1.下载数据集
#1.下载数据集:
mkdir /home/tang/bagfiles
#2.开始二维建图
cd /home/tang/carto_ws/cartographer_detailed_comments_ws/install_isolated/
source install_isolated/setup.bash
rospack profile #新装的包索引地址存在ros的环境里
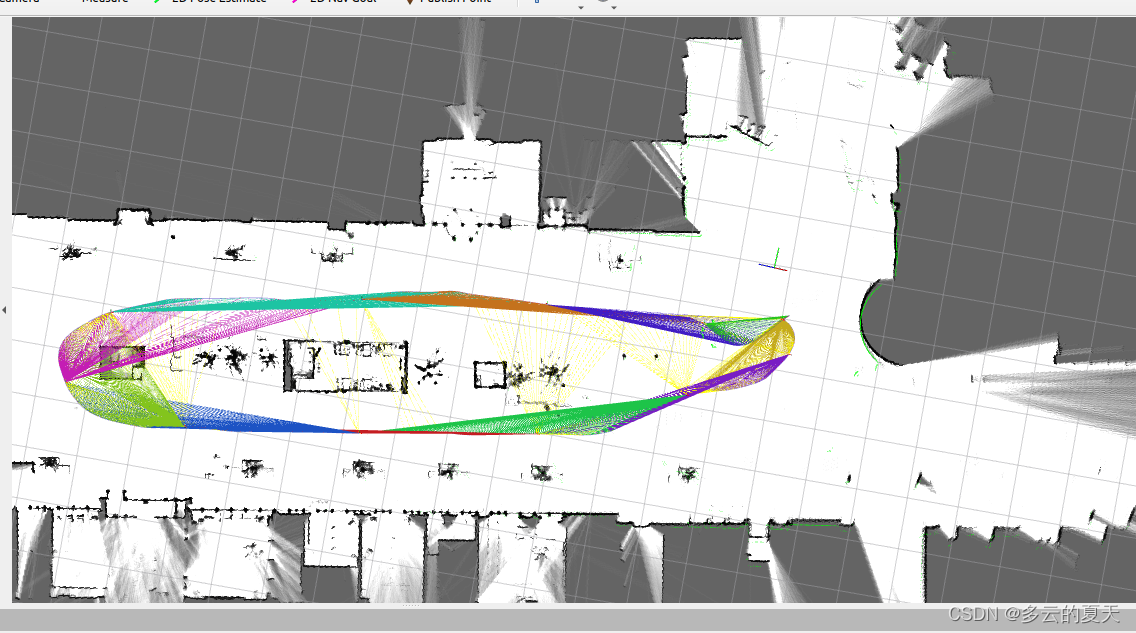
roslaunch cartographer_ros lx_rs16_2d_outdoor.launch
#3.lx_rs16_2d_outdoor.launch
文件存在的目录: /home/tang/carto_ws/cartographer_detailed_comments_ws/src/cartographer_ros/cartographer_ros/launch/cartographer_ros/
参数:
<!-- bag的地址与名称 -->
<arg name="bag_filename" default="$(env HOME)/bagfiles/rslidar-outdoor-gps-notf.bag"/>
$(env HOME)相对路径的设置方式:
环境变量:
| root | tang | |
| ~./bashrc区别 | 100行 当前用户有效 | 117行 当前用户有效 |
| env命令 | 两个用户运行出来的结果完全一样 | |
| 修改/etc/profile | 所有用户有效 export HOME=/home/tang source /etc/profile | 此文件里一堆bash |
| 修改 /etc/enviroment | 所有用户有效 HOME="/home/tang" reboot | PATH的值 |
| 配置文件里的调用方式: $(env HOME) |
#1.查看环境变量
echo $PATH #命令的搜索路径
echo $HOME #用户的主工作路径
echo $LOGNAME #当前登录的用户名
echo $HOSTNAME #主机名
#2.设置临时环境变量 关闭终端时这个变量就会消失了。
export MYTESTENV=/home/tang/test # 设置变量
echo $MYTESTENV # 读取变量
env |grep MYENVTEST # 读取变量
vim /etc/profile # 打开文件 并没有写入到文件中
vim /etc/envirment # 打开文件 并没有写入到文件中
#如果要设置永久的还是要写入到文件中
#3.
保存地图:
# 保存地图
# 保存地址为终端运行命令的目录 /home/tang
rosrun map_server map_saver
map.pgm map.yaml
#如果出现没找到包map_server
sudo apt-get install ros-noetic-map-server

1.通过脚本保存2d地图:
脚本的目录: ~/carto_ws/cartographer_detailed_comments_ws/finish_slam_2d.sh
apt install ros-noetic-rqt*
plugins->introspection->Node Graph
2.通过脚本保存3d地图
查看README
~/carto_ws/cartographer_detailed_comments_ws/README.md
# 纯定位模式
roslaunch cartographer_ros lx_rs16_2d_outdoor_localization.launch3. 3d 建图
roslaunch cartographer_ros lx_rs16_3d.launch4. 通过pcl来点云可视化
apt install pcl-tools
cd ~/carto_ws/map
pcl_viewer b3_1.pcd