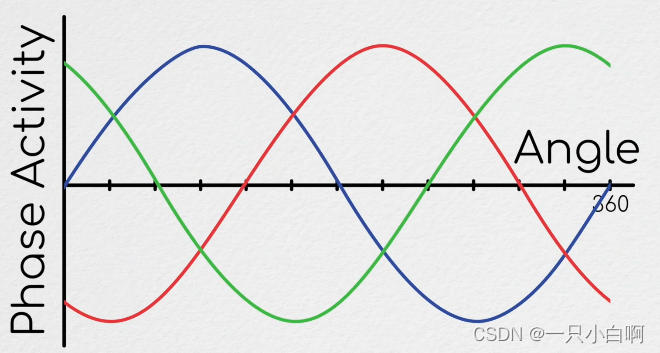
与一维数字转子位置不同,电流和电压都是二维的。可以在矩形笛卡尔平面中考虑这些尺寸。
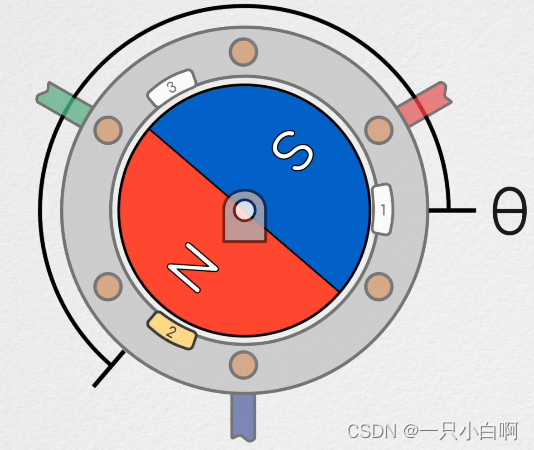
用旋转角度和幅度来描述向量

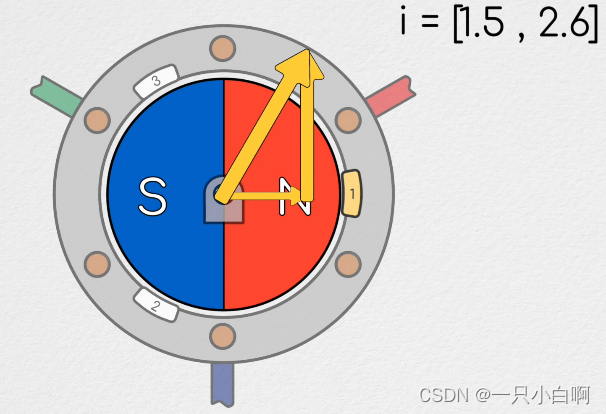
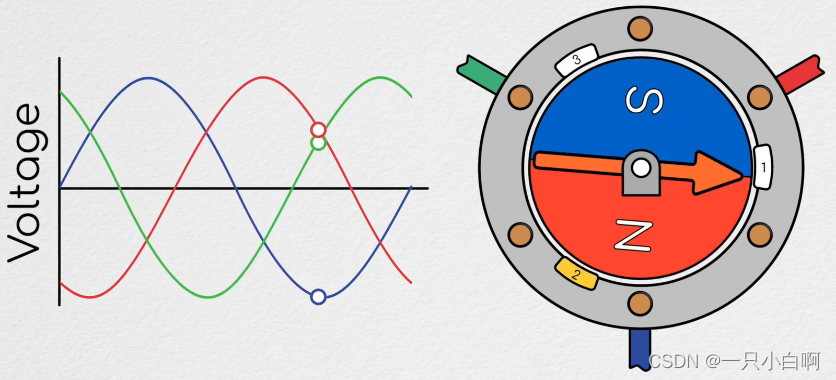
虽然电流命令的幅度和施加的电压是进入控制器的误差项的函数,它们施加的角度是 d-q 轴方向的函数,因此也是转子位置的函数。将这两个变量视为单独控制。矢量的大小将由反馈控制环路确定。同时,应用角度将是转子角度的函数,并将通过所选的 H 桥换向和脉宽调制方法来处理。
讨论闭环控制器的设计,当我们进一步了解电机的系统分析时,闭环控制器将在后面的章节中决定这些信号的幅度。我们将更多地讨论换向以及调制电压的不同方式。这里已经讨论了我们可以调制电压的更简单的方法之一。事实上,这是第六节中六步换向的主要焦点。

通过使用来自霍尔效应传感器的信号作为低分辨率角度测量,我们规定了电压矢量的应用角度,从而规定了电流流动的角度,作为转子角度的超离散函数。因此,如果您使用反馈控制器的 6 块换向,您的电流控制器将查看流经电机的电流,然后将其与您提供的参考值进行比较,并生成电压信号的幅度应用。
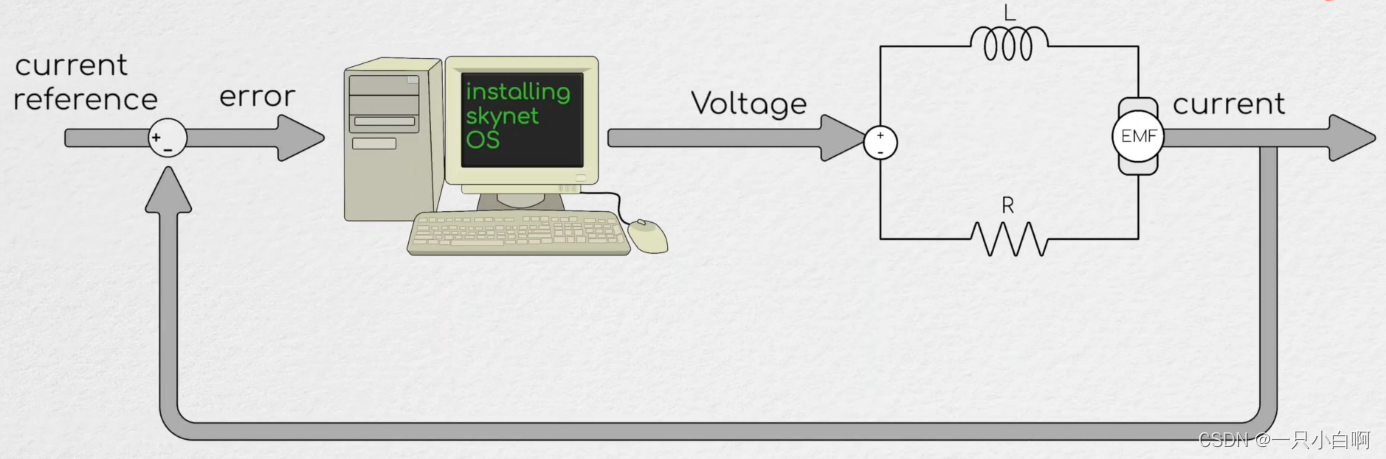
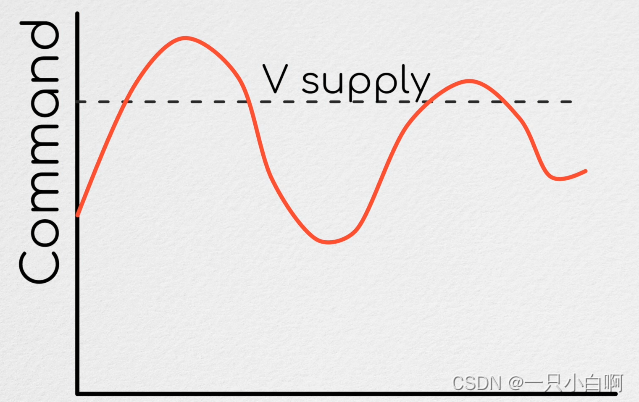
然后将该电压信号除以系统的电源电压,

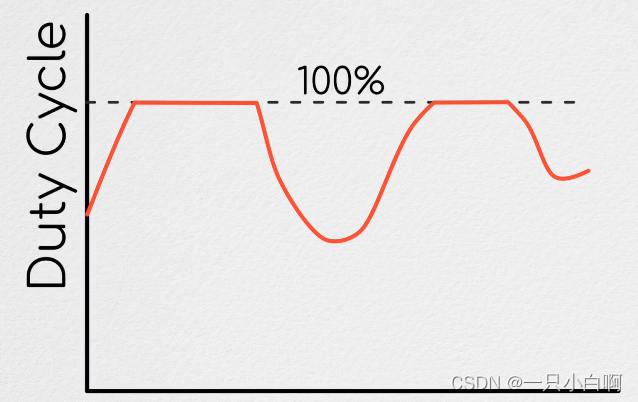
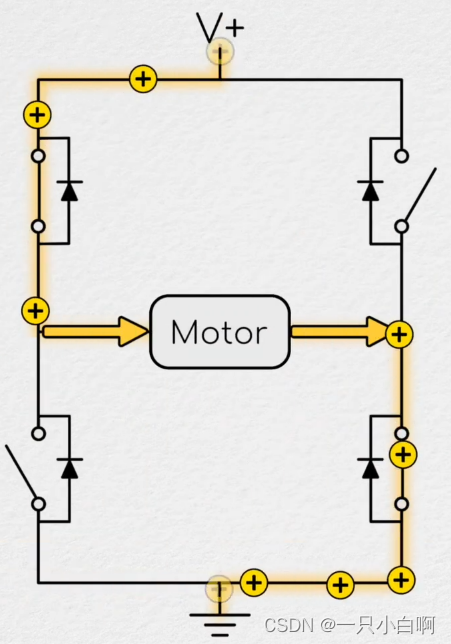
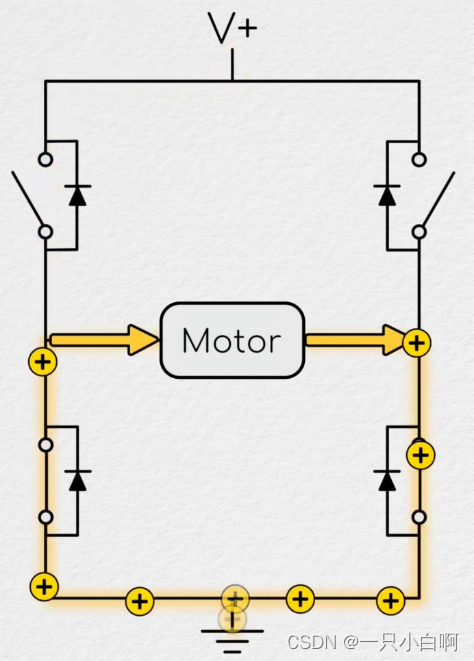
以找到您想要应用于 H 桥 MOSFET 的占空比。如果命令电压高于电源电压,您只需将占空比饱和到 100%。
最后,这些占空比将根据您的换向方案提供给适当的MOS。其中,正 100% 占空比对应于高侧 MOSFET 在 100% 的时间内处于活动状态,负 100% 占空比对应于低侧 MOSFET 在 100% 的时间内处于活动状态。请注意,此换向模式适用于正扭矩。
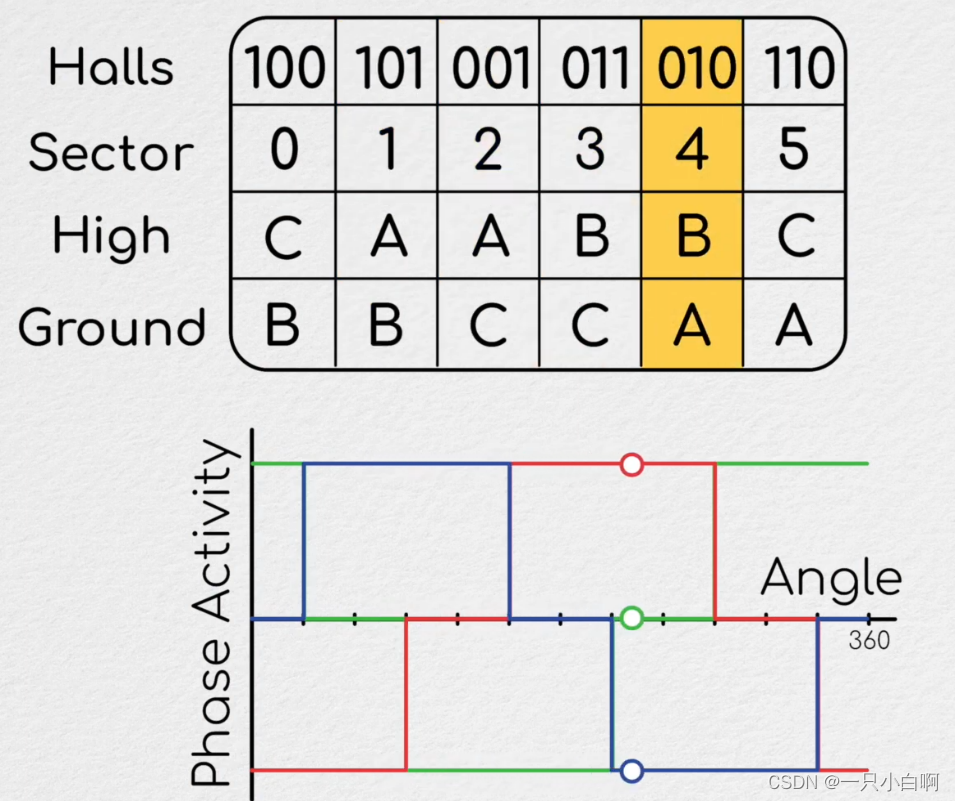
如果我们想产生负扭矩,我们只需绕 x 轴翻转此换向方案即可。

由于我们在过去几集中讨论过的所有原因、扭矩纹波、不需要的 dx 是电流等,六图换向还有很多不足之处。
但是,如果您有更精确的角度感应方法(例如编码器),则可以改进换向方法。我们知道,电机的电阻器和导管电路充当电压和电流之间相对快速的低通滤波器。
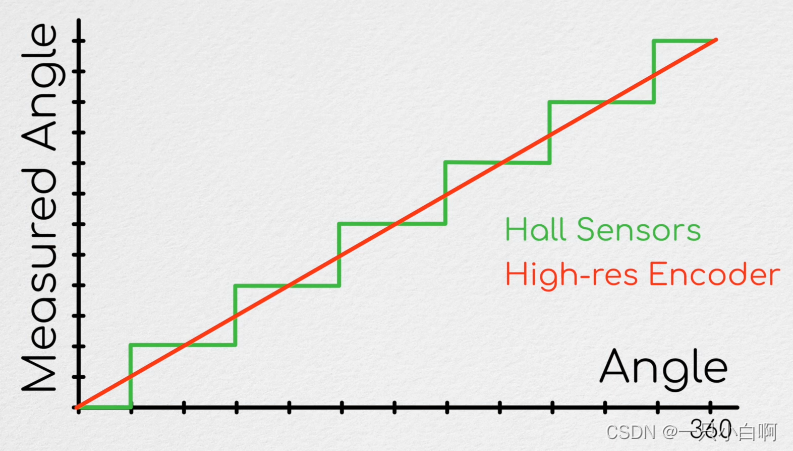
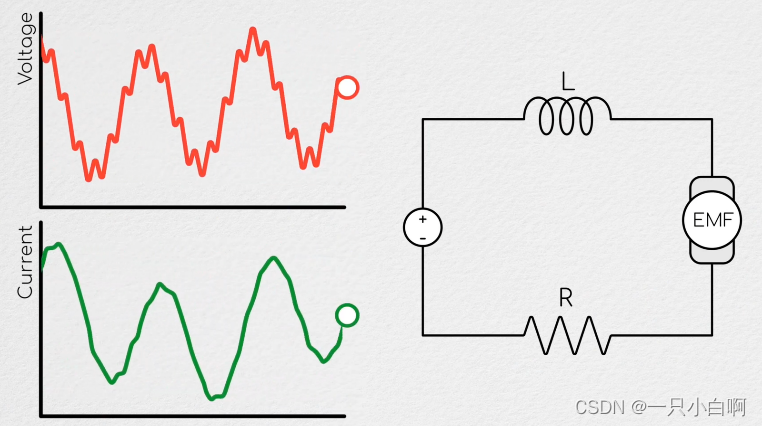
因此,在低到中旋转速率下,您可以通过输入电压矢量(其旋转速率与电机角度相同)来产生正弦电流矢量,该电流矢量随电机角度旋转。但在现实世界中你如何真正做到这一点呢?
电流控制环路的输出将指定要应用的电压幅度。同样,您可以将其除以电源电压并在 100% 处饱和。您可以将此占空比乘以 A、B 和 C 正弦曲线(它们是 theta 的函数),而不是将此占空比完全应用于块换向所规定的任何拟合。
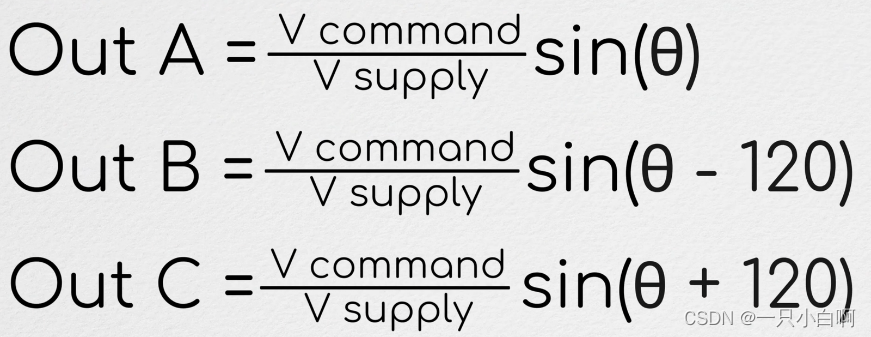
这会产生负 100% 和正 100% 之间的三个占空比,然后您可以将其相应地输出到 H 桥。

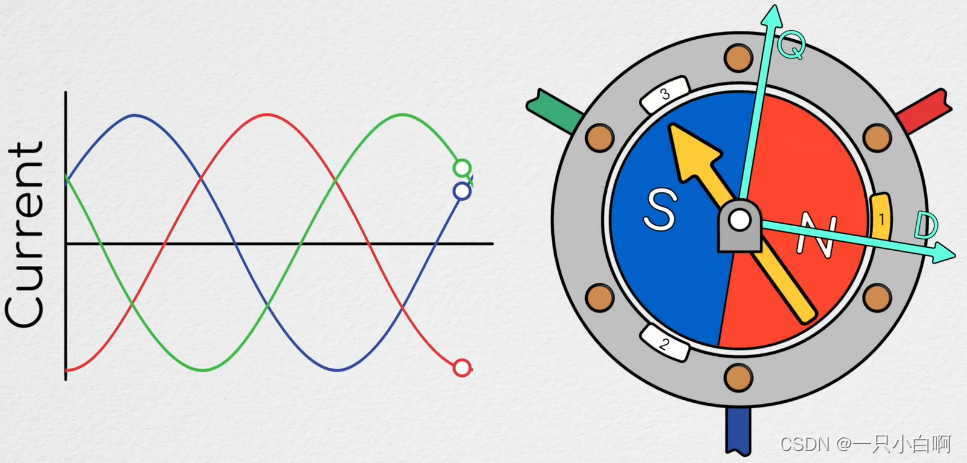
然而,虽然这种换向方案将允许您更好地控制流向 Q 轴的电流,并且通过将正弦波向前或向后相移一定角度偏移,但如果您想要,例如,感觉,您可以在 D 方向上调制电流被削弱了。
正弦换向有一个细微的缺点。在正弦换向期间,您是否充分利用了电压范围?但我这么说是什么意思呢?当我们实际上应用“电压”时,这意味着应用电压差。因此施加到 A 相的电压的绝对大小并不重要。重要的是施加在 A 上的电压与施加在 B 和 C 上的电压的大小不同。
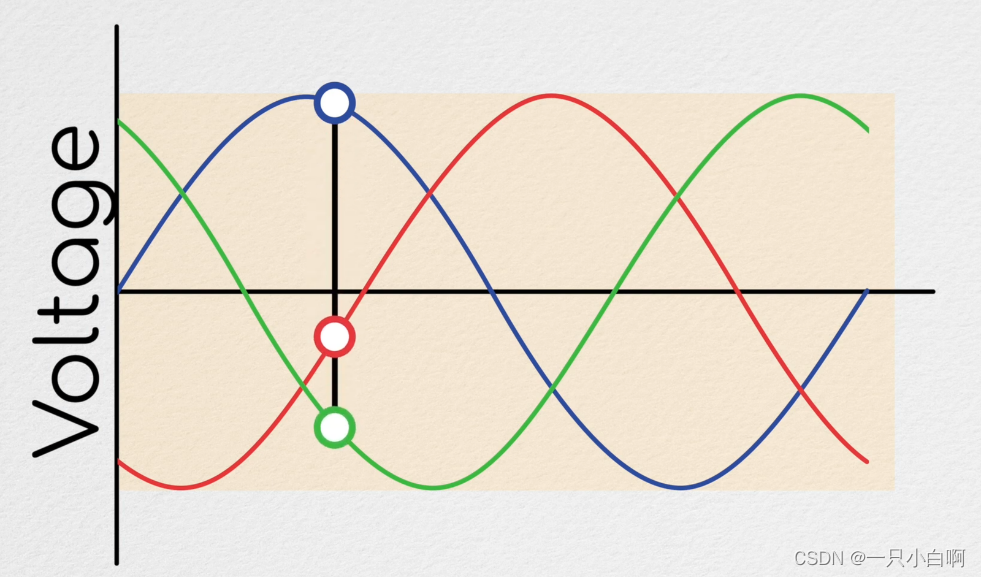
有点像如果你从 100 英尺高的平台跳到另一个 99 英尺高的平台上,重力只会使你加速这一英尺。
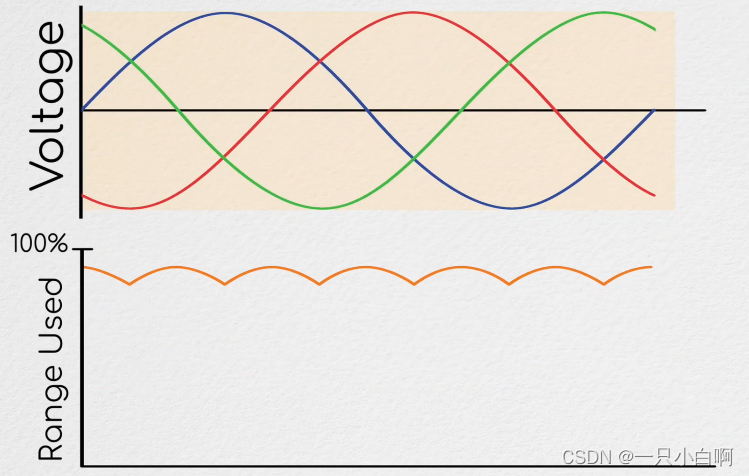
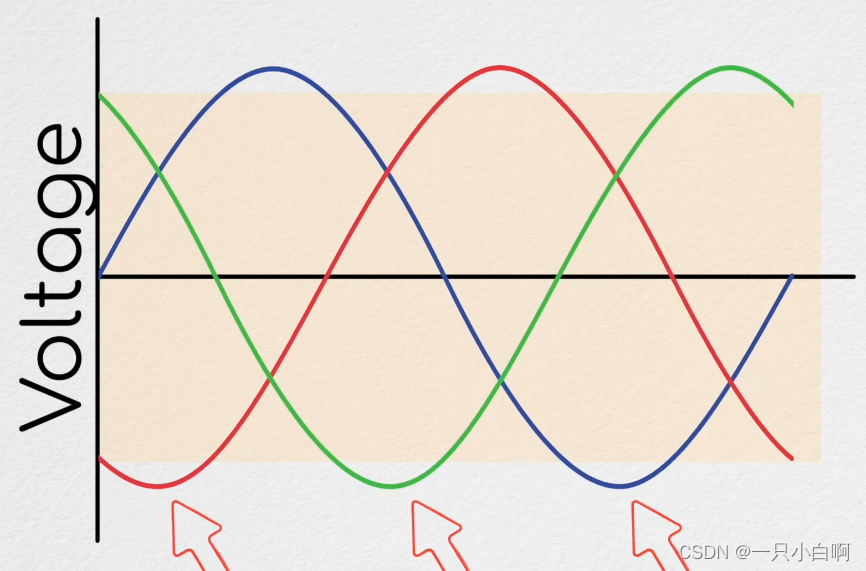
但是,如果我们绘制施加到 A、B 和 C 相的电压的正弦函数,我们会注意到我们的相不可能跨越整个电源电压范围。
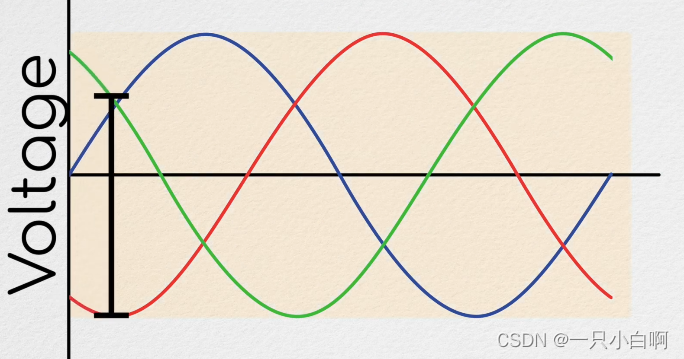
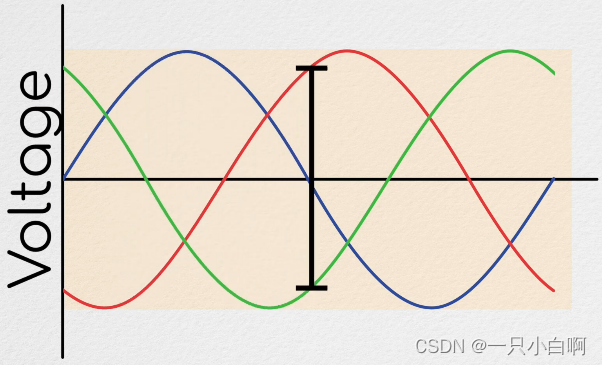
事实上,如果我们绘制电压差,即该图上每个角度的最高电压减去最低电压,我们会发现我们使用的最大电压差仅为系统所能完成的 86.6%。
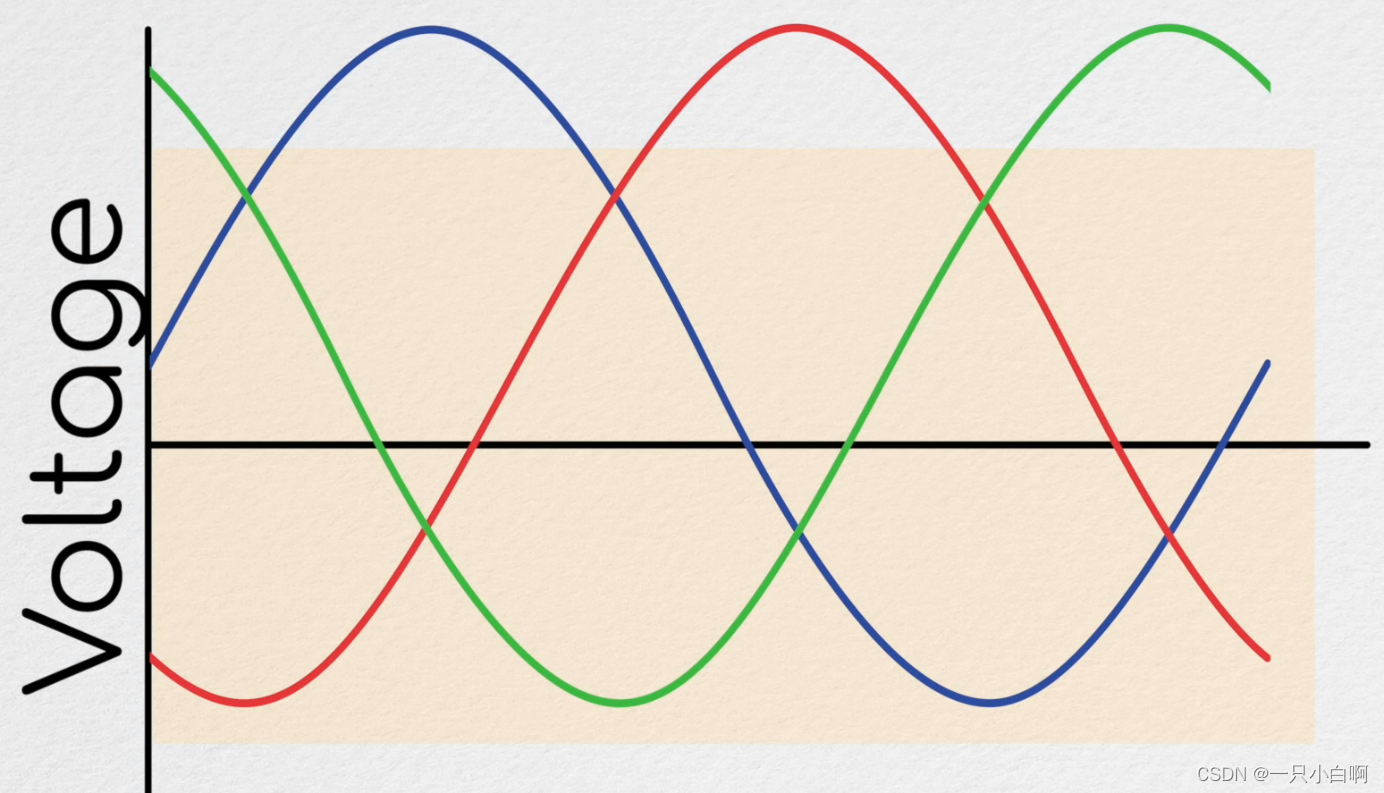
这给我们带来了调制电压的行业标准方法,即空间矢量调制。就像正弦调制一样,空间矢量调制保持电压差,该电压差随电机角度旋转以与 Q 轴保持一致。然而,通过一些巧妙的数学计算,它可以充分利用您的电源电压。

我个人发现,展示其工作原理的最简单方法就是演示从正弦换向波形获取电压曲线并将其转换为空间矢量调制电压信号的转换。

因为我们知道我们的电压差理论上可以增加 1/0.866 或 15.47%。

虽然我们现在将应用电源电压可以提供的最大电压差,但我们还需要命令 115% 的占空比,这在定义上是不可能的。但这就是我们发挥创意的地方。

我想再次提醒您,重要的不是电压的绝对值。就是电压差。

因此,如果我们查看其中一个需要在 115% 的时间内将电压控制为高电压的地方,那么电路的另一侧应用了什么?在这里,我们仅命令其他两相以 58% 的占空比接地。

因此,考虑到电路动力学会将 PWM 电压过滤为伪连续电压信号这一事实,如果不具有不可能的 115% 占空比,则该位置的电压差驱动电流的能力将完全相同和 58% 的占空比,我们将所有三个阶段都降低了 28.8%。其中一个在 86.6% 的时间内连接到高电平,另外两个在 86.6% 的时间内连接到低电平。

以同样的方式,我们看到低侧需要以 115% 占空比接地的点,
我们可以将三个的公共电压提高 28.8%,我们可以将三个的公共电压提高 28.8%,使三个占空比再次达到 86.6%。
因此,为了将负 115% 部分向上,将正 115% 部分向下,我们将在所有三个正弦曲线的这些位置上设置一个具有峰值的三角波。

现在,使用这种调制方案,我们可以充分利用可用的电压范围,同时将所需的占空比保持在 100% 或以下。

这就是空间矢量调制,通常被认为是执行电机换向的最佳方法之一。然而,就像我们在第 7 集中讨论的块换向一样,对于任何给定的换向方案,可以通过许多不同的方式执行实际的 PWM 开关





![[代码随想录]基本数据结构篇](https://img-blog.csdnimg.cn/bee1a54168e74454841aabdbdc1882b1.png)
![[Realtek sdk-3.4.14b]RTL8197FH-VG 2.4G to WAN吞吐量低于60%的问题分析及解决方案](https://img-blog.csdnimg.cn/cc1d006ddffc491691addd066a3e6ea0.png)