ROS是一个分布式框架,为用户提供多节点(进程)之间的通信服务,所有软件功能和工 具都建立在这种分布式通信机制上,所以ROS的通信机制是最底层也是最核心的技术。在大多数应用场景下,尽管我们不需要关注底层通信的实现机制,但是了解其相关原理一定会帮助我
们在开发过程中更好地使用ROS。以下就ROS最核心的三种通信机制进行介绍。
话题通信机制
话题在ROS中使用最为频繁,其通信模型也较为复杂。
在ROS中有两个节点:
一个是发布者Talker,
另一个是订阅者Listener。
两个节点分别发布、订阅同一个话题,启动顺序没有强制要求,此处假设Talker首先启动,可分成图中所示的七步来分析建立通信的详细过程。
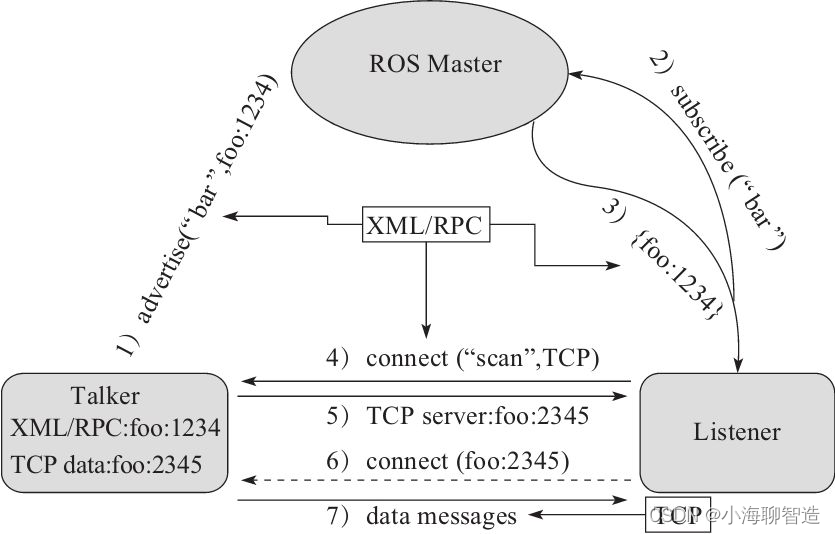
1.Talker注册
Talker启动,通过1234端口使用RPC向ROS Master注册发布者的信息,包含所发布消息的话题名;ROS Master会将节点的注册信息加入注册列表中。
2.Listener注册
Listener启动,同样通过RPC向ROS Master注册订阅者的信息,包含需要订阅的话题名。
3.ROS Master进行信息匹配
Master根据Listener的订阅信息从注册列表中进行查找,如果没有找到匹配的发布者,则等待发布者的加入;如果找到匹配的发布者信息,则通过RPC向Listener发送Talker的RPC地址信息。
4.Listener发送连接请求
Listener接收到Master发回的Talker地址信息,尝试通过RPC向Talker发送连接请求,传输订阅的话题名、消息类型以及通信协议(TCP/UDP)。
5.Talker确认连接请求
Talker接收到Listener发送的连接请求后,继续通过RPC向Listener确认连接信息,其中包含自身的TCP地址信息。
6.Listener尝试与Talker建立网络连接
Listener接收到确认信息后,使用TCP尝试与Talker建立网络连接。
7.Talker向Listener发布数据
成功建立连接后,Talker开始向Listener发送话题消息数据。
从上面的分析中可以发现,前五个步骤使用的通信协议都是RPC,最后发布数据的过程才使用到TCP。
ROS Master在节点建立连接的过程中起到了重要作用,但是并不参与节点之间最终的数据传输。节点建立连接后,可以关掉ROS Master,节点之间的数据传输并不会受到影响,但是其他节点也无法加入这两个节点之间的网络。
二 服务通信机制
服务是一种带有应答的通信机制,通信原理如图2-11所示,与话题的通信相比,其减少了Listener与Talker之间的RPC通信。
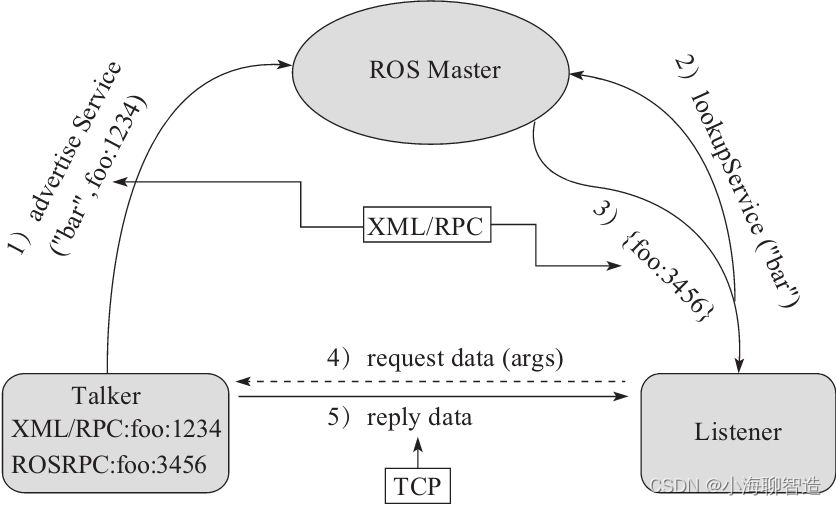
1.Talker注册
Talker启动,通过1234端口使用RPC向ROS Master注册发布者的信息,包含所提供的服务名;ROS Master会将节点的注册信息加入注册列表中。
2.Listener注册
Listener启动,同样通过RPC向ROS Master注册订阅者的信息,包含需要查找的服务名。
3.ROS Master进行信息匹配
Master根据Listener的订阅信息从注册列表中进行查找,如果没有找到匹配的服务提供者,则等待该服务的提供者加入;如果找到匹配的服务提供者信息,则通过RPC向Listener发送Talker的TCP地址信息。
4.Listener与Talker建立网络连接
Listener接收到确认信息后,使用TCP尝试与Talker建立网络连接,并且发送服务的请求数据。
5.Talker向Listener发布服务应答数据
Talker接收到服务请求和参数后,开始执行服务功能,执行完成后,向Listener发送应答数据。
参数管理机制
参数类似于ROS中的全局变量,由ROS Master进行管理,其通信机制较为简单,不涉及TCP/UDP的通信
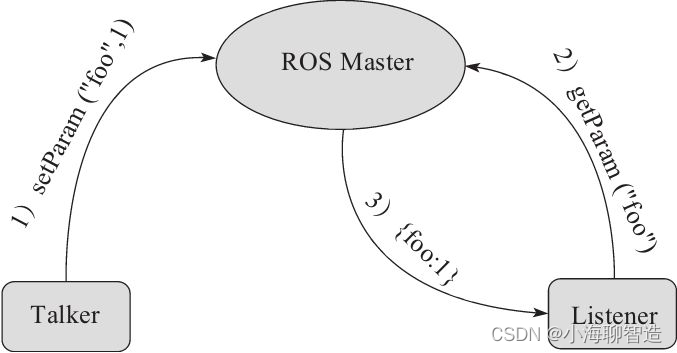
1.Talker设置变量
Talker使用RPC向ROS Master发送参数设置数据,包含参数名和参数值;ROS Master会将参数名和参数值保存到参数列表中。
2.Listener查询参数值
Listener通过RPC向ROS Master发送参数查找请求,包含所要查找的参数名。
3.ROS Master向Listener发送参数值
Master根据Listener的查找请求从参数列表中进行查找,查找到参数后,使用RPC将参数值发送给Listener。
这里需要注意的是,如果Talker向Master更新参数值,Listener在不重新查询参数值的情况下是无法知晓参数值已经被更新的。所以在很多应用场景中,需要一种动态参数更新的机制