-
下载相关驱动包(激光雷达厂商应该会给出)
编译后可能会出现部分错误,以下是部分情况:
(1) 移植功能包后出现c++文件无法找到头文件的情况:解决链接 -
修改代码:(以我的雷达为例,其他可能有所不同)
(1)找到lslidar_x10_serial.launch文件
(2)修改型号和串口号

注:需要先固定串口号,防止之后动态改变
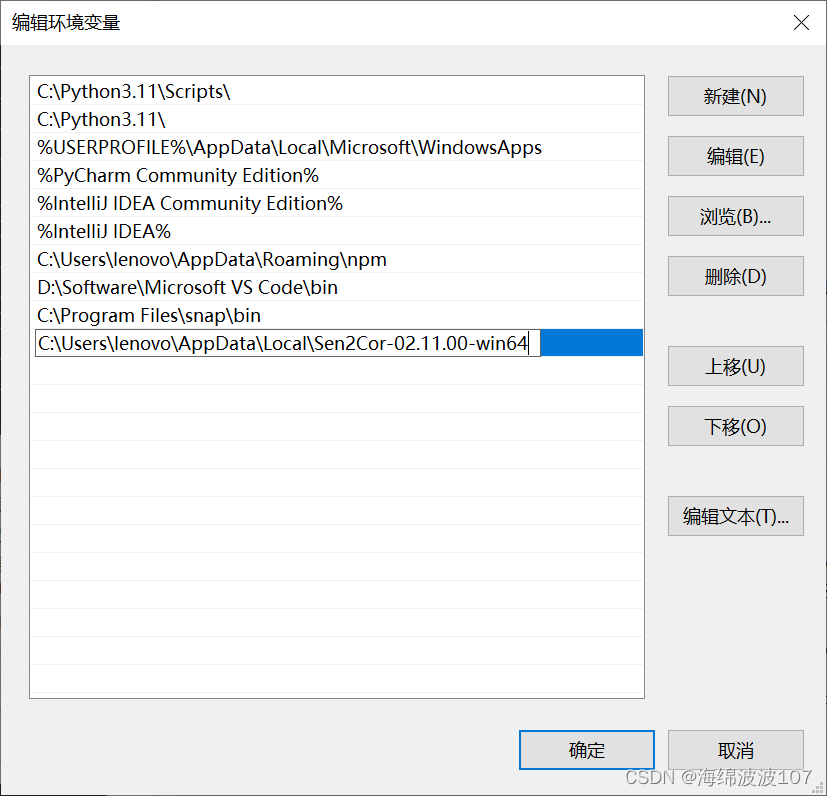
固定串口号方法 -
测试:
(1)启动launch文件:
roslaunch lslidar_x10_driver lslidar_x10_serial.launch
(2)打开rviz可视化工具
rviz
(3)设置基坐标,按左下角Add添加LaserScan组件:
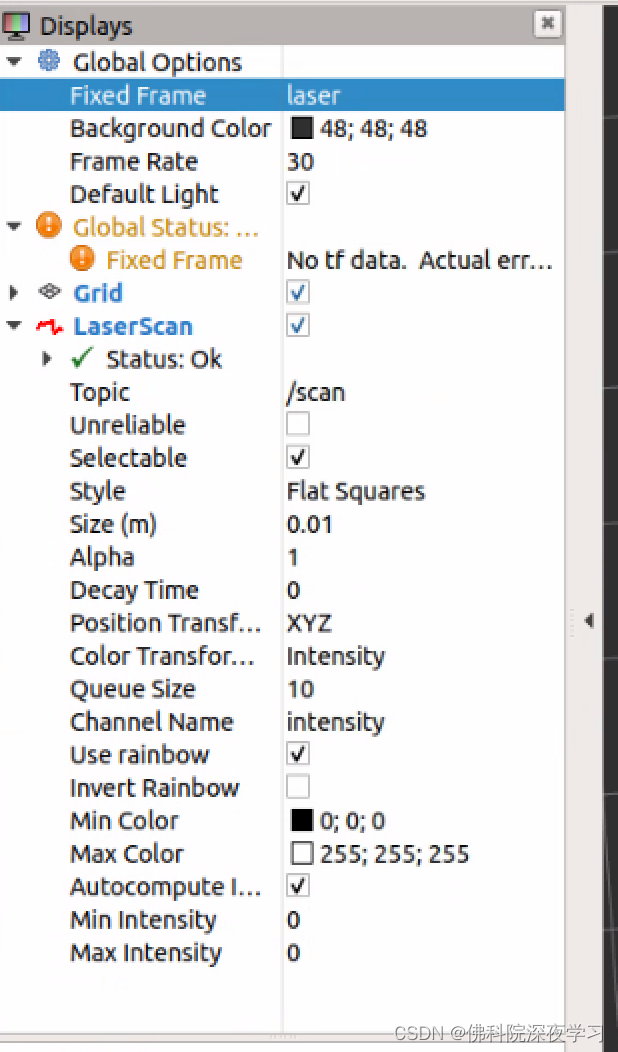
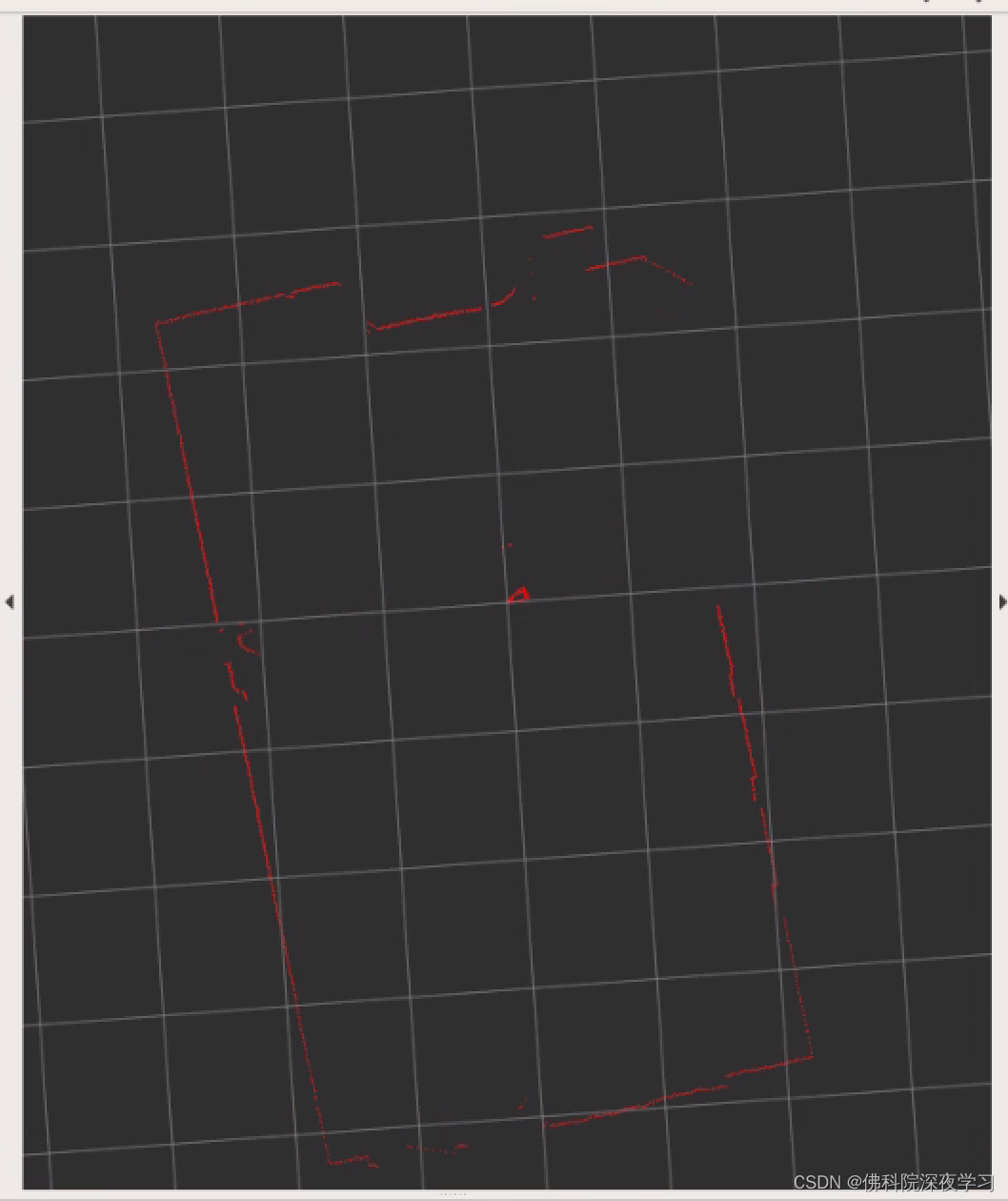
(4)目标效果:

![[QT编程系列-45]: 内存检测工具Dr.Memory在Windows上的使用实践与详解](https://img-blog.csdnimg.cn/dc8d9e9d0a60462597d1ee673ab4aa7c.png)