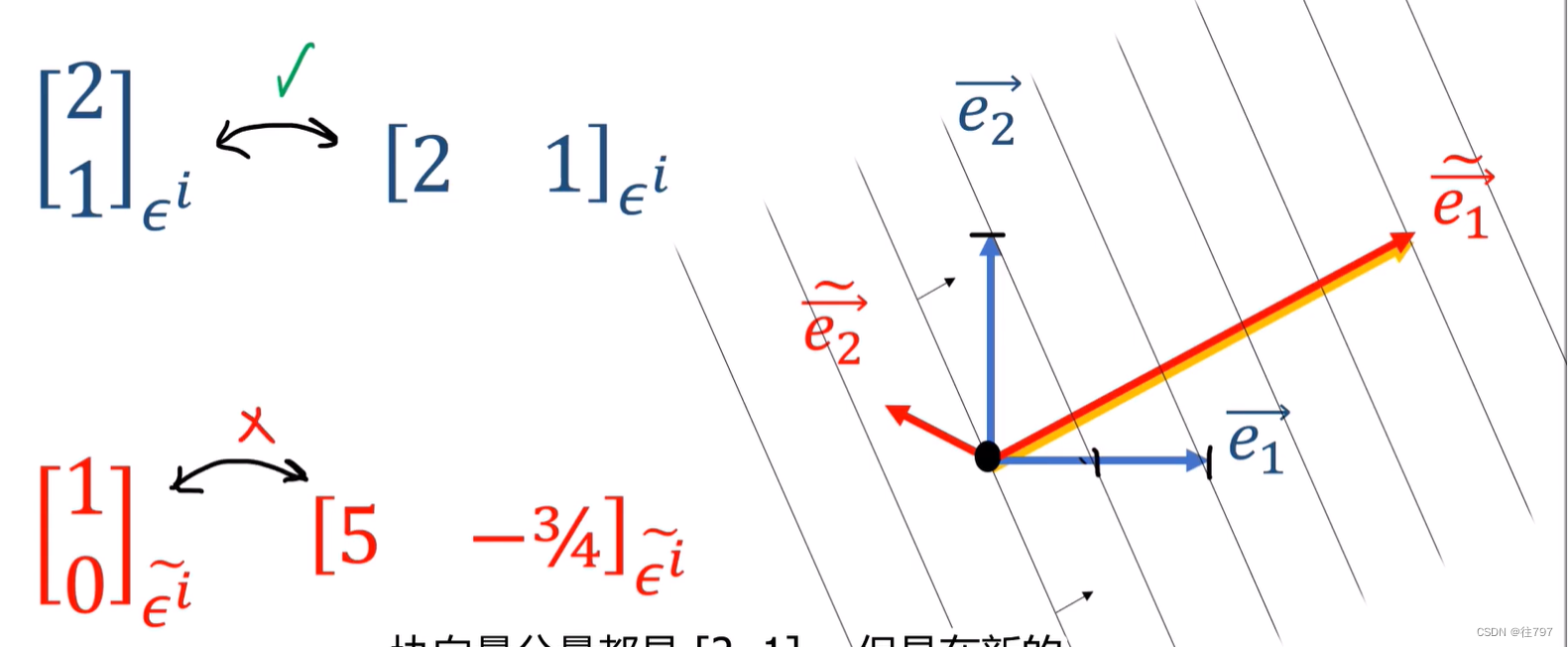
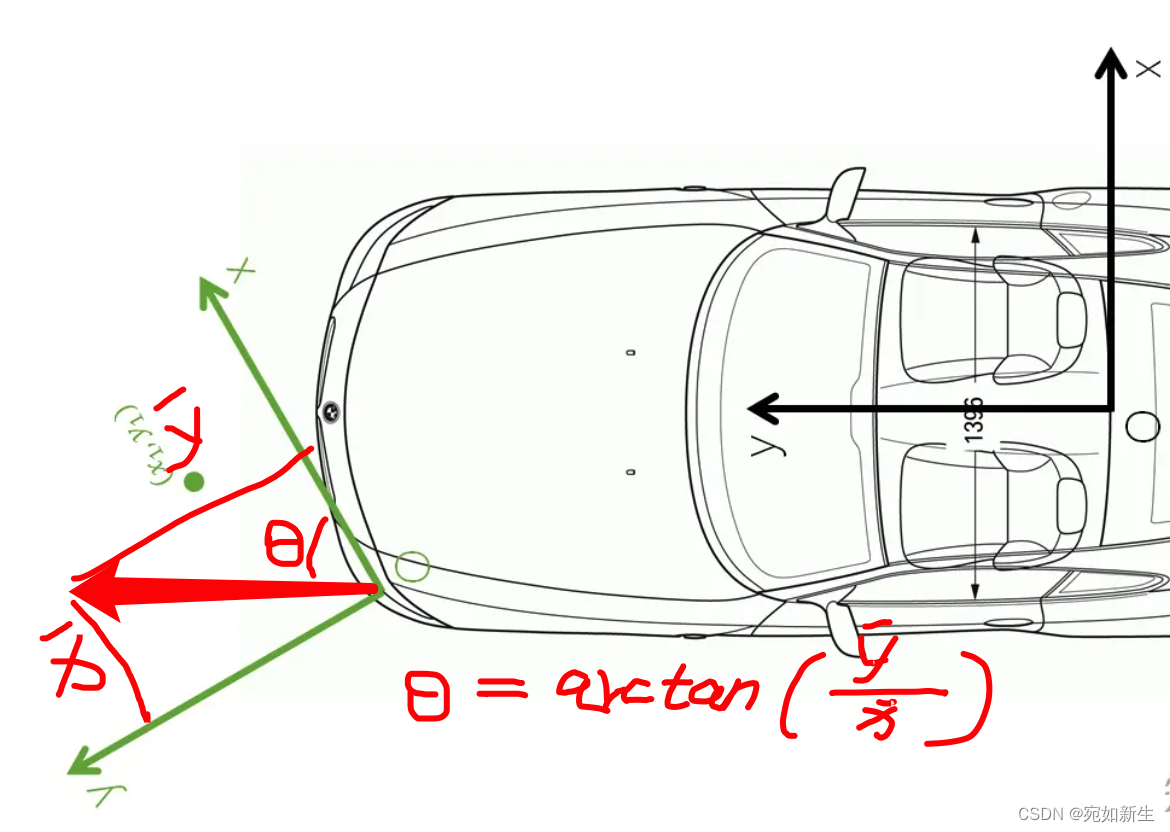
假设车辆坐标系的前向为Y,车辆右侧指向为X,天向为Z;

假设下图中绿色为激光雷达的坐标系。

当车辆直线行驶时,我们通过SLAM算法或者点云匹配算法得到的激光雷达位姿[
X
i
,
Y
i
,
Y
a
w
i
X_i, Y_i, Yaw_i
Xi,Yi,Yawi]中的
Y
a
w
i
=
0
Yaw_i = 0
Yawi=0,但是根据激光雷达位置[
X
i
,
Y
i
X_i, Y_i
Xi,Yi]进行B_spline拟合的曲线求偏导得到的角度表示vehicle的航向在以激光雷达为参考系下的表示,它不为0。
5. 精度
根据工作中的开发情况来看,旋转精度可以达到0.01度(其中yaw角标定依赖SLAM算法或者点云配准精度),高度精度可以达到0.05m。