裂缝类型
裂缝类型有很多种,这里我们仅仅判断线性裂缝与网状裂缝,线性裂缝按照其走势有可分为横向裂缝、纵向裂缝和斜向裂缝。
我觉得大家应当有这样的意识,面对网状裂缝,它的二维参数是否有意义?答案是没有!如果检测到网状裂缝,我想大家的第一反应是比较严重了,需要修补了。如果是一条线性裂缝呢?我是不是还有考虑一下它的受损程度是否达到需要修补的地步。
所以按照我的想法,可以求网状裂缝的面积,评估其受损程度,求线性裂缝的面积、长度和宽度,评估其受损程度。
直方图投影法
网状裂缝的直方图投影
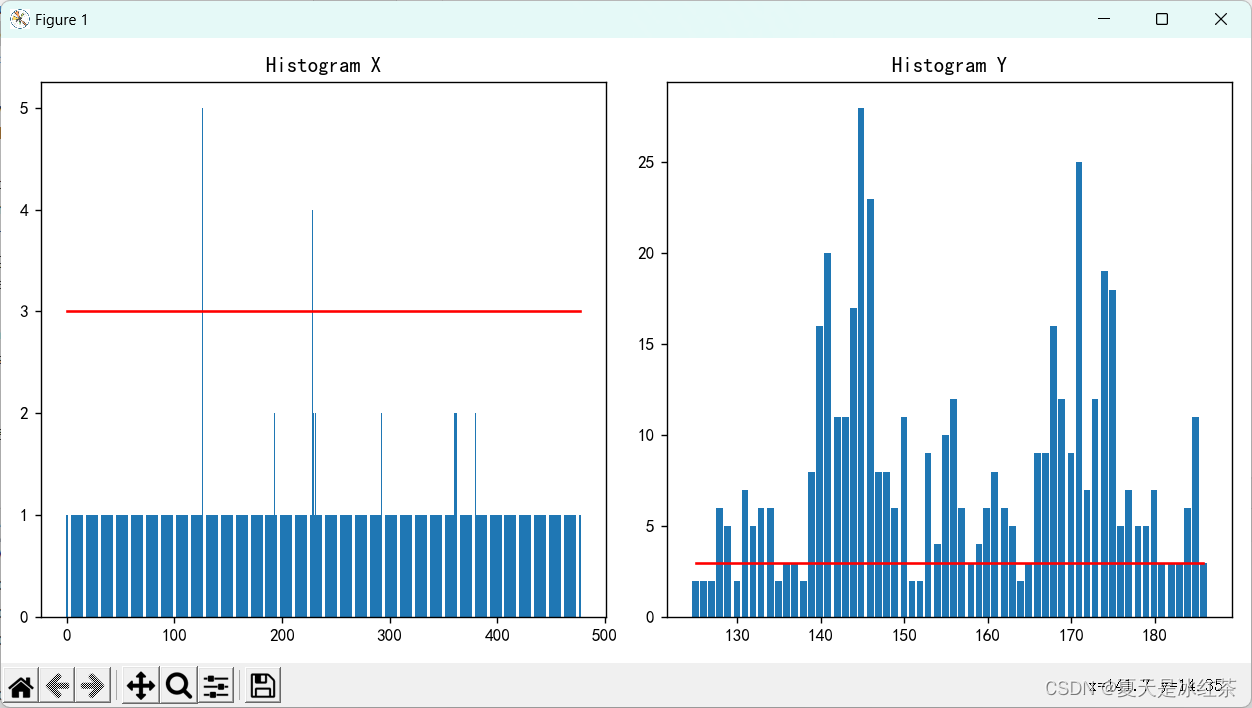
横向裂缝的直方图投影
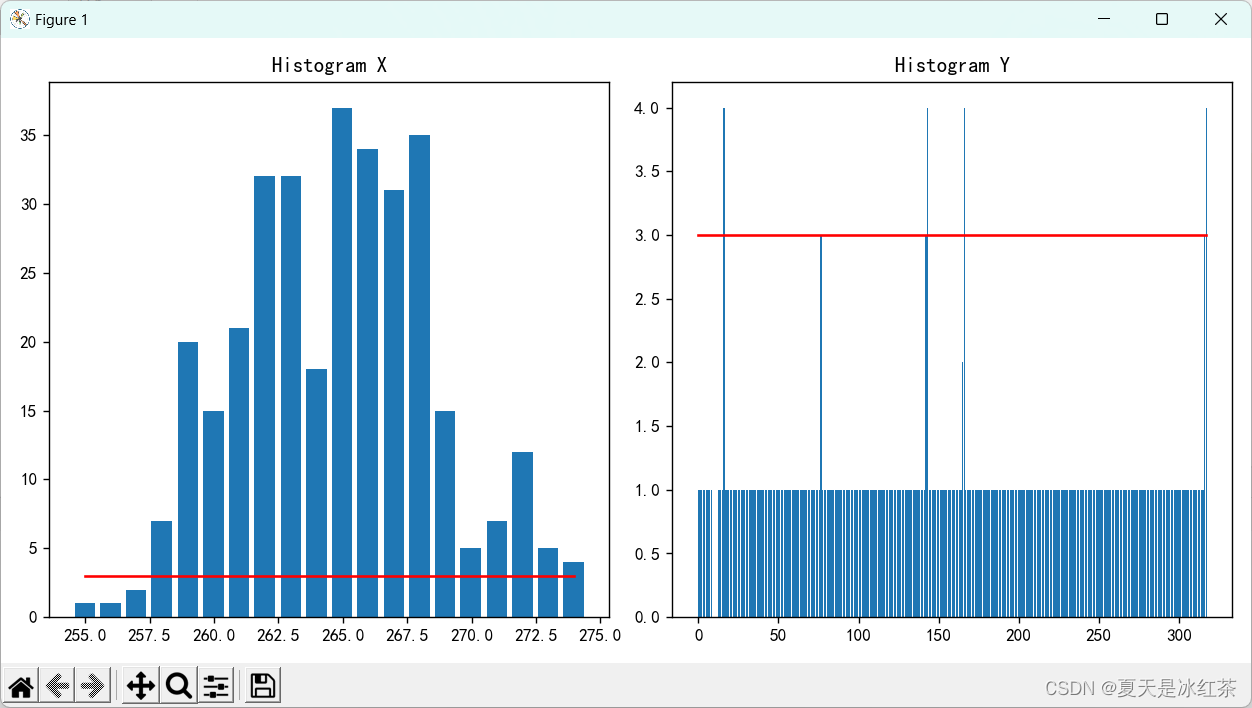
纵向裂缝的直方图投影
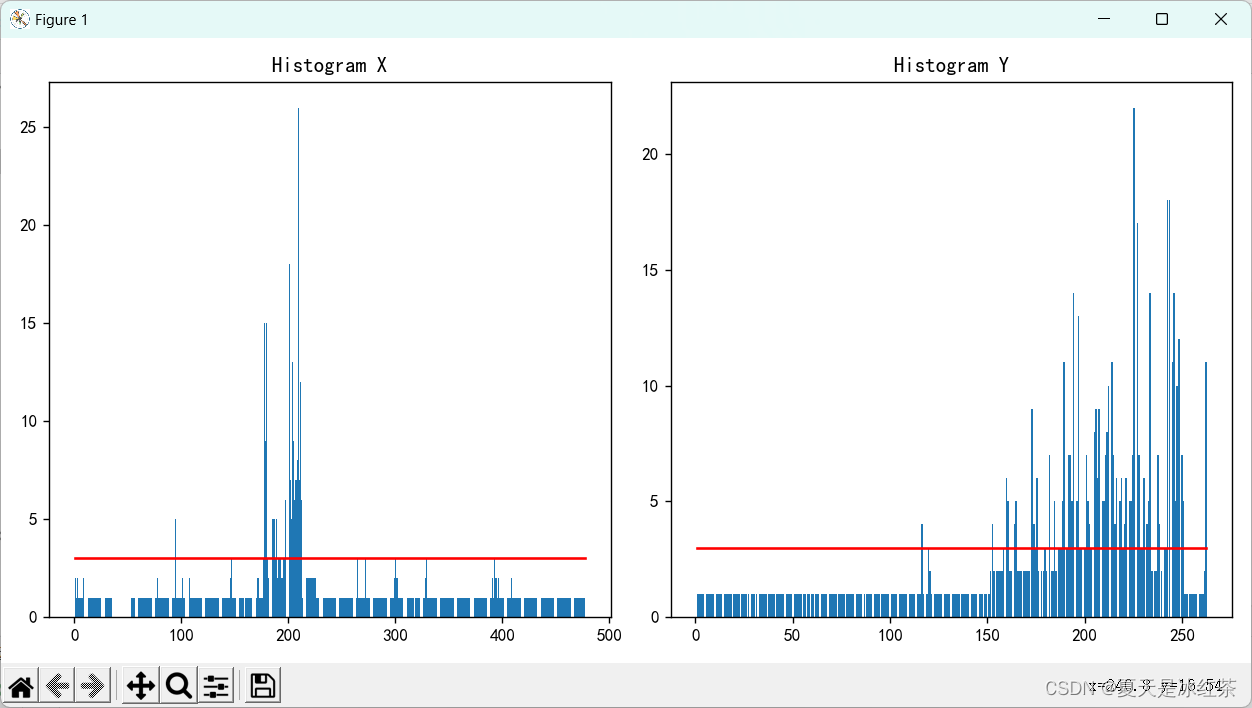
斜向裂缝的直方图投影
上面四张图是四种裂缝对应的直方图,结合上面的一些特点,我们可以依照自己的数据集进行类型分类。
获取最小外接矩形信息
接下来,get_minAreaRect_information函数会从二值化掩膜图像中提取最小外接矩形的相关信息,包括中心点坐标、宽高和旋转角度。inference_minAreaRect函数用于计算最小外接矩形框的宽、高和角度信息,并将角度转换为相对于图像水平方向的夹角。
def inference_minAreaRect(minAreaRect):
w, h = minAreaRect[1]
if w > h:
angle = int(minAreaRect[2])
else:
angle = -(90 - int(minAreaRect[2]))
return w, h, angle
def _get_minAreaRect_information(mask):
mask = pz.BinaryImg(mask)
contours, hierarchy = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
contour_merge = np.vstack(contours)
minAreaRect = cv2.minAreaRect(contour_merge)
return minAreaRectpz.BinaryImg获取图像二值图,请确保读取时候为BGR的图片。
初始化分类裂缝的参数
创建了一个ClassificationCrack类,并且对裂缝的分类参数进行初始化,有分类裂缝的阈值threshold,分类裂缝的高宽比阈值HWration,用于分类裂缝的直方图比例阈值Histration。
class CrackType():
"""直方图投影法推断裂缝类型"""
def __init__(self, threshold=3, HWratio=10, Histratio=0.5):
"""
初始化分类裂缝的参数
:param threshold: 阈值,用于分类裂缝的阈值
:param HWratio: 高宽比,用于分类裂缝的高宽比阈值
:param Histratio: 直方图比例,用于分类裂缝的直方图比例阈值
"""
self.threshold = threshold
self.HWratio = HWratio
self.Histratio = Histratio
self.types = {0: 'Horizontal',
1: 'Vertical',
2: 'Oblique',
3: 'Mesh'}这里我们使用字典self.types,这样就可以通过键值对判断裂缝的类型了。
骨骼点投影直方图
在ClassificationCrack类下,我们再定义了一个hist_judge的方法,less_than_T统计直方图中大于 0 且小于等于阈值 self.threshold 的像素数量,more_than_T统计直方图中大于阈值 self.threshold 的像素数量。通过more_than_T / (less_than_T + 1e-5)来比较是否超过了直方图比例阈值。
def hist_judge(self, hist_v):
less_than_T = np.count_nonzero((hist_v > 0) & (hist_v <= self.threshold))
more_than_T = np.count_nonzero(hist_v > self.threshold)
return more_than_T / (less_than_T + 1e-5) > self.Histratio裂缝分类
classify 方法是 ClassificationCrack 类中的另一个成员方法,它接收三个值,minAreaRect 是一个元组,表示最小外接矩形框的信息,包括中心点坐标、宽高和旋转角度;skeleton_pts是一个数组,表示骨骼点的坐标;HW是当前 patch 的高和宽。
def classify(self, minAreaRect, skeleton_pts, HW):
H, W = HW
w, h, angle = inference_minAreaRect(minAreaRect)
if w / h < self.HWratio or h / w < self.HWratio:
pts_y, pts_x = skeleton_pts[:, 0], skeleton_pts[:, 1]
hist_x = np.histogram(pts_x, W)
hist_y = np.histogram(pts_y, H)
if self.hist_judge(hist_x[0]) and self.hist_judge(hist_y[0]):
return 3
return self.angle2cls(angle)
@staticmethod
def angle2cls(angle):
angle = abs(angle)
assert 0 <= angle <= 90, "ERROR: The angle value exceeds the limit and should be between 0 and 90 degrees!"
if angle < 35:
return 0
elif 35 <= angle <= 55:
return 2
elif angle > 55:
return 1
else:
return None利用 inference_minAreaRect 函数从 minAreaRect 中获取旋转矩形框的宽度 w、高度 h 和角度 angle。接下来,通过判断 w / h 和 h / w 是否小于 self.HWratio 来判断旋转矩形框的长宽比是否满足分类条件。
如果长宽比满足条件,则将 skeleton_pts 按照 x 和 y 方向投影到直方图 hist_x 和 hist_y,然后通过 self.hist_judge 方法判断这两个直方图是否满足分类条件。
以上条件均满足,则会认为是网状裂缝,否则就使用angle2cls来进行角度分类。
根据角度的大小将裂缝分为以下三类:
- 如果角度小于 35 度,则返回 0,表示水平裂缝。
- 如果角度在 35 到 55 度之间,则返回 2,表示倾斜裂缝。
- 如果角度大于 55 度,则返回 1,表示垂直裂缝。
- 如果角度不在上述范围内,则返回 None 。
测试文件main
"""
裂缝分类如何判断
横向、纵向、网状、斜裂缝
"""
import os
import matplotlib.pyplot as plt
import numpy as np
import cv2
import pyzjr as pz
from skimage.morphology import skeletonize
from skimage.filters import threshold_otsu
from skimage.color import rgb2gray
class CrackType():
"""直方图投影法推断裂缝类型"""
def __init__(self, threshold=3, HWratio=10, Histratio=0.5):
"""
初始化分类裂缝的参数
:param threshold: 阈值,用于分类裂缝的阈值
:param HWratio: 高宽比,用于分类裂缝的高宽比阈值
:param Histratio: 直方图比例,用于分类裂缝的直方图比例阈值
"""
self.threshold = threshold
self.HWratio = HWratio
self.Histratio = Histratio
self.types = {0: 'Horizontal',
1: 'Vertical',
2: 'Oblique',
3: 'Mesh'}
def inference_minAreaRect(self, minAreaRect):
"""
旋转矩形框长边与x轴的夹角.
旋转角度 angle 是相对于图像水平方向的夹角,范围是 -90 到 +90 度.
然而,一般情况下,我们习惯将角度定义为相对于 x 轴正方向的夹角,范围是 -180 到 +180 度.
"""
w, h = minAreaRect[1]
if w > h:
angle = int(minAreaRect[2])
else:
angle = -(90 - int(minAreaRect[2]))
return w, h, angle
def classify(self, minAreaRect, skeleton_pts, HW):
"""
针对当前crack instance,对其进行分类;
主要利用了骨骼点双向投影直方图、旋转矩形框宽高比/角度;
:param minAreaRect: 最小外接矩形框,[(cx, cy), (w, h), angle];
:param skeleton_pts: 骨骼点坐标;
:param HW: 当前patch的高、宽;
"""
H, W = HW
w, h, angle = self.inference_minAreaRect(minAreaRect)
if w / h < self.HWratio or h / w < self.HWratio:
pts_y, pts_x = skeleton_pts[:, 0], skeleton_pts[:, 1]
hist_x = np.histogram(pts_x, W)
hist_y = np.histogram(pts_y, H)
if self.hist_judge(hist_x[0]) and self.hist_judge(hist_y[0]):
return 3
return self.angle2cls(angle)
def hist_judge(self, hist_v):
less_than_T = np.count_nonzero((hist_v > 0) & (hist_v <= self.threshold))
more_than_T = np.count_nonzero(hist_v > self.threshold)
return more_than_T / (less_than_T + 1e-5) > self.Histratio
@staticmethod
def angle2cls(angle):
angle = abs(angle)
assert 0 <= angle <= 90, "ERROR: The angle value exceeds the limit and should be between 0 and 90 degrees!"
if angle < 35:
return 0
elif 35 <= angle <= 55:
return 2
elif angle > 55:
return 1
else:
return None
def _get_minAreaRect_information(mask):
"""
从二值化掩膜图像中获取最小外接矩形的相关信息
:param mask:二值化掩膜图像,包含目标区域的白色区域
:return:最小外接矩形的信息,包括中心点坐标、宽高和旋转角度
"""
mask = pz.BinaryImg(mask)
contours, hierarchy = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
contour_merge = np.vstack(contours)
minAreaRect = cv2.minAreaRect(contour_merge)
return minAreaRect
def SkeletonMap(target):
"""
获取骨架图的信息
:param target: 目标图
:return: 骨架图与一个数组,其中每一行表示一个非零元素的索引(y,x),包括行索引和列索引
"""
gray = rgb2gray(target)
thresh = threshold_otsu(gray)
binary = gray > thresh
skimage = skeletonize(binary)
skepoints = np.argwhere(skimage)
skimage = skimage.astype(np.uint8)
return skimage, skepoints
if __name__ == '__main__':
plt.switch_backend('TkAgg')
masks_dir = r"D:\PythonProject\RoadCrack\dimension2_data\num" # 这里改为存放上面图片的路径
results_save_dir = "A_results"
os.makedirs(results_save_dir, exist_ok=True)
classifier = CrackType()
imgfile,_ = pz.getPhotopath(masks_dir, debug=False)
for path in imgfile:
mask = cv2.imread(path)
H, W = mask.shape[:2]
mask_copy = mask.copy()
skeimage, skepoints = SkeletonMap(mask_copy)
minAreaRect=_get_minAreaRect_information(mask)
pts_y, pts_x = skepoints[:, 0], skepoints[:, 1]
hist_x = np.histogram(pts_x, W)
hist_y = np.histogram(pts_y, H)
result = classifier.classify(minAreaRect, skepoints, HW=(H, W))
crack_type = classifier.types[result]
print(crack_type)
T = classifier.threshold
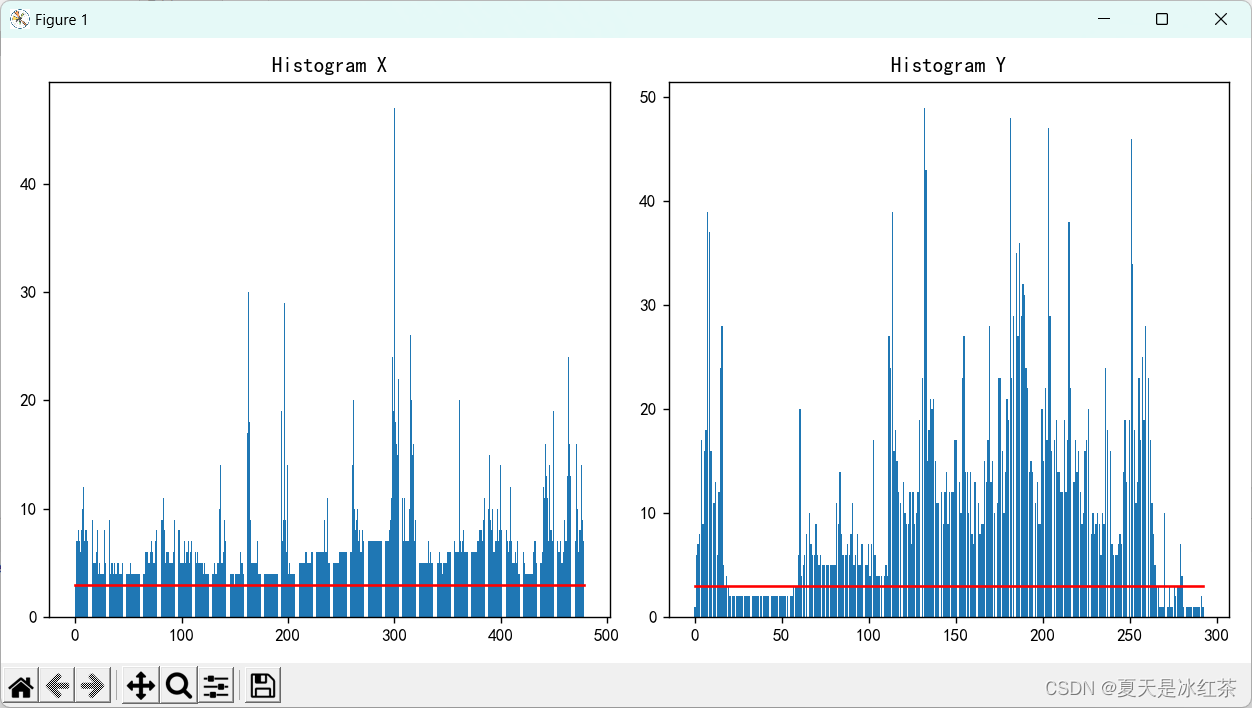
plt.figure(figsize=(10, 5))
plt.subplot(121)
plt.plot(hist_x[1][:-1], [T] * len(hist_x[0]), 'r')
plt.bar(hist_x[1][:-1], hist_x[0])
plt.title("Histogram X")
plt.subplot(122)
plt.plot(hist_y[1][:-1], [T] * len(hist_y[0]), 'r')
plt.bar(hist_y[1][:-1], hist_y[0])
plt.title("Histogram Y")
plt.tight_layout() # 自动调整子图布局,防止重叠
plt.show()
与我们实际图片进行对比,其检测效果均还不错,threshold,HWratio,Histratio这三个初始值均为经验所得,还是要依照自己的数据来设定。这里的SkeletionMap函数将会获得骨架图中的索引点,它并没有进行去消除毛刺的,实际并不影响,因为我们采用的这个方法,些许毛刺影响不了判断。
现在我们只需要写一个推动裂缝类型的函数,可以用于直接去判断我们设定的裂缝类型:
def infertype(mask):
"""推导裂缝类型"""
crack = CrackType()
H, W = mask.shape[:2]
mask_copy = mask.copy()
skeimage, skepoints = SkeletonMap(mask_copy)
minAreaRect = _get_minAreaRect_information(mask)
result = crack.classify(minAreaRect, skepoints, HW=(H, W))
crack_type = crack.types[result]
return result, crack_type