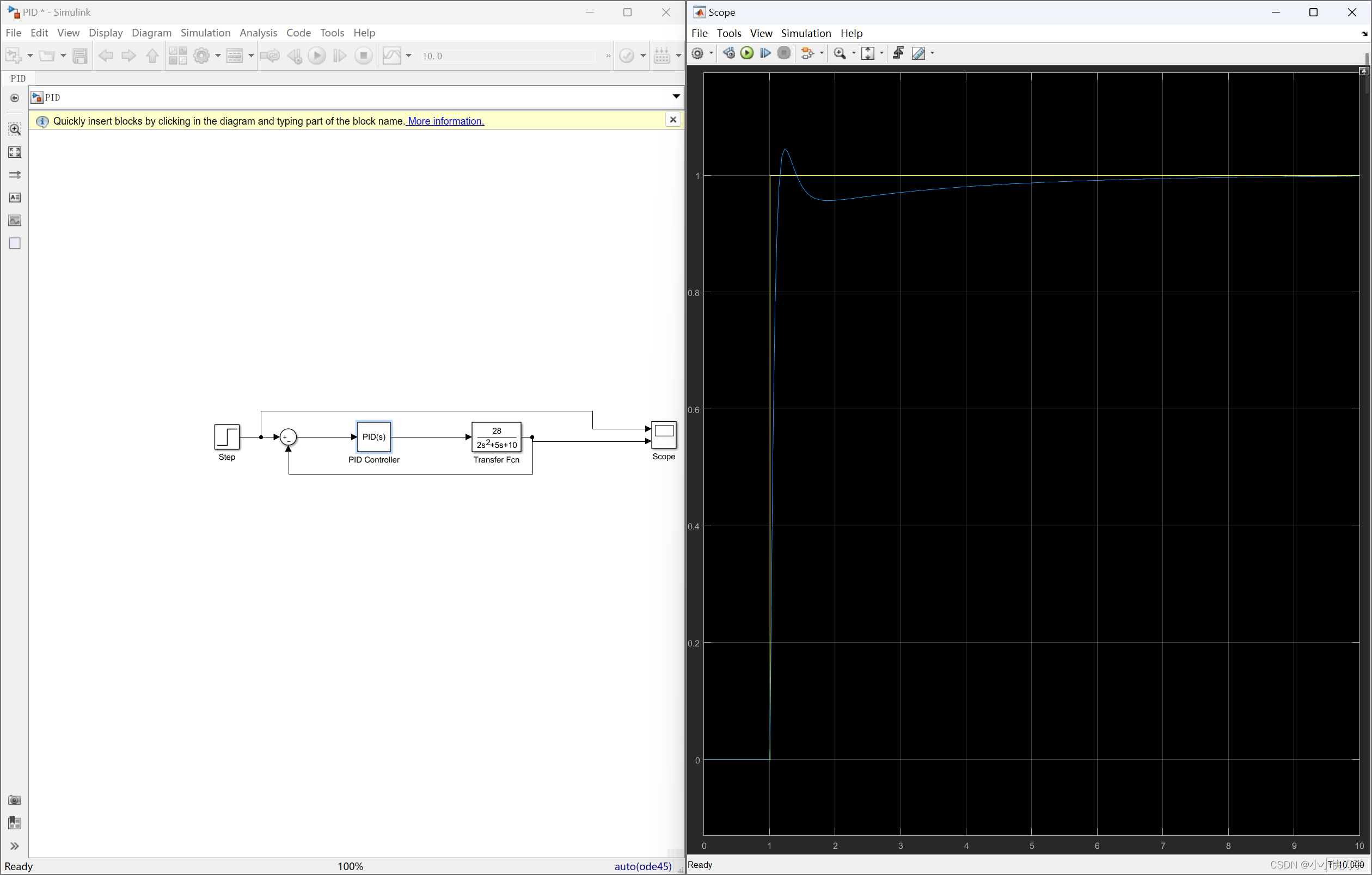
昨天,在中南大学面试的老师,老师突然问到如何调PID,关于PID,我只知道一些基本概念,实际中并没有做过相关PID的项目,就连仿真也没搞过,所以今天就照着网上的教程做了PID的仿真,调PID的顺序就是P-I-D,一般调到PI即可。
P=1,I=0,D=0。有比较大的稳态误差,且超调量大。
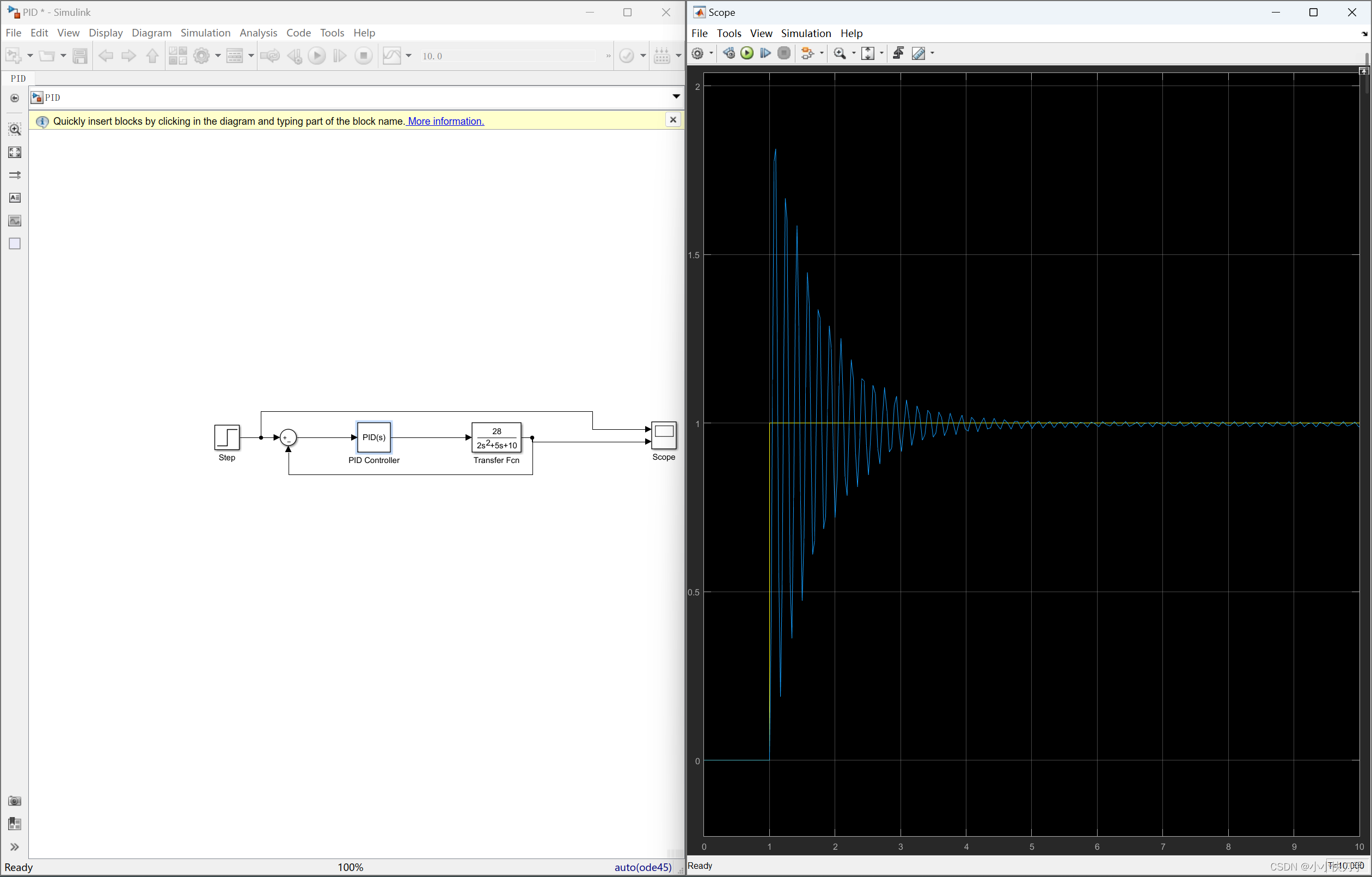
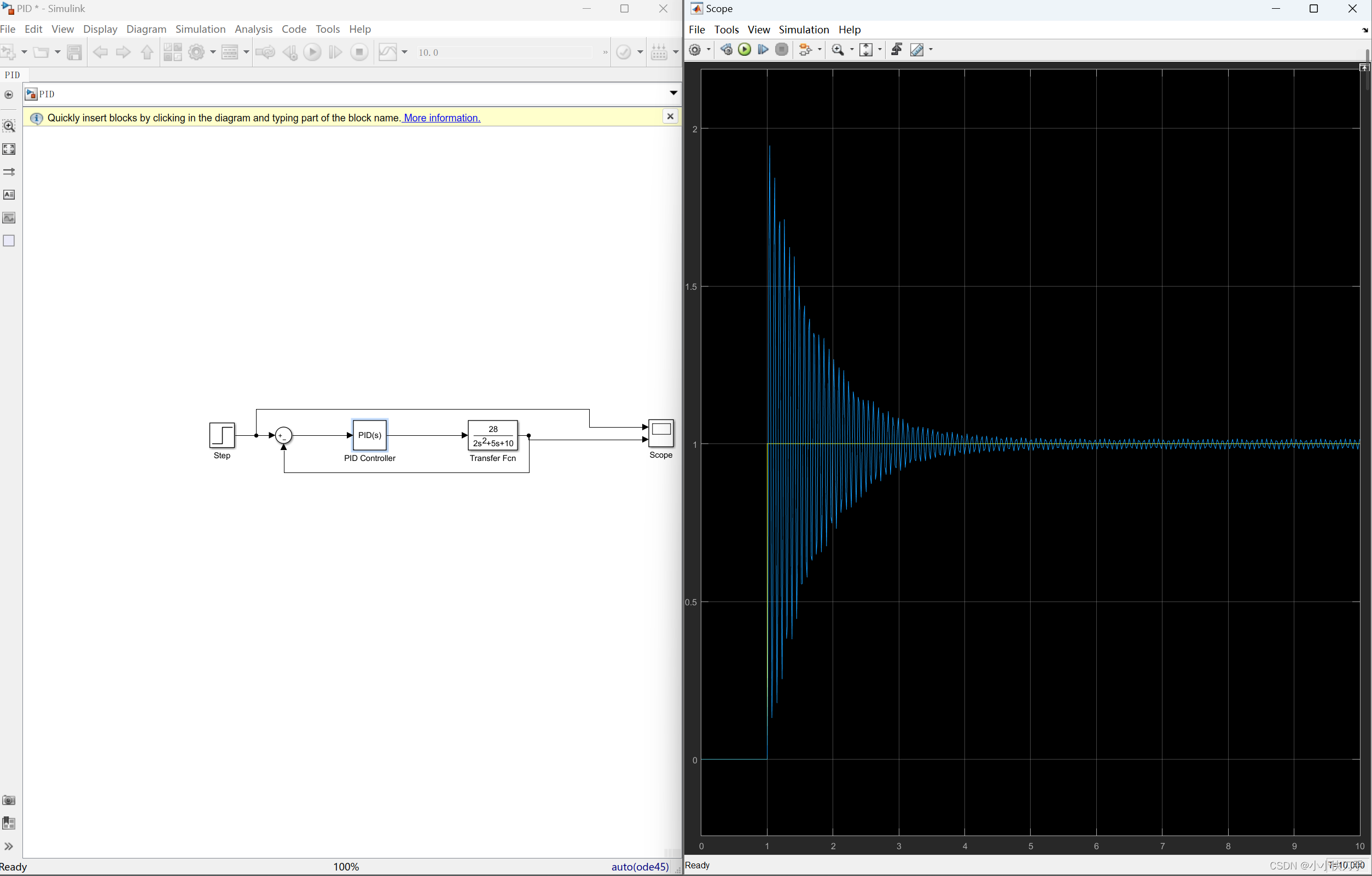
P=10,I=0,D=0。稳态误差减小,但没有消除,且振荡十分明显。
P=100,I=0,D=0。稳态误差减小,且振荡十分离谱。
P=500,I=0,D=0。P太大的话会导致系统不稳定。
P=1,I=1,D=0。稳态误差基本是消除了,其实到这里系统就可以了,所以说PI基本能够解决问题。
接下来看看微分的作用。
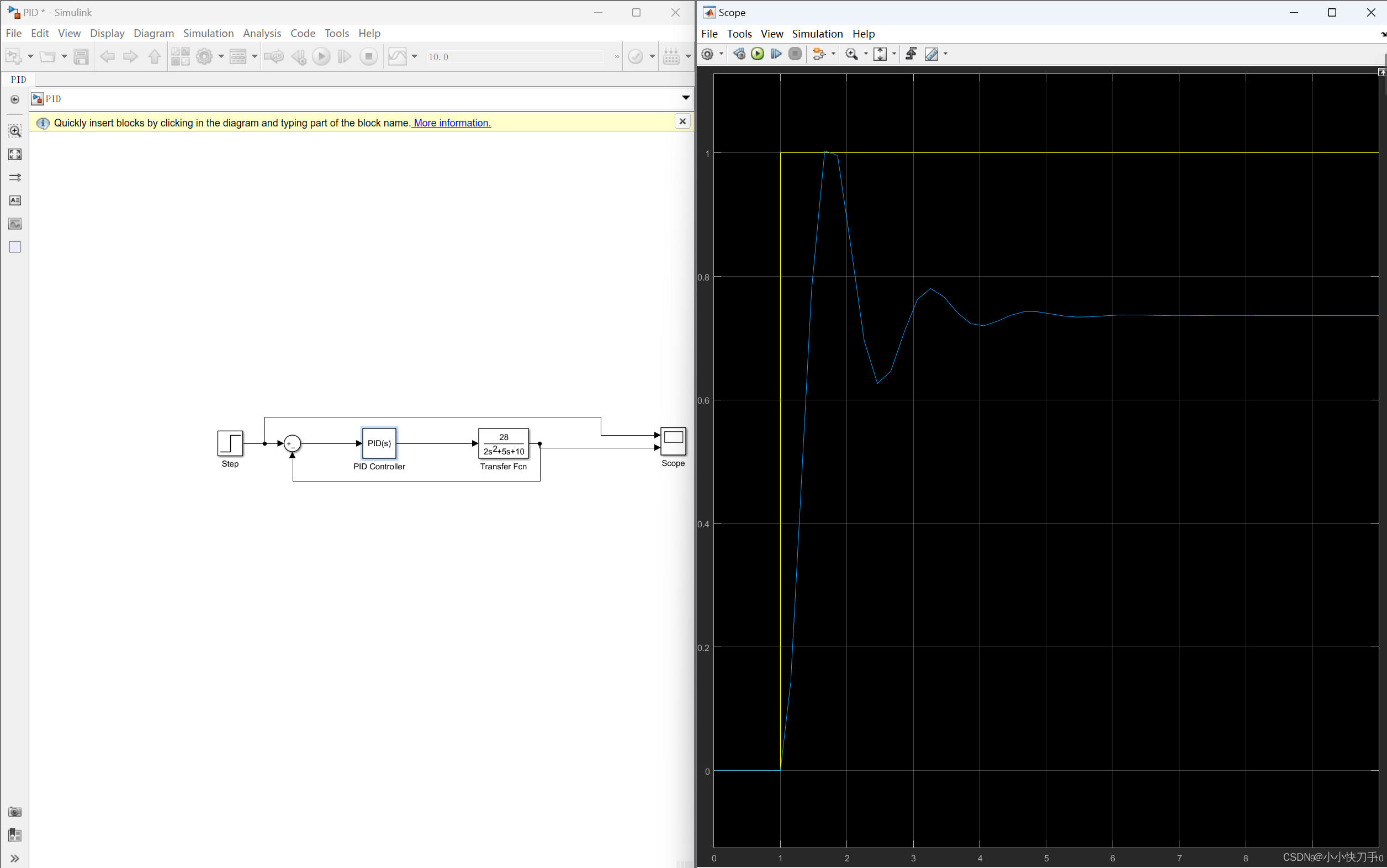
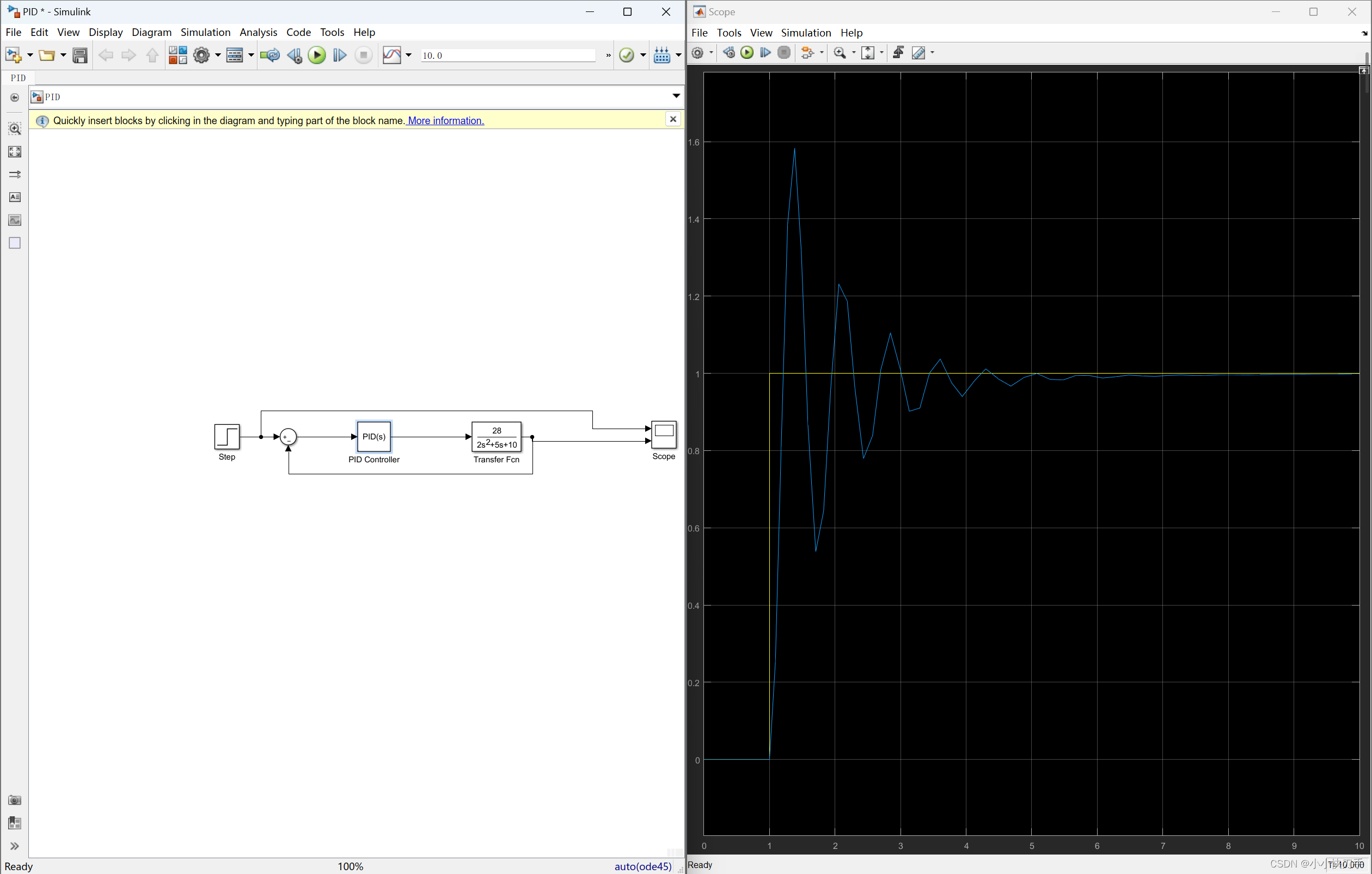
P=5,I=2,D=0。有明显的振荡。
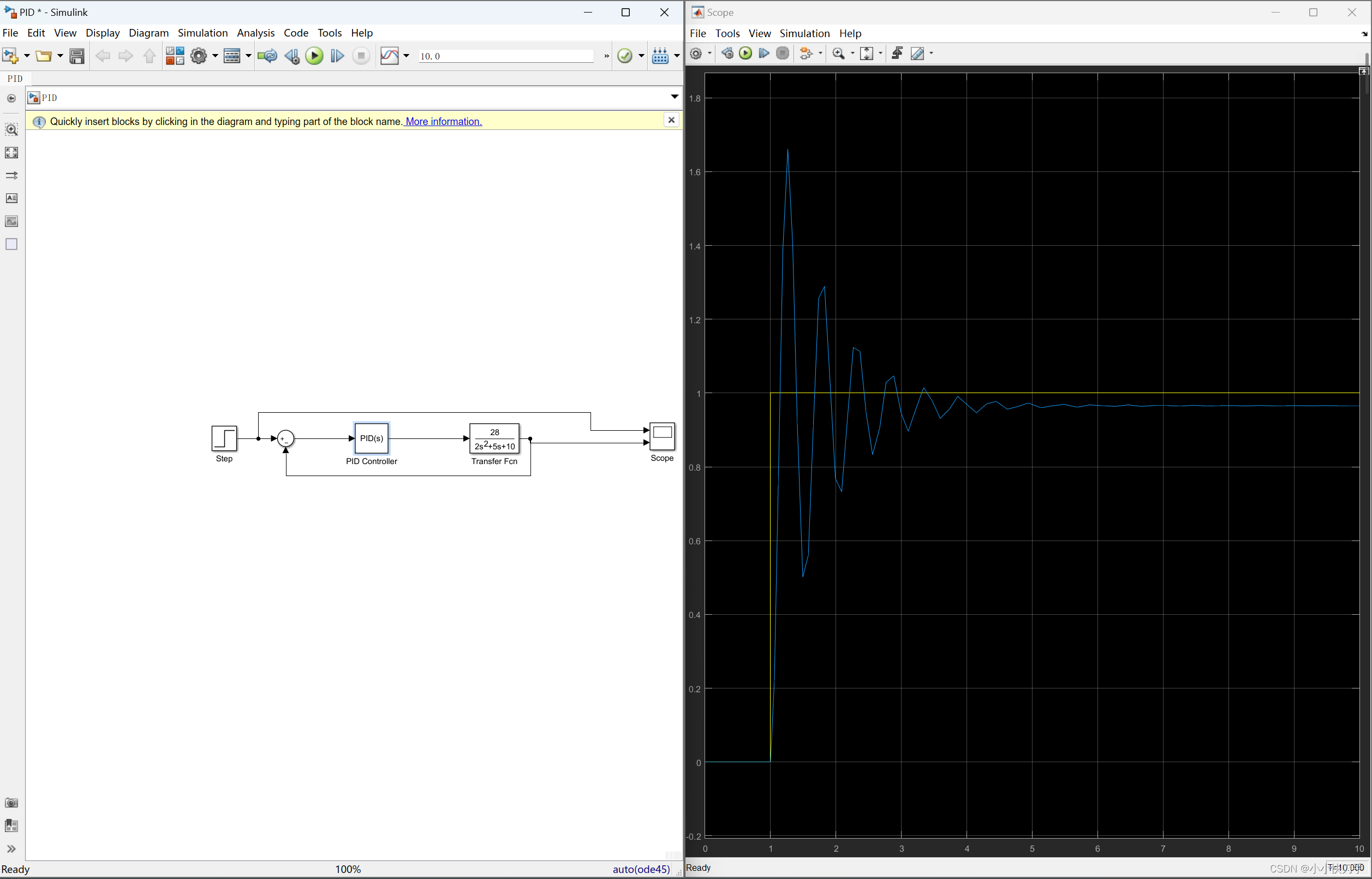
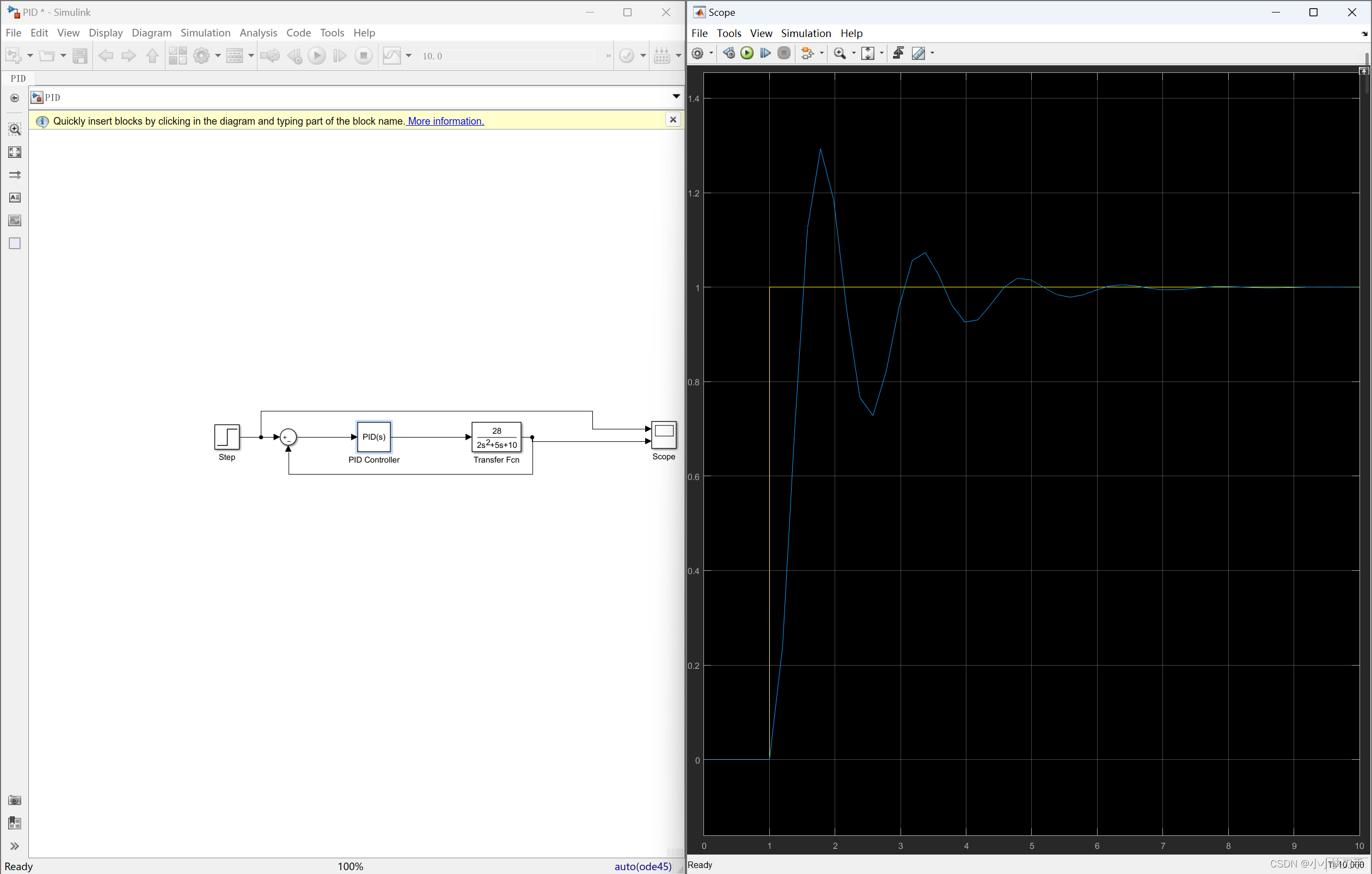
P=5,I=2,D=1。发现超调减少了,动态性能也好了很多。
附录:
直观的读懂什么是PID(附带matlab仿真解读) - 知乎 (zhihu.com)(讲得很好)
PID超详细教程——PID原理+串级PID+C代码+在线仿真调参-CSDN博客
pid调节_一颗大椰子的博客-CSDN博客
PID Web Sim (gitee.io)
PID通用调试方法(建议学习) - 哔哩哔哩 (bilibili.com)



![[论文笔记]Prefix Tuning](https://img-blog.csdnimg.cn/img_convert/0d307fd4adbc77ebb663456f611696e1.png)