最近学了一段时间gym_unity,把一些资料留在这里
实例
- 实例gym_unity训练RollerBall:https://blog.csdn.net/alibutter/article/details/120908687
- 实例gyn_unity训练3DBall:https://zhuanlan.zhihu.com/p/554927641?utm_id=0
源码:https://github.com/Delta-King/UnityPPO
实现时下载release-19稳定版本:https://github.com/Unity-Technologies/ml-agents/releases/tag/release_19
官方资料
- ml-agents官网:https://github.com/Unity-Technologies/ml-agents/tree/develop
- ml-agents中文文档:https://github.com/Hustacds/ml-agents/tree/master/docs/localized/zh-CN
- mlagents_env对外gym接口文档:https://github.com/Unity-Technologies/ml-agents/blob/develop/docs/Python-Gym-API.md
- mlagents_env多智能体接口文档:https://github.com/Unity-Technologies/ml-agents/blob/develop/docs/Python-PettingZoo-API.md
- mlagents_env python接口文档:https://github.com/Unity-Technologies/ml-agents/blob/develop/docs/Python-LLAPI.md
- gym_unity的官方解释:https://github.com/Unity-Technologies/ml-agents/blob/develop/docs/Python-Gym-API-Documentation.md
- 多智能体接口:https://github.com/Unity-Technologies/ml-agents/blob/develop/docs/Python-PettingZoo-API.md
- ML-agents训练时的configutation文件说明(yaml文件):https://github.com/Unity-Technologies/ml-agents/blob/develop/docs/Training-Configuration-File.md
过程报错:
报错:\ml-agents-develop\com.unity.ml-agents\Runtime\Sensors\RayPerceptionSensor.cs(459,39): error CS0103: The name ‘QueryParameters’ does not exist in the current context
原因:ML-agents的版本过高,对Unity的版本有要求。换release-19即可
参考:https://github.com/Unity-Technologies/ml-agents/issues/5958
报错:TypeError: Descriptors cannot not be created directly.
If this call came from a _pb2.py file, your generated code is out of date and must be regenerated with protoc >= 3.19.0.
If you cannot immediately regenerate your protos, some other possible workarounds are:
- Downgrade the protobuf package to 3.20.x or lower.
- Set PROTOCOL_BUFFERS_PYTHON_IMPLEMENTATION=python (but this will use pure
Python parsing and will be much slower).
解决办法(把protobuf的版本从4.多降下来):pip install protobuf==3.20.*
报错:TypeError: can’t convert cuda:0 device type tensor to numpy. Use Tensor.cpu() to copy the tensor to
解决方案:参考:https://blog.csdn.net/weixin_45887062/article/details/126417024
报错:ImportError: cannot import name ‘cygrpc’ from ‘grpc._cython’ (D:\A\envs\pythonProject\lib\site-packa
解决:pip install grpcio==1.27.2
参考:https://github.com/GoogleCloudPlatform/python-docs-samples/issues/1540
gym_unity模板:
from mlagents_envs.environment import UnityEnvironment
from gym_unity.envs import UnityToGymWrapper
env_directory = 'D:\\Desktop\\3DBall\\UnityEnvironment.exe'
unity_env = UnityEnvironment(env_directory, base_port=5005, no_graphics=False)
env = UnityToGymWrapper(unity_env, uint8_visual=True)
执行env.step(action)和env.reset()就可以
UnityGymWrapper:
UnityGymWrapper是Unity和gym的封装接口,封装Unity环境给当作gym使用。UnityGymWrapper只适用于单智能体,UnityGymWrapper5可以用于多智能体
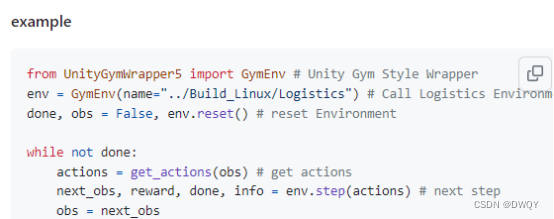
Multi-agent使用UnityGymWrapper5例子:
源码:https://github.com/leehe228/LogisticsEnv
论文:Multi agent reinforcement learning based UAV control for Urban Aerial Mobility logistics
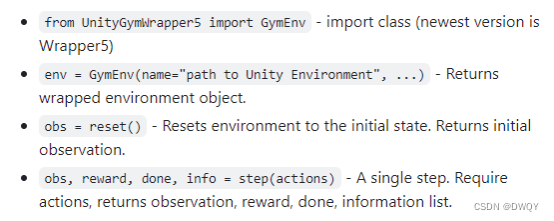
UnityGymWrapper使用模板:
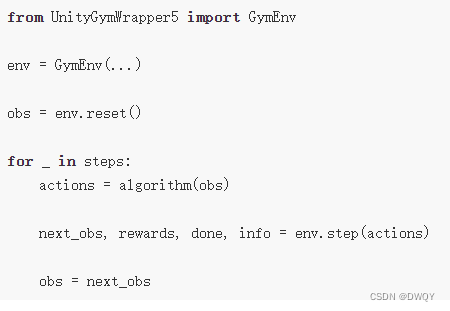
参考:https://lab.uwa4d.com/lab/624a2749a8103dabd0e58f10
疑问:
自定义的unity环境env的step和reset()在哪写???
gym_unity训练完的模型怎么保存????
.pt 文件通常是指 PyTorch 的模型文件,它是 PyTorch 框架中用于保存和加载模型权重和结构的一种格式。
参考:https://blog.csdn.net/weixin_44943389/article/details/131940271在这里插入图片描述



![linux、windows的pip一键永久换源[清华源、中科大、豆瓣、阿里云]](https://img-blog.csdnimg.cn/dc521cdc2bb245dcb71e670bff0b206f.png)