1、AABB碰撞检测算法
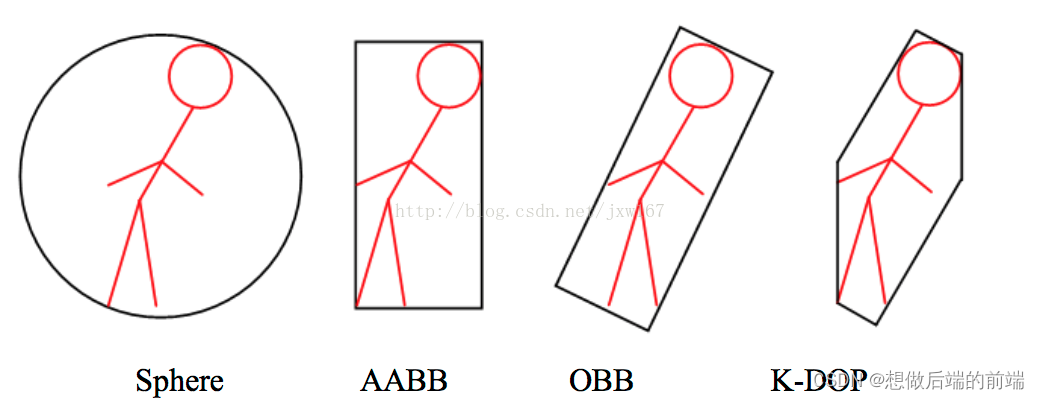
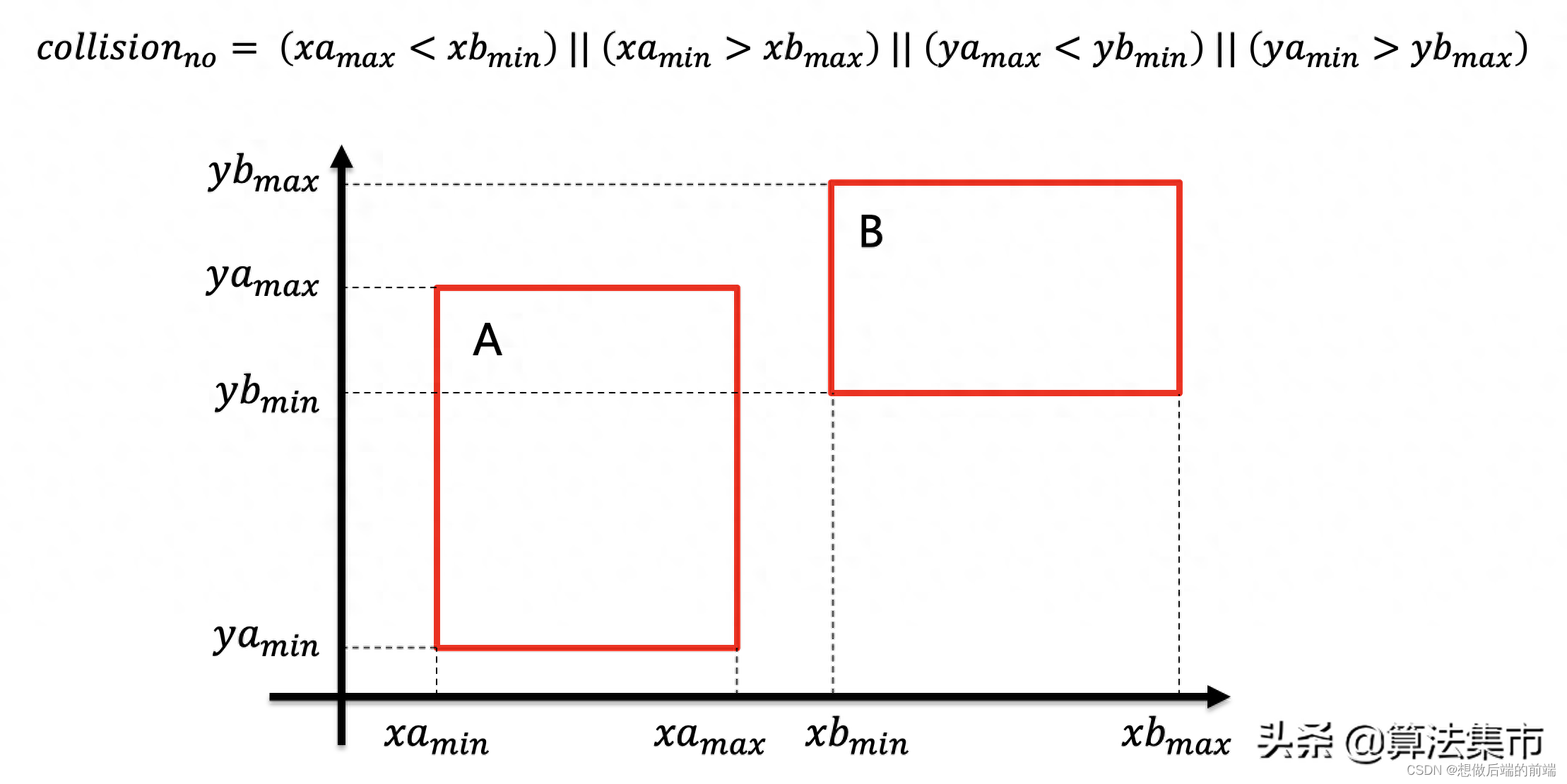
AABB碰撞检测指轴对齐碰撞箱(Axis-aligned Bounding Box),是分别从x轴向和y轴向进行碰撞检测的算法。即对于需要检测的物体A和物体B我们需要将其用A盒和B盒套起来,判断A盒和B盒在x轴向和y轴向是否发生碰撞,只有在x轴向和y轴向都发生碰撞我们才判断它发生了碰撞。
在轴对齐包围矩形(Axis Aligned Bounding Box,AABB)基础之上,更为准确的是 转向包围矩形(Oriented Bounding Box,OBB) OBB 与 AABB 的差别在于物体旋转之后,AABB的大小会发生改变,保证每条边与某个坐标轴平行;OBB 的大小则不会改变,且将随物体一起旋转。
2、OBB碰撞检测算法
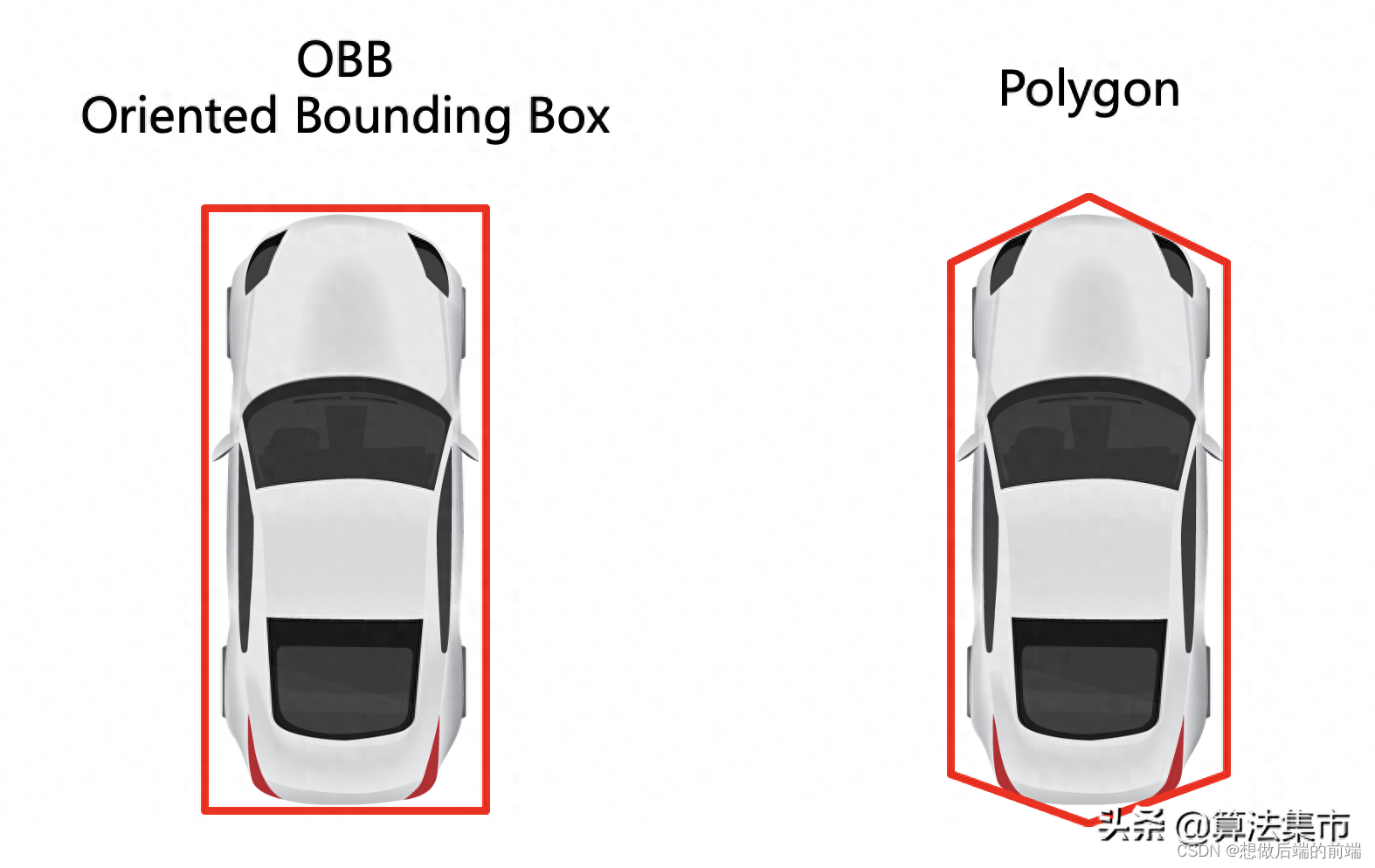
OBB 就是找一个最小的包围物体的矩形,这在自动驾驶系统中也是最常用的,感知模块给出物体的轮廓通常就是此形状。另外,为了准确描述物体轮廓,感知模块在 bounding box 的基础上,通常还会给出 polygon(多边形)的形式,如下图所示。
相对于AABB包围盒来讲,OBB在碰撞精度上要高于AABB,但是精确度的提高同时带来的就是效率的降低,OBB的算法无疑是要比AABB复杂的,同样内存消耗也会更大。
在了解OBB算法之前我们需要先学习一下分离轴定理。
分离轴定理(SAT):
分离轴定理(Separating Axis Theorem)的理论依据为超平面分离定理,即 令 A 和 B 是两个不相交的非空凸集,那么存在一个非零向量 v 和 实数 c,使得 <x, v> ≤ c 且 <y, v> ≥ c。其中,x 属于 A,y 属于 B。
简单来说,就是对于两个凸多边形,若存在一条直线将两者分开,则这两个多边形不相交。
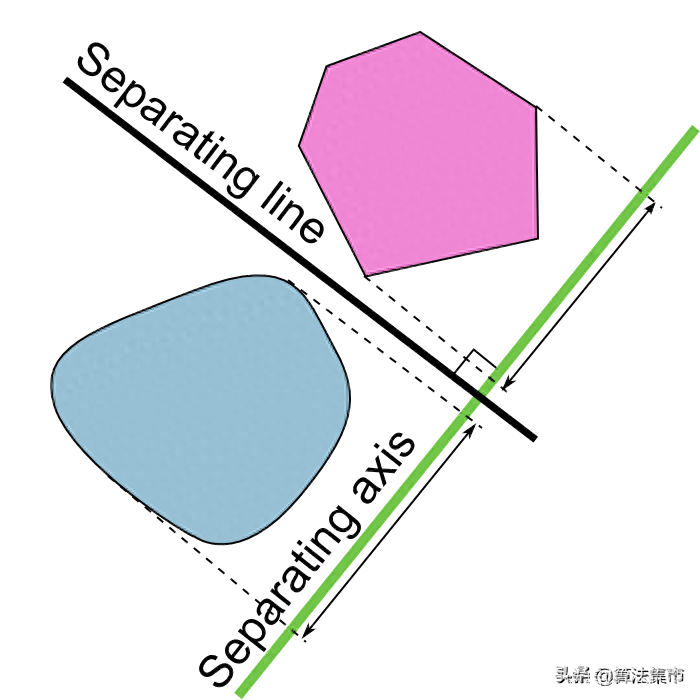
上图中的黑线为分离线(Seperating line),与之垂直的绿线为分离轴(Separating axis),图中虚线表示的是多边形在分离轴上的投影。
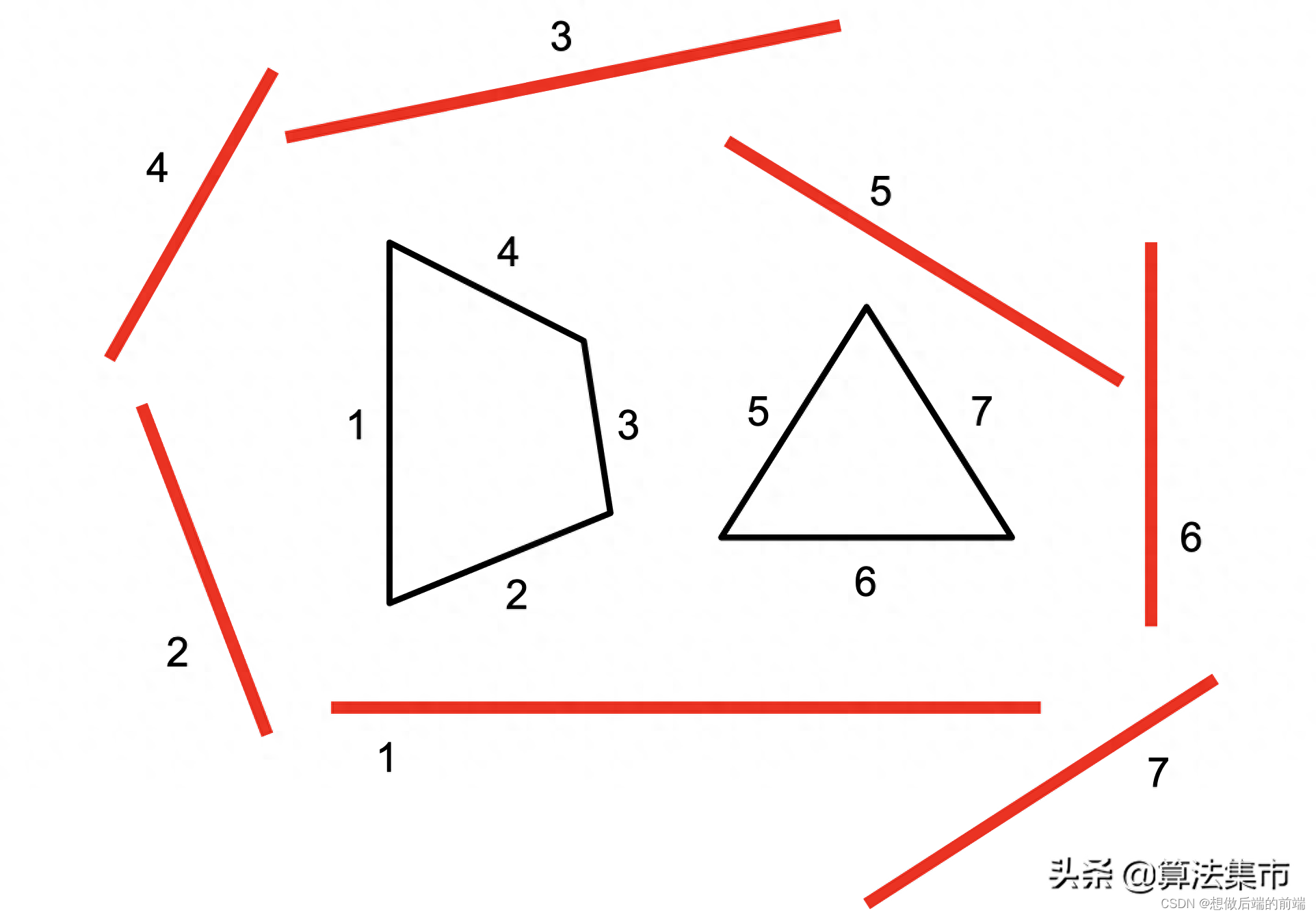
实际应用中,遍历所有角度的分离轴是不现实的,受益于多边形的性质,对于两个都是多边形的物体,只需要依次在每条边的垂直线做投影即可,如下图所示。
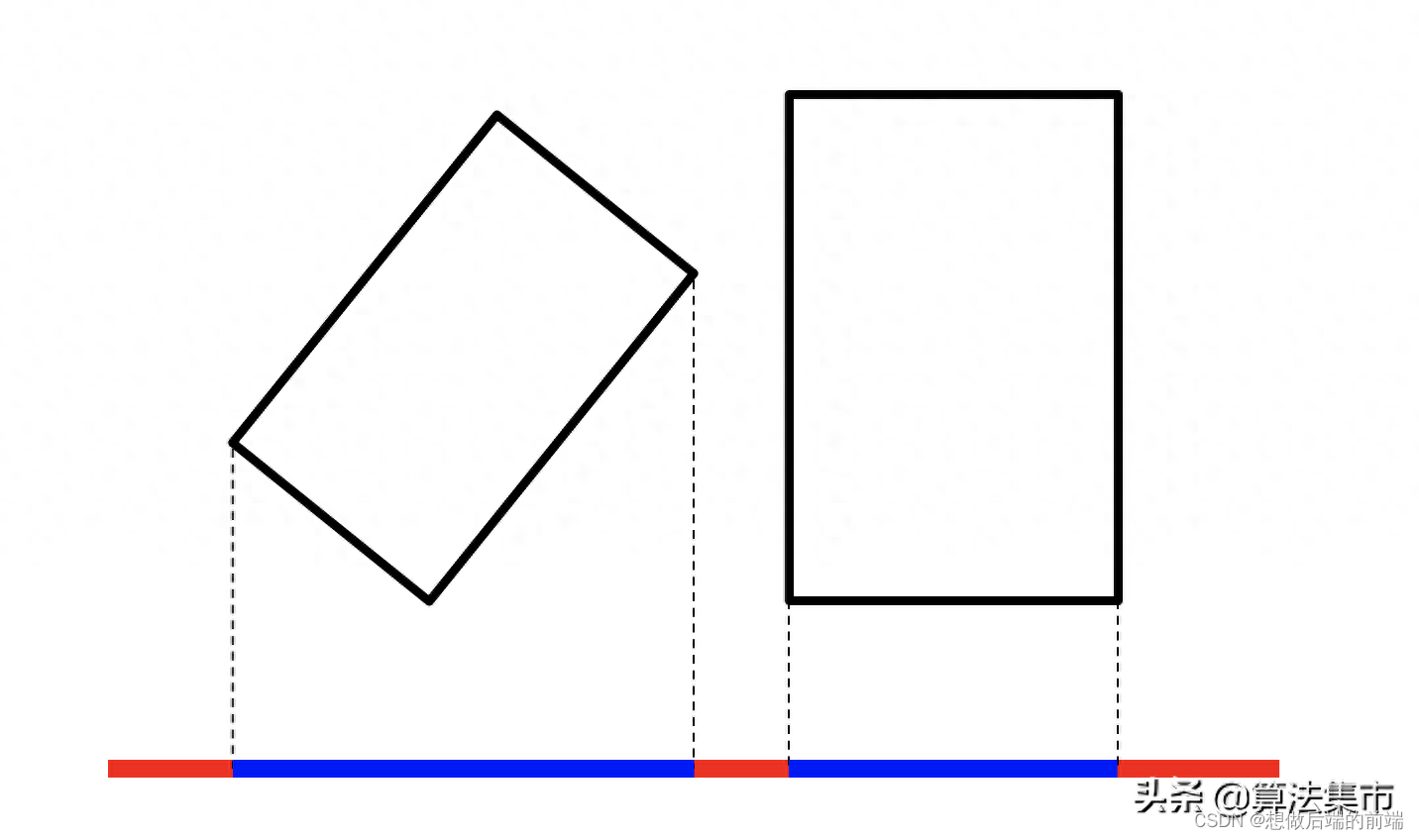
对于两个都是矩形的物体,则更简单,只需要做四次投影。
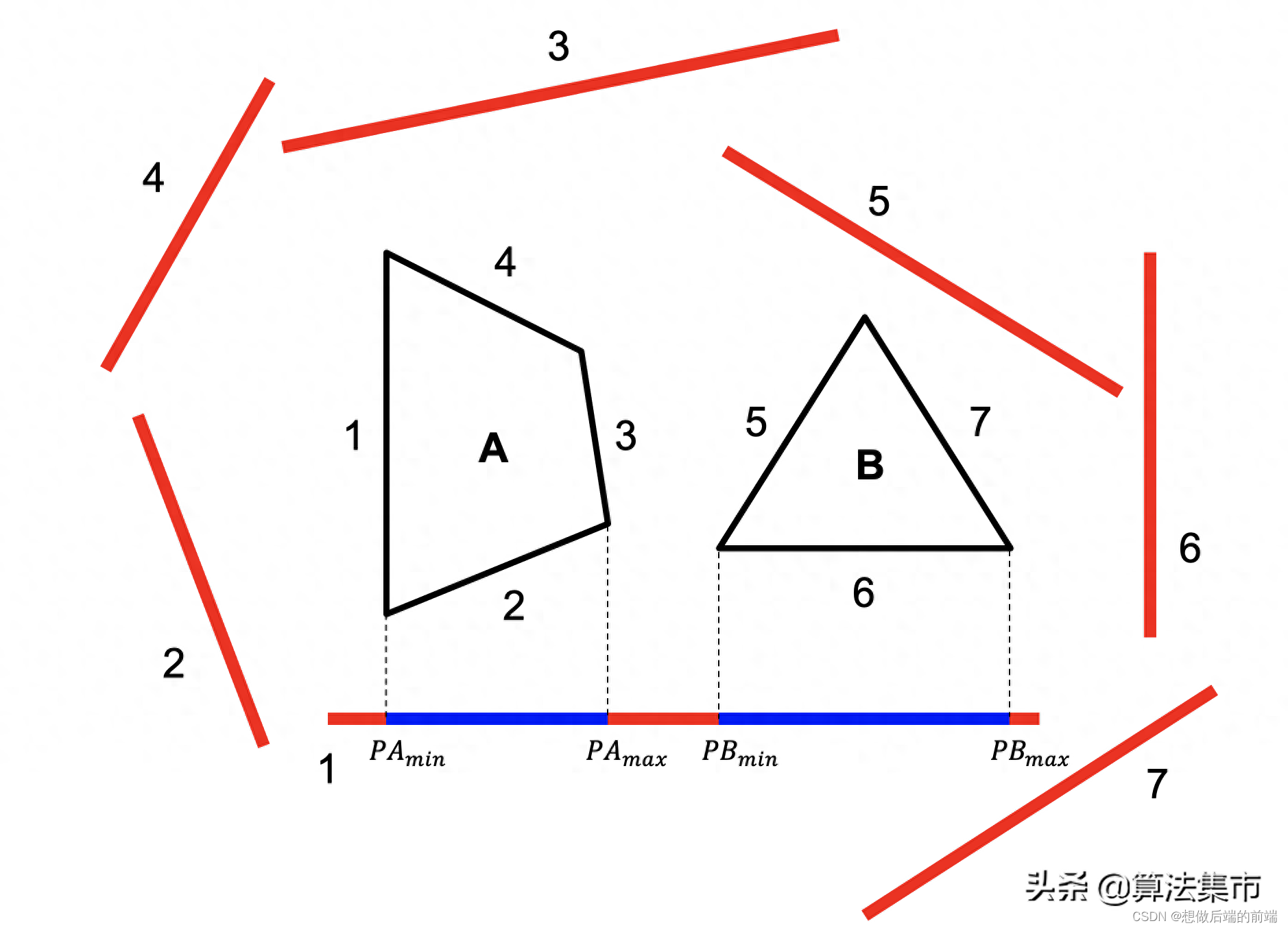
以下图中的两个多边形 A 和 B 为例,分离轴定理的具体步骤为:
- 首先根据边1的两个顶点位置坐标,计算出边1的向量,设为(x,y);
- 进而求出边1的法向量,作为分离轴,为(y, -x)或(-y,x)。若需要求两个多边形的最小分离距离,这里的法向量还需要化为单位向量;若只需判断两个多边形是否相交,则不需要化为单位向量;
- 依次将多边形 A 和 B的所有顶点与原点组成的向量投影到这个分离轴上,并记录两个多边形顶点投影到分离轴上的最小值和最大值(Pmin,Pmax),形成一个投影线段;
- 判断这两个投影线段是否发生重叠,若不重叠,则有 (PAmax < PBmin)||(PAmin > PBmax);
- 若两个投影线段不重叠,则代表存在这样一条直线将两个多边形分开,两个多边形不相交,可以直接退出循环;
- 若两个投影线段重叠,则回到步骤1,继续以边2的法向量作为分离轴,进行投影计算;
- 当两个多边形的所有边都检查完之后,找不到这样一条分离的直线,则意味着两个多边形相交。
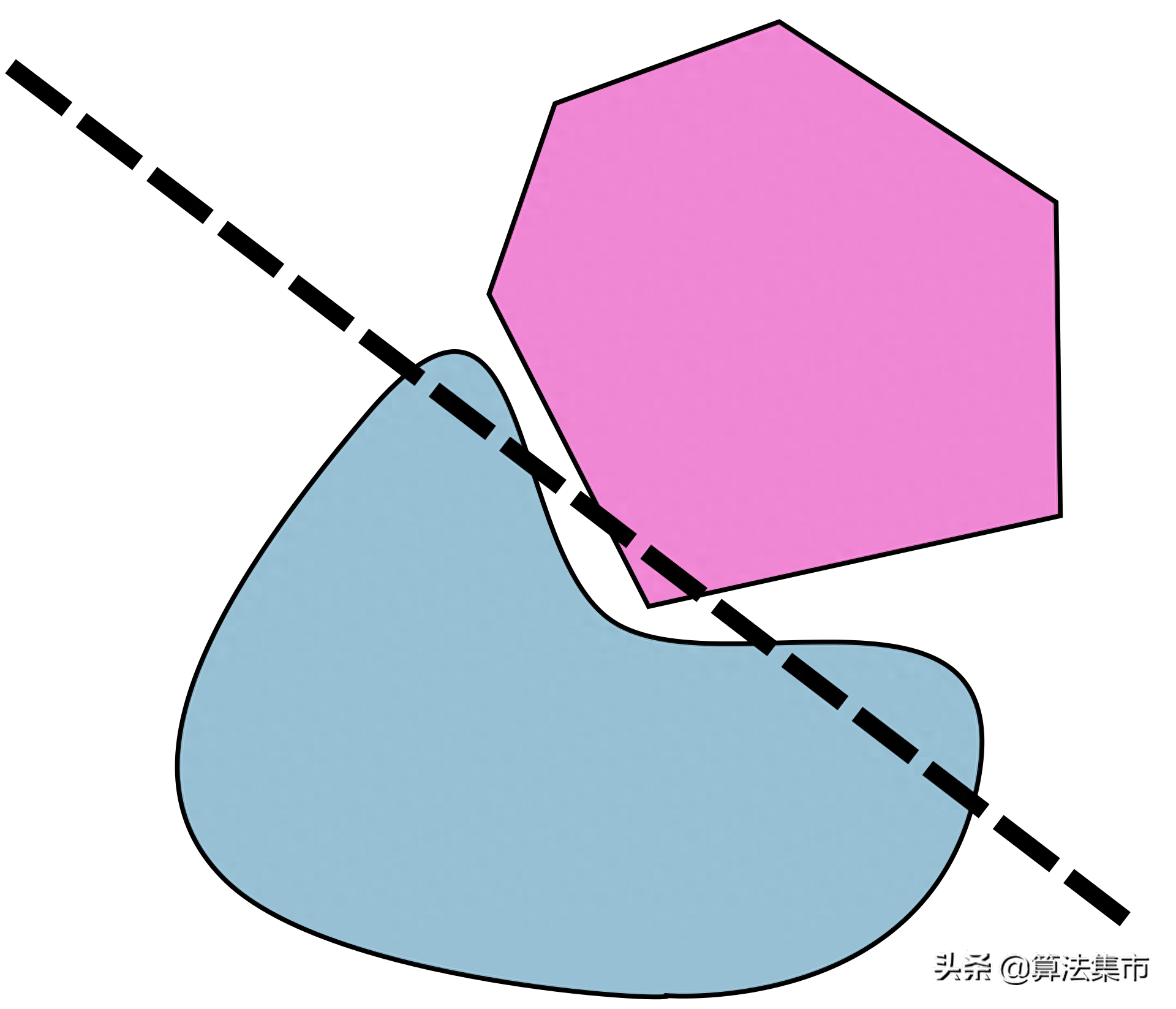
注意:分离轴定理是一种适用于凸多边形的碰撞检测算法,对于凹多边形则不适用,如下图所示,两个多边形没有碰撞,但找不到这样一条直线,能将两者分开。所以如果是凹多边形的话,需要先将其转换成多个凸多边形。
综上,分离轴定理是一种适用于 bounding box 和 polygon 的精细碰撞检测算法,其优点是算法原理简单,可准确判断两个多边形是否相交;缺点在于当多边形的边数较多时,该算法的效率较低(当两个多边形相交时,需要遍历完所有边进行判断)。
在实际应用中,为了提高效率,通常先使用 基于轴对齐包围矩形(AABB)的方法进行粗略的碰撞检测,然后再使用分离轴定理(SAT)做精细碰撞检测。
3、GJK(Gilbert–Johnson–Keerthi)算法
GJK是由Gilbert,Johnson,Keerthi 三位前辈发明的,用来计算两个凸多面体之间的碰撞检测,以及最近距离。GJK算法可以在O(M+N)的时间复杂度内,检测出碰撞,算法在每次迭代的过程中,都会优先选择靠近原点的方向,因此收敛速度会很快。算法的证明过程比较复杂,但是原理还是比较容易理解的。
相比 SAT 算法,GJK 算法更加高效。 GJK算法的核心就是闵可夫斯基差,即若两个多边形相交,则它们的闵可夫斯基差必然包括原点。
闵可夫斯基差,也可以叫做闵可夫斯基和,它的定义也很好理解,点集A与B的闵可夫斯基和被定义为:
A + B = {a + b |a∈A,b∈B}
如果 A 和 B 是两个凸多边形,则 A + B 也是凸多边形。
闵可夫斯基和从几何上的直观理解是A集合沿B的边际连续运动一周扫过的区域与B集合本身的并集,也可以是B沿着A的边界连续运动扫过区域与A自身的并集。
GJK算法用到的不是闵可夫斯基和,而是闵可夫斯基差,即:
A – B = {a – b |a∈A,b∈B}
虽然使用的是减法运算,但其仍然是闵可夫斯基和,相当于先对B中的所有点做负运算(相对原点的镜像),然后再与A做加法。
先来看两个例子。
对于两个不相交的多边形,shape1为矩形,shape2为三角形,如下图所示。
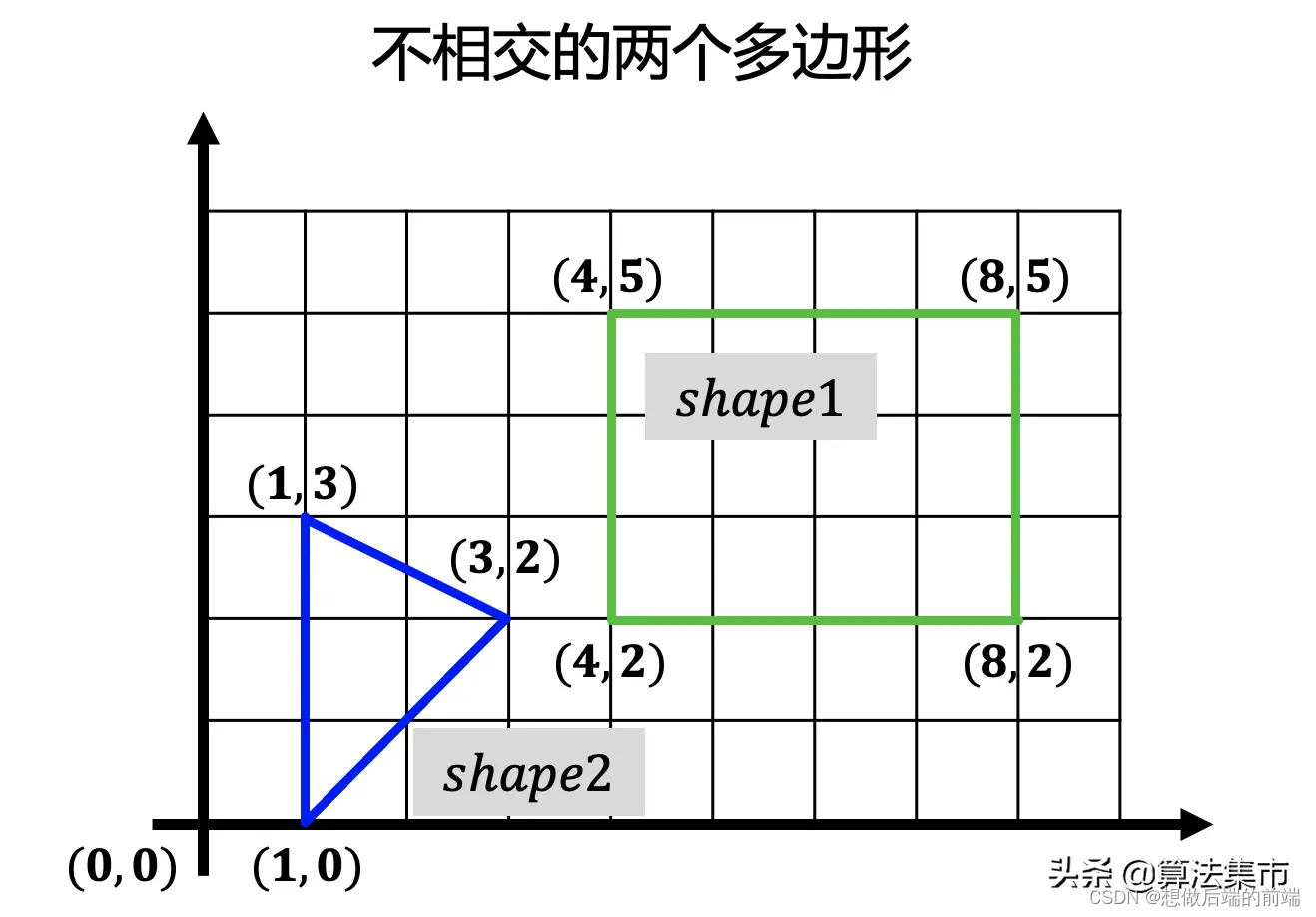
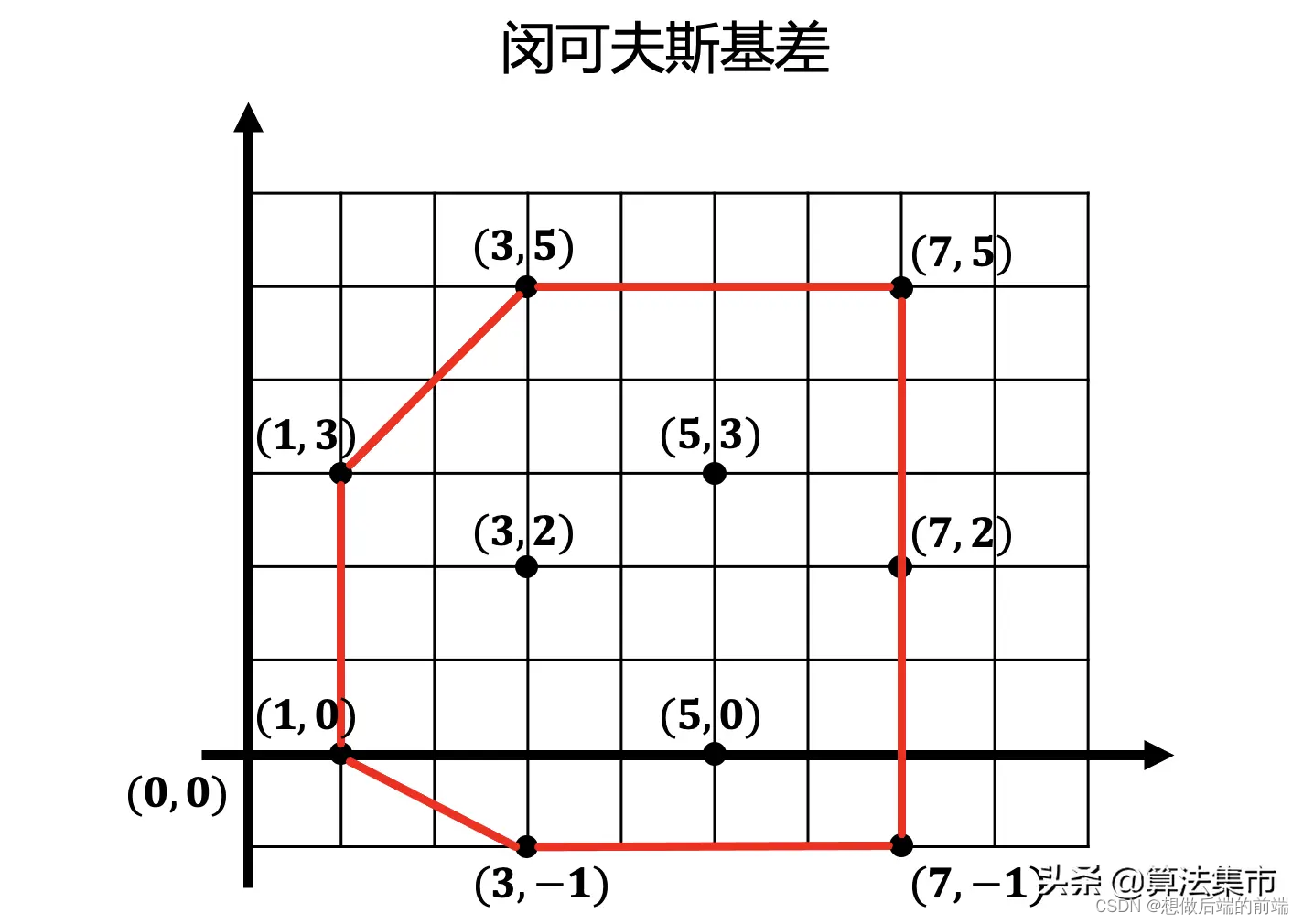
它们的闵可夫斯基差如下图所示,其闵可夫斯基差不包括原点,且两个多边形之间的距离就是其闵可夫斯基差到原点的距离。事实上,GJK 算法发明出来的初衷就是为了计算两个凸多边形之间的距离。
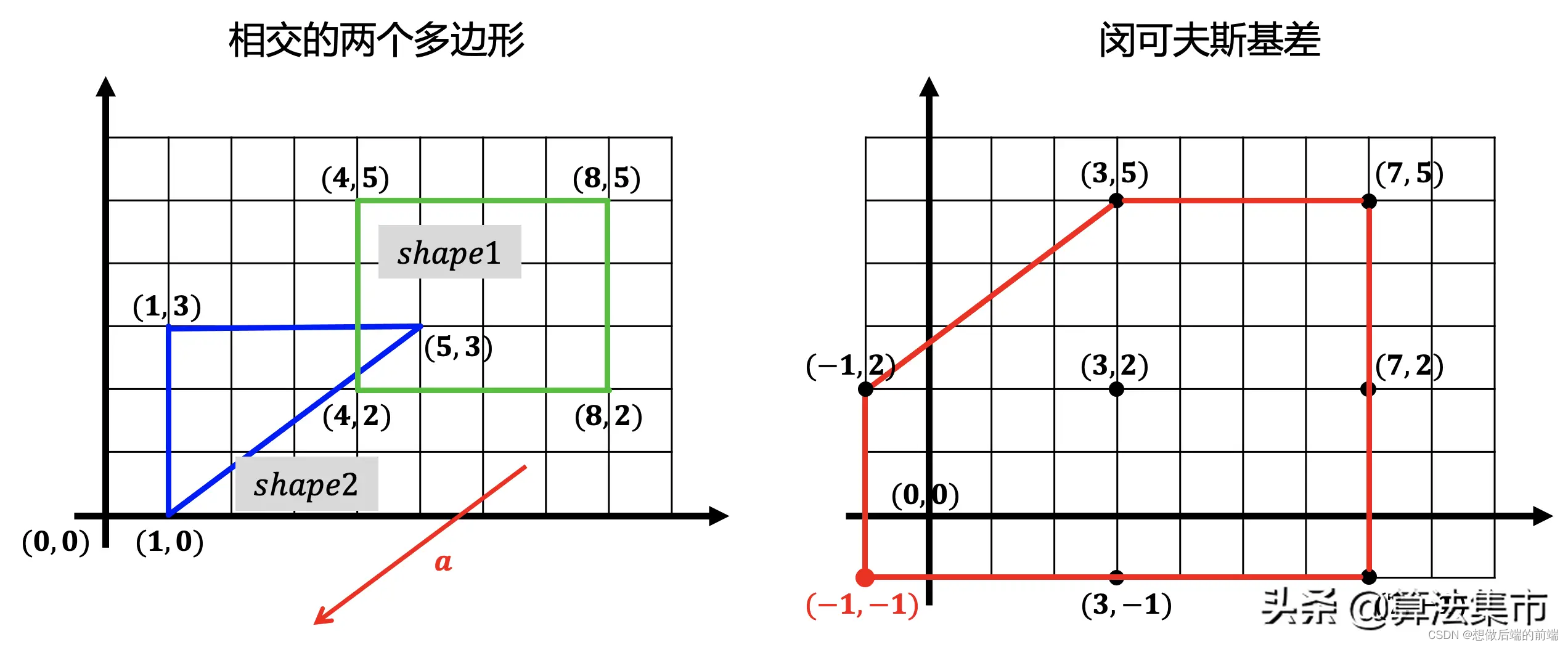
对于两个相交的多边形,shape1为矩形,shape2为三角形,如下图所示。
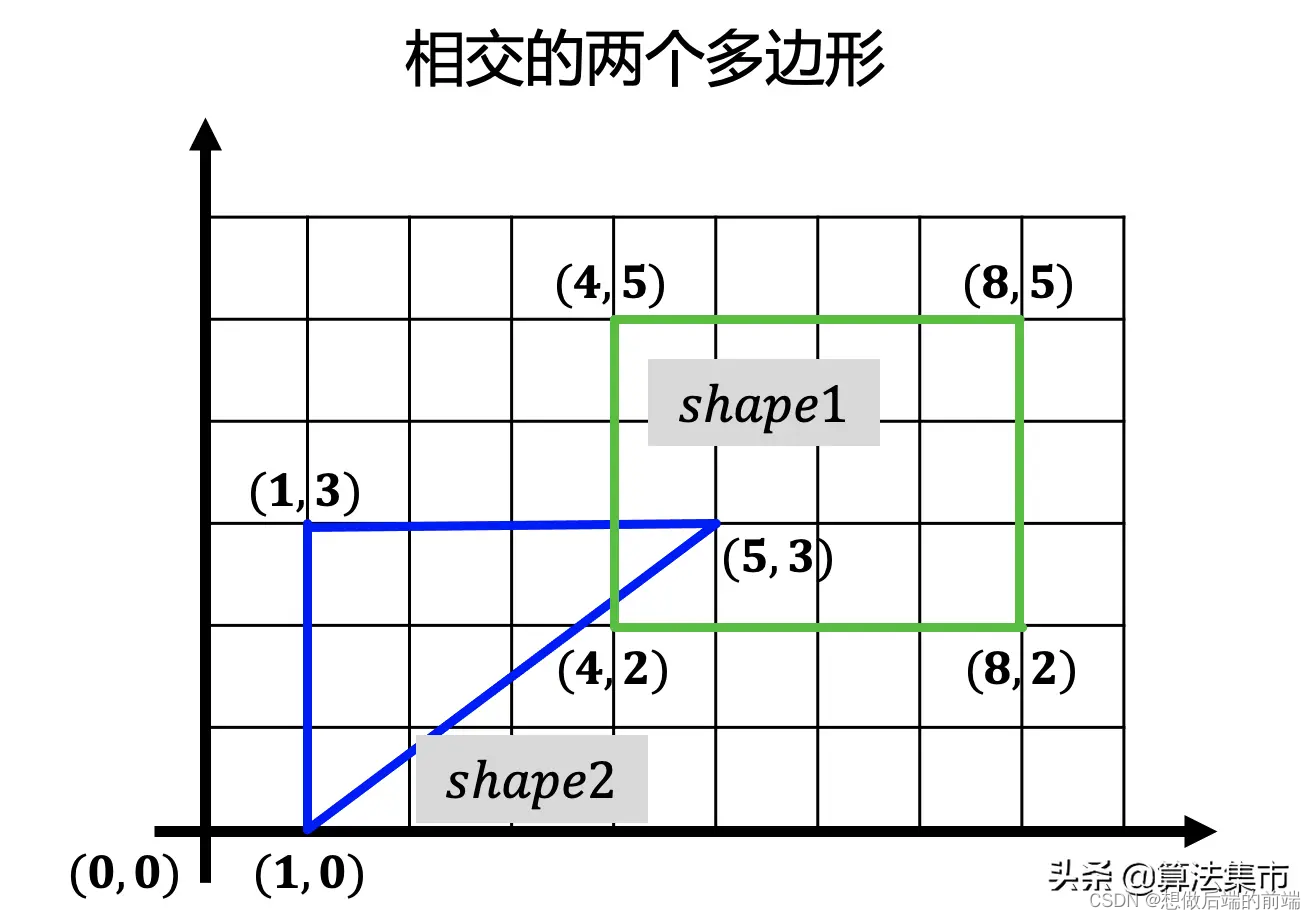
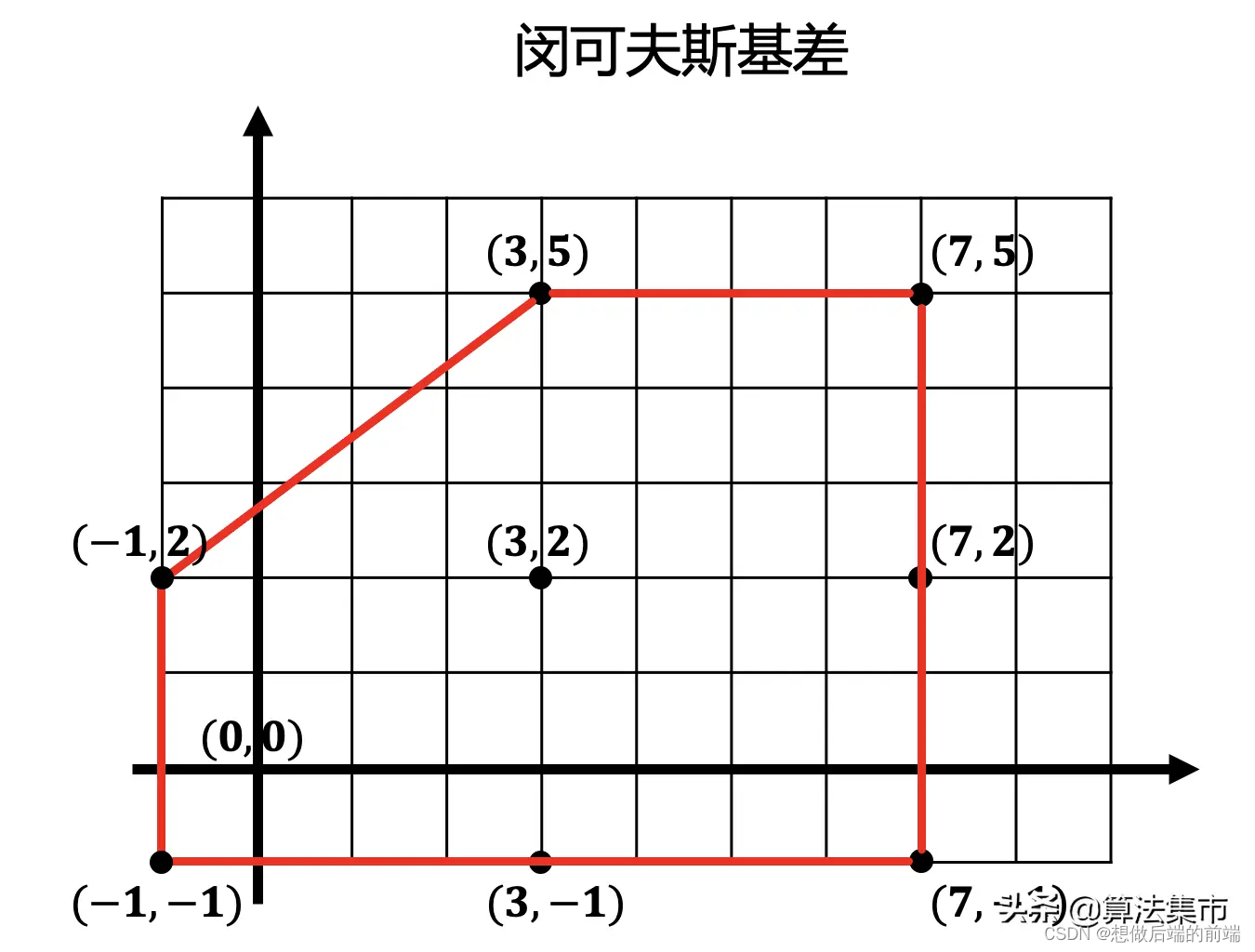
它们的闵可夫斯基差则如下图所示,可以看到,闵可夫斯基差是包括原点的。这也很好理解,两个相交的多边形,必然有一点既属于shape1,也属于shape2,相减则为原点(0,0)。
3.1 单纯形
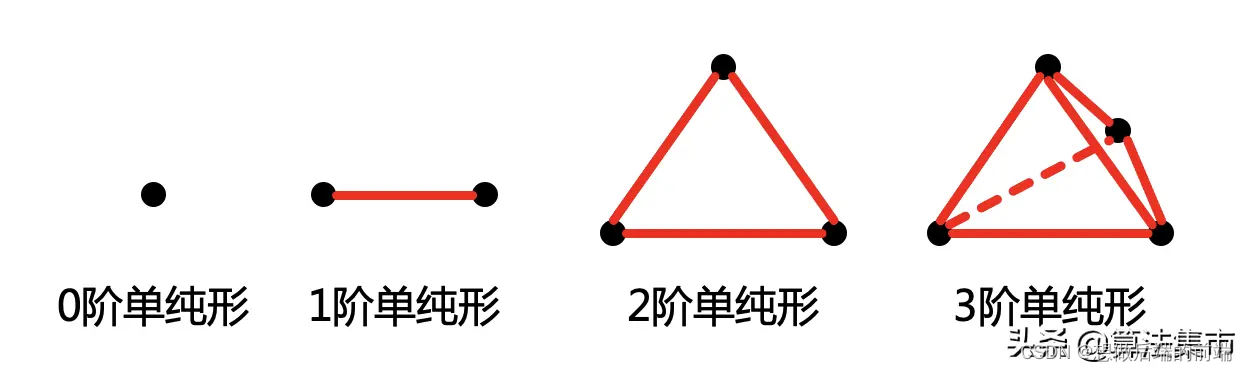
k阶单纯形(simplex),指的是k维空间中的多胞形,该多胞形是k+1个顶点组成的凸包。
在GJK算法中,单纯形被大量使用。单纯形指的是点、线段、三角形或四面体。例如,0阶单纯形是点,1阶单纯形是线段,2阶单纯形是三角形,3阶单纯形是四面体。
对于2维空间的多边形,最多用到2阶单纯形。那单纯形到底有什么作用呢?
对于上面两个相交的多边形例子,实际应用中,其实不需要求出完整的闵可夫斯基差,只需要在闵可夫斯基差内形成一个多边形,如下图所示,并使这个多边形尽可能包围原点,这个多边形就称为单纯形。即假如单纯形包围原点,则闵可夫斯基差必然包围原点。
3.2 Support 函数
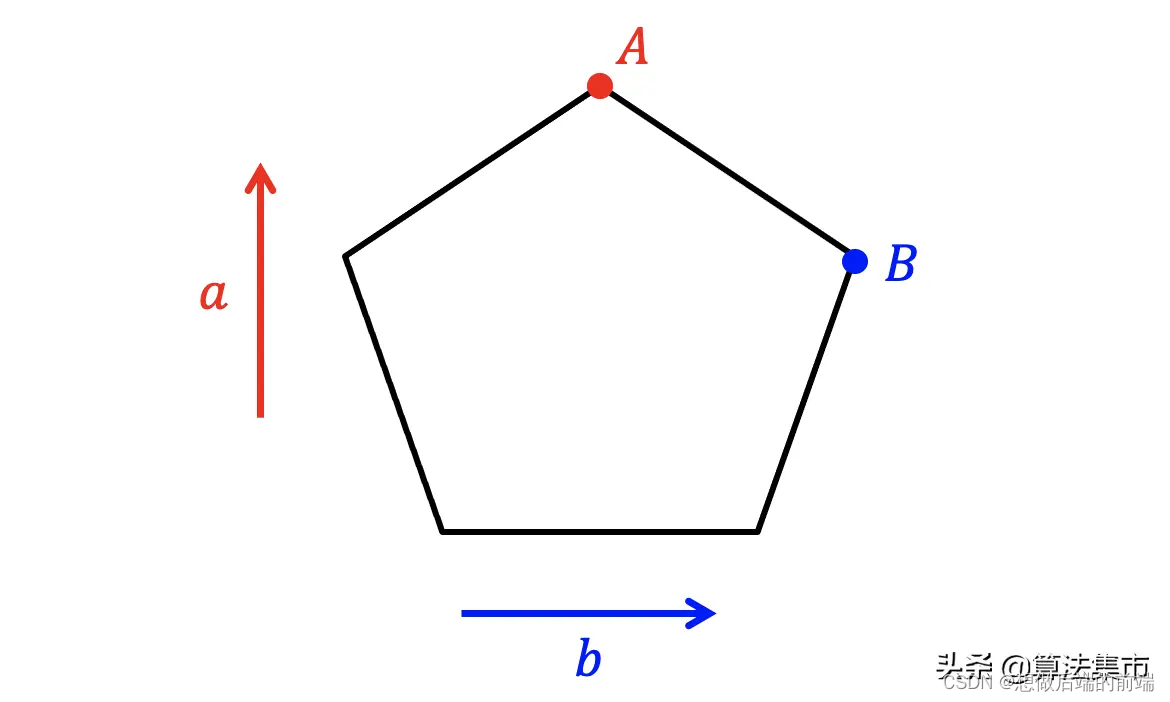
Support函数的作用是计算多边形在给定方向上的最远点。如下图所示,在向量 a 方向的最远点为 A 点,在向量 b 方向的最远点为 B 点。这里在寻找给定方向上的最远点时,需要用到向量的点乘。
为什么需要Support函数呢?这是因为在构建单纯形时,我们希望尽可能得到闵可夫斯基差的顶点,而不是其内部的一个点,这样产生的单纯形才能包含最大的区域,增加算法的快速收敛性。
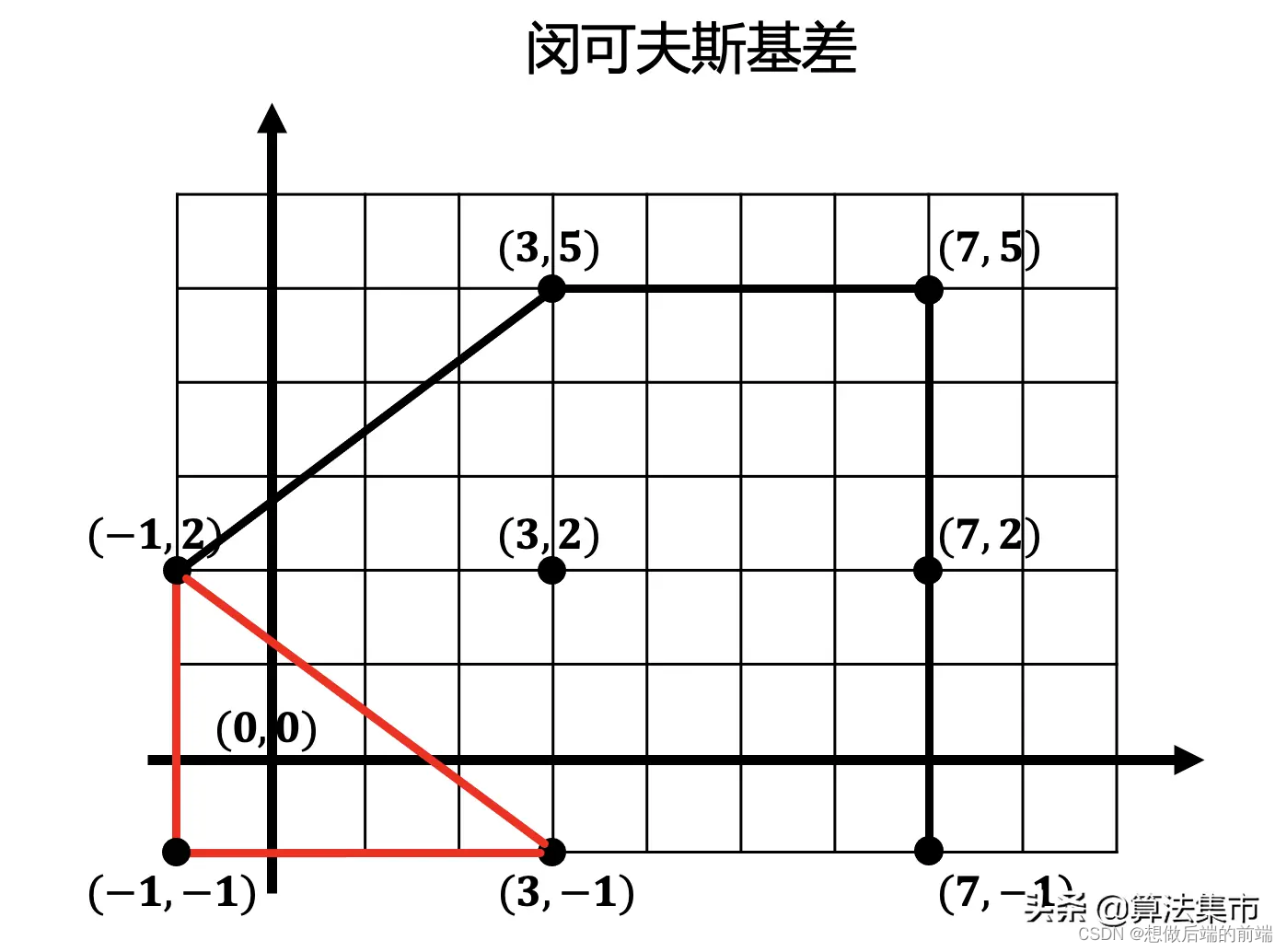
如下图所示,在给定向量 a 方向上,shape1 的最远点为(4,2),在向量 -a 的方向上,shape2 的最远点为(5,3),这两个点作差即得到点(-1,-1)。利用这种方式得到的点都在闵可夫斯基差的边上。