文章目录
- 前言
- 一、官方文档的理解
- 1.发送格式
- 2.命令地址
- 二、控制文件
- 1.c
- 2.h
- 文件
前言
使用stm32控制这个总线舵机。
舵机为总线舵机。一定要配合控制板一起用,不然只使用stm32无法控制。


一、官方文档的理解
1.发送格式
发送格式如下,其中的指令类型就说发下去以后是写入到舵机里面的,还是让舵机反馈一个东西上来。

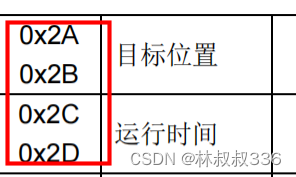
2.命令地址
写入参数第第一个字节就是下面的地址,可以从你的目标地址一直往下写,只要你说明了数据长度就行。

比如说
这里地址写的是2a,且数据长度为7也就说说在2a这个地址上还会继续往后写4个数据

2a是目标位置,那就从这个往后写,写四个,所以这个就是写入目标位置和转到目标位置时间的一个指令
二、控制文件
1.c
要注意的是当舵机数据回传的时候要有中断,我这个适合hal库的usart空闲中断,一次把数据全部接收进来。
可以把这个反馈的函数放在空闲中断回调里面。
目前反馈函数只写了当前位置。
#include "bus_servo.h"
#include "usart.h"
#include "bsp_hal_uartdma.h"
#include <stdio.h>
#include <string.h>
#define RX_MAX_BUF 8
//接收数据相关变量
uint8_t Rx_Data[8] = {0};
uint8_t Rx_index = 0;
uint8_t Rx_Flag = 0;
uint8_t RecvFlag = 0;
/* 控制总线舵机,
* id:要控制的id号,0xfe为全体控制
* value:位置值(96~4000)
* time:运行的时间,时间越小,运行越快,最小为0
* */
void bus_servo_control(uint8_t id, uint16_t value, uint16_t time)
{
if (value >= 96 && value <= 4000)
{
const uint8_t s_id = id & 0xff;
const uint8_t len = 0x07;
const uint8_t cmd = 0x03;
const uint8_t addr = 0x2a;
const uint8_t pos_H = (value >> 8) & 0xff;
const uint8_t pos_L = value & 0xff;
const uint8_t time_H = (time >> 8) & 0xff;
const uint8_t time_L = time & 0xff;
const uint8_t checknum = (~(s_id + len + cmd + addr + pos_H + pos_L + time_H + time_L)) & 0xff;
// unsigned char data[] = {0xff, 0xff, s_id, len, cmd, addr, pos_H, pos_L, time_H, time_L, checknum};
unsigned char data[11] = {0};
data[0] = 0xff;
data[1] = 0xff;
data[2] = s_id;
data[3] = len;
data[4] = cmd;
data[5] = addr;
data[6] = pos_H;
data[7] = pos_L;
data[8] = time_H;
data[9] = time_L;
data[10] = checknum;
HAL_UART_Transmit(&huart1,data,11,1000);
}
}
/* 控制舵机卸下
* id:要控制的id号,0xfe为全体控制
* value:这个值为1的时候有力
0的时候卸力
* */
void bus_servo_Unloading(uint8_t id,uint8_t value)
{
const uint8_t s_id = id & 0xff;
const uint8_t len = 0x04;//四个
const uint8_t cmd = 0x03;//写入
const uint8_t addr = 0x28;//数据地址
const uint8_t val = value ;
const uint8_t checknum = (~(s_id + len + cmd + addr + value)) & 0xff;
unsigned char data[11] = {0};
data[0] = 0xff;
data[1] = 0xff;
data[2] = s_id;
data[3] = len;
data[4] = cmd;
data[5] = addr;
data[6] = val;
data[7] = checknum;
HAL_UART_Transmit(&huart1,data,8,1000);
}
/* 写入目标ID(1~250) */
void bus_servo_set_id(uint8_t id)
{
if ((id >= 1) && (id <= 250))
{
const uint8_t s_id = 0xfe; /* 发送广播的ID */
const uint8_t len = 0x04;
const uint8_t cmd = 0x03;
const uint8_t addr = 0x05;
const uint8_t set_id = id; /* 实际写入的ID */
const uint8_t checknum = (~(s_id + len + cmd + addr + set_id)) & 0xff;
// const uint8_t data[] = {0xff, 0xff, s_id, len, cmd, addr, set_id, checknum};
unsigned char data[8] = {0};
data[0] = 0xff;
data[1] = 0xff;
data[2] = s_id;
data[3] = len;
data[4] = cmd;
data[5] = addr;
data[6] = set_id;
data[7] = checknum;
HAL_UART_Transmit(&huart1,data,8,1000);
}
}
/* 发送读取舵机位置命令 */
void bus_servo_read(uint8_t id)//读取舵机位置
{
if (id > 0 && id <= 250)
{
const uint8_t s_id = id & 0xff;
const uint8_t len = 0x04;
const uint8_t cmd = 0x02;
const uint8_t param_H = 0x38;
const uint8_t param_L = 0x02;
const uint8_t checknum = (~(s_id + len + cmd + param_H + param_L)) & 0xff;
// const uint8_t data[] = {0xff, 0xff, s_id, len, cmd, param_H, param_L, checknum};
unsigned char data[8] = {0};
data[0] = 0xff;
data[1] = 0xff;
data[2] = s_id;
data[3] = len;
data[4] = cmd;
data[5] = param_H;
data[6] = param_L;
data[7] = checknum;
HAL_UART_Transmit(&huart1,data,8,1000);
}
}
//转化接收到的值为位置数
uint16_t bus_servo_get_value(void)
{
uint8_t checknum = (~(Rx_Data[2] + Rx_Data[3] + Rx_Data[4] + Rx_Data[5] + Rx_Data[6])) & 0xff;
if(checknum == Rx_Data[7])
{
// uint8_t s_id = Rx_Data[2];
uint16_t value_H = 0;
uint16_t value_L = 0;
uint16_t value = 0;
value_H = Rx_Data[5];
value_L = Rx_Data[6];
value = (value_H << 8) + value_L;
return value;
}
return 0;
}
uint8_t get_Rx_state(void)
{
return RecvFlag;
}
int now_servo_value[6];//当前值
uint8_t callback_data[8];
int calue_ = 0;
void Uart1Rx_Handler(char *pdata, uint16_t len)//回调函数
{
if(len == 8)
{
memcpy(callback_data,pdata,8);
uint8_t checknum = (~(callback_data[2] + callback_data[3] + callback_data[4] + callback_data[5] + callback_data[6])) & 0xff;
if(checknum == callback_data[7])//校验是否正确
{
//解析出值
calue_ = (callback_data[5] << 8) + callback_data[6];
//放到当前的数组里
now_servo_value[callback_data[2]-1] = calue_;
}
}
}
2.h
#ifndef _BUS_SERVO_H_
#define _BUS_SERVO_H_
#include "main.h"
void bus_servo_control(uint8_t id, uint16_t value, uint16_t time);
void bus_servo_set_id(uint8_t id);
void bus_servo_read(uint8_t id);
uint16_t bus_servo_get_value(void);
void bus_servo_uart_recv(uint8_t Rx_Temp);
uint8_t get_Rx_state(void);
void bus_servo_Unloading(uint8_t id,uint8_t value);
void Uart1Rx_Handler(char *pdata, uint16_t len);//回调函数
#endif /* _BUS_SERVO_H_ */
文件
资料文件和程序文件