1.概述
超声波雷达的工作原理是通过超声波发射装置向外发出超声波,到通过接收器接收到发送过来超声波时的时间差来测算距离。
对温度敏感性,使得超声波的速度具有如下特性
或
2.超声波雷达车位探测与障碍物检测
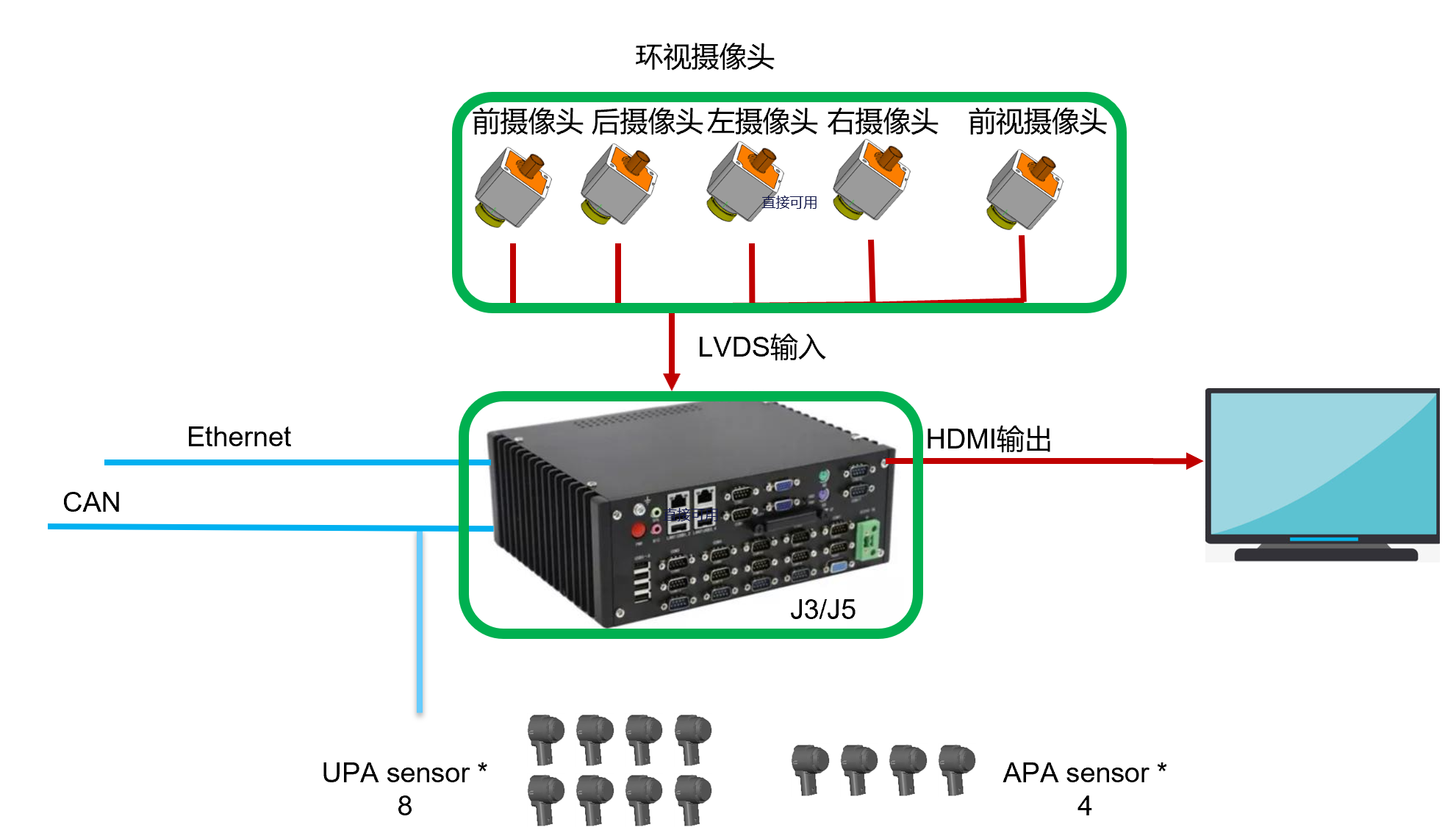
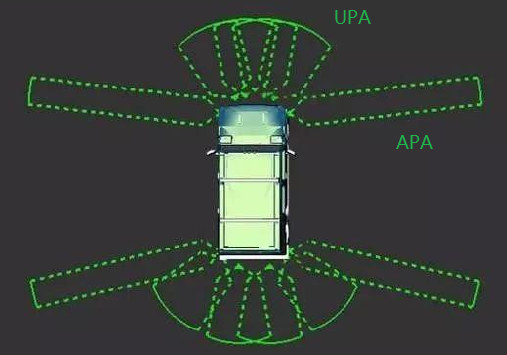
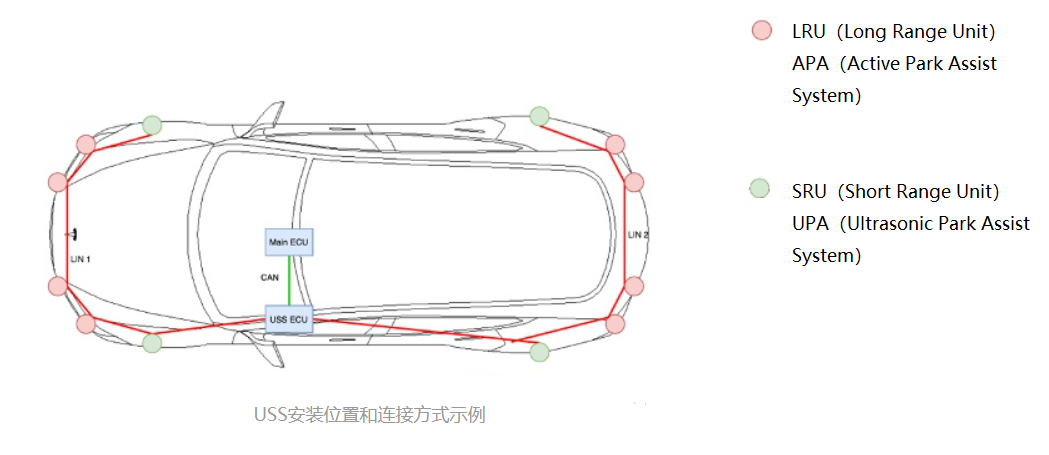
汽车超声波类装配方案多为前后向共8个UPA,左右侧共4个APA。UPA主要应用于车前后障碍物检测,APA主要应用于车侧障碍物检测。工作频率:48kHz+2kHz。
3.目标位置检测
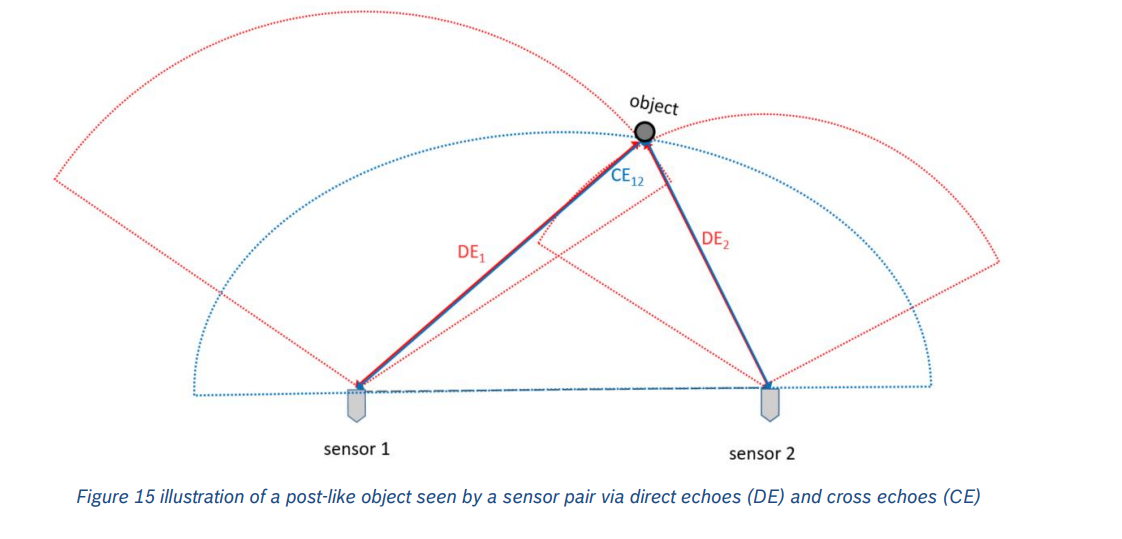
基于直接回波direct echoes得到的测量模型如下。


为简化推导过程,首先假设目标或障碍物为质点模型。最后可对原始障碍物坐标进行膨胀处理,得到障碍物的目标坐标。
step1: 获取至少两个超声波雷达探头的距离数据:
a. 距离数据包括第一超声波雷达探头检测到的DE1和CE、第二超声波雷达探头检测到的第一检测距 离和第二检测距离.
b. 每个探头可以实现自发自收、他发自收两种模式,参见下图中箭头的指向。这两种模式下检测到的距离可以称为直接回波距离DE和间接回波距离CE。
c.根据一个超声波雷达探头检测到的DE和CE、第二个超声波雷达探头检测到DE和CE,判断是否存在障碍物.
d.当存在障碍物时,判断障碍物是否处于第一超声波雷达探头和第二超声波雷达探头检测范围的重叠区域.
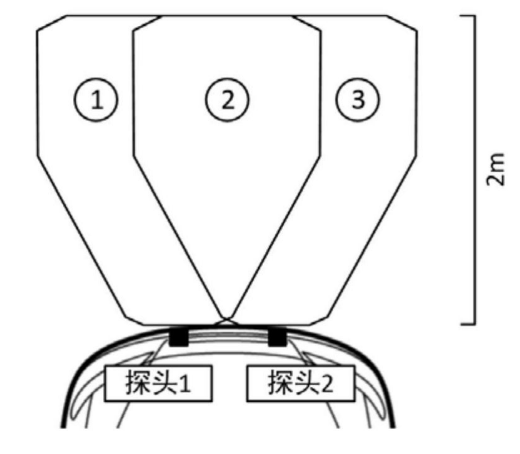
e.由于实际情况下检测距离值可能存在跳变、丢失等情况,为了保证任何情况下都能够通过这四个检测距离确定障碍物的位置区域,对分超声波雷达的检测包络模型进行分析.
f.提供的超声波雷达的检测包络模型示意 图。超声波雷达探头的检测范围可以用较简单的扇形模型表示,参见下图,扇形的弧表示该距离处的障碍物。
当障碍物存在于重叠区域时,根据第一超声波雷达探头的第一坐标、二超声波雷达探头的第二坐标,计算障碍物的原始坐标。
两探头的四个检测距离中如果只有一个探头的第一检测距离不为0,则认为该障碍物存在于非重叠区域,位置可以用扇形的弧线来表示。
只有两个探头的第一检测距离都不为0,该障碍物才存在于重叠区域内,此时可以利用公式计算障碍物的原始坐标。
给出障碍物的原始坐标计算公式如下:
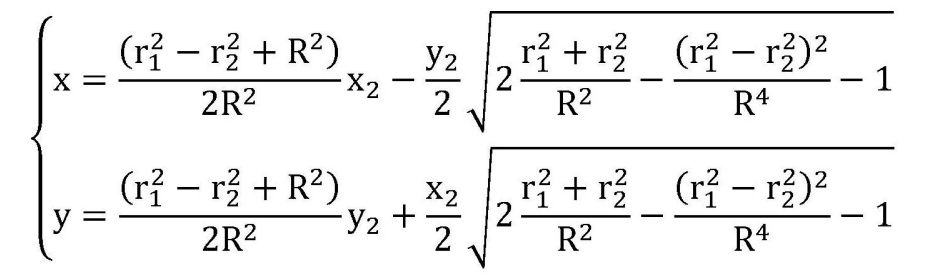
其中,(x1,y1)为第一超声波雷达探头的第一坐标,可以将第一坐标作为原点。(x2,y2)为第二超声波雷达探头的第二坐标,(x,y)为障碍物的原始坐标,r1为第一超声波雷达探头检测到的DE距离,r2为第二超声波雷达探头检测到的DE, 且仅保留了y>0的障碍物坐标。
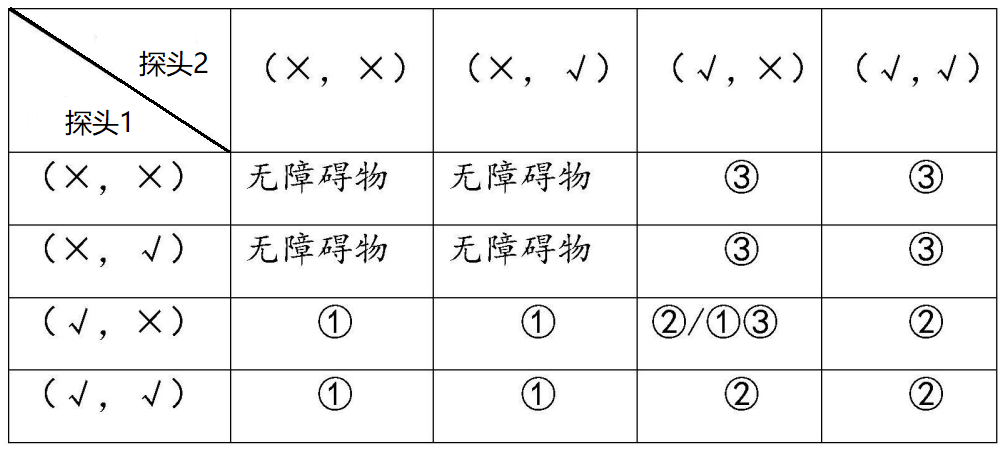
特别说明,公式只有在|r1-r2|<R时才成立,当不满足此条件时,则认为此时有两个障碍物分别处于①、③区域。
对于区域①、③内的障碍物坐标没有用公式计算,而是根据扇形包络模型,确定障碍物的位置坐标。 随着探头数目增多,非重叠区域减少,可用检测距离会变得更多, 定位效果更好。
两探头的四个检测距离中如果只有一个探头的第一检测距离不为0,则认为该障碍物存在于非重叠区域,位置可以用扇形的弧线来表示。只有两个探头的第一检测 距离都不为0,该障碍物才存在于重叠区域内,此时可以利用上述障碍物坐标公式计算障碍物的原始坐标。
针对实际使用中的误检、漏检情况进行分析,用×、√符号表示是否接收到距离 值,比如(×,√)表示探头的DE距离d1=0,CE距离d2≠0。参见表1,表1为探头探测出的障碍物区域表。