本文为2023年第十八届中国研究生电子设计竞赛作品分享,参加极术社区的【有奖活动】分享2023研电赛作品扩大影响力,更有丰富电子礼品等你来领!,分享2023研电赛作品扩大影响力,更有丰富电子礼品等你来领!
基于EtherCAT通信有限时间位置收敛伺服系统
参赛单位:浙江工业大学
指导老师:陈强 吴春
参赛队员:沙为民 吴辰浩 申屠方婷
作品简介
针对高动态性能、高稳态精度的伺服系统,设计了有限时间位置控制器,实现了系统在变化的位置指令下,柔顺地从当前位置运动至目标位置。针对伺服驱动器电流传感器故障,设计了基于镜像电流方法的相电流传感器容错控制策略,提高了伺服驱动器的可靠性。最后,基于STM32微控制器,构建EtherCAT通讯主、从站,相比于传统通信方式,EtherCAT通信具有数据传输速率快、传输距离远等优势,可实现多伺服系统的集中控制。项目组已与相关企业建立合作关系,目前所研制伺服系统产品正处于生产测试阶段。

作品全貌

硬件设计
AltiumDesigner16工程文件:
链接:https://pan.baidu.com/s/1h\\\\_XcD3mWV6ojSA6npx0fTQ
提取码:ggby
该控制电路主要功能是伺服电机运动控制,以及RS485;ETHERCAT通讯控制,按键板等。
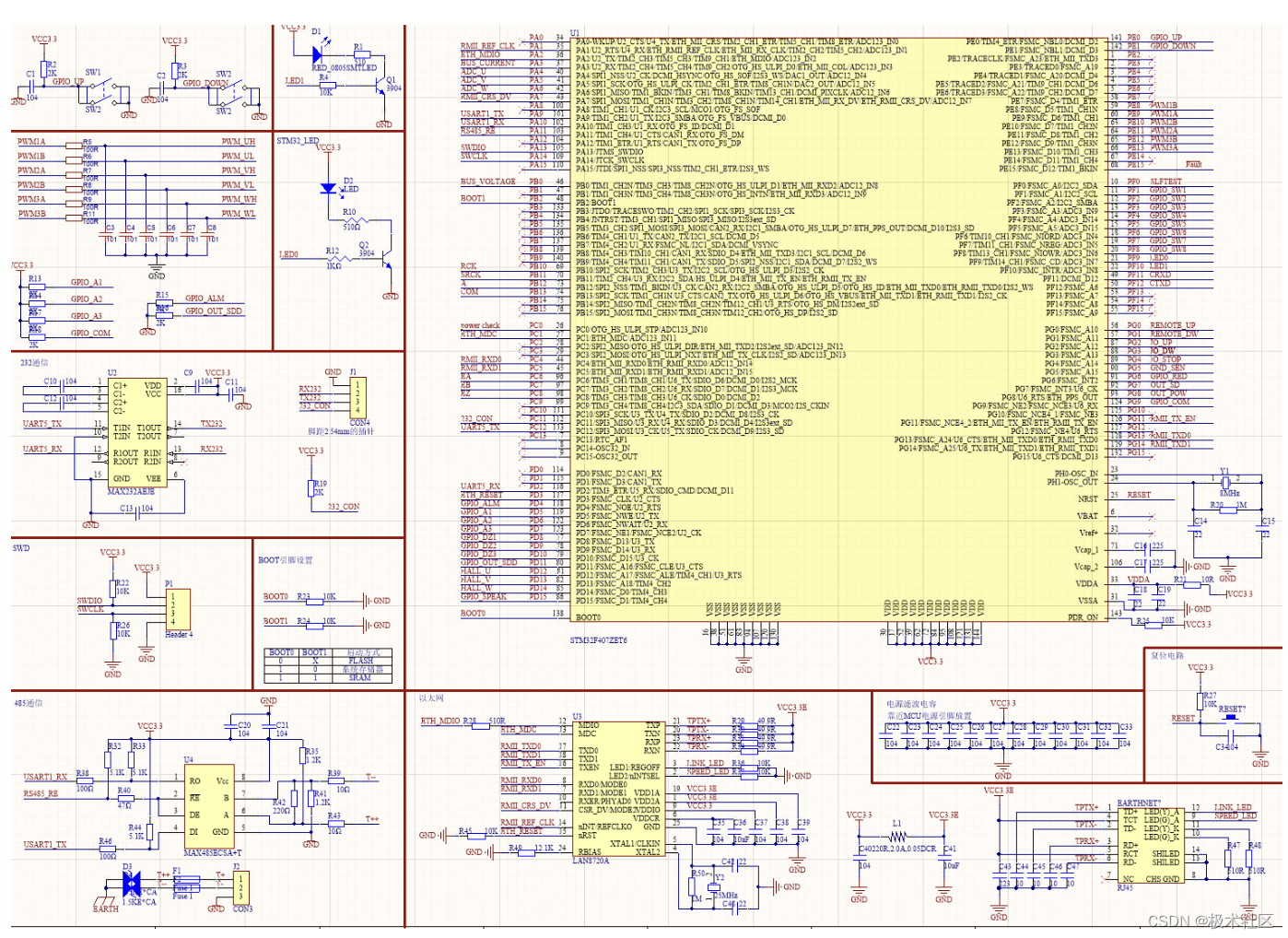
其中主控使用的是STM32F407ZET6,电机采用永磁同步电机,驱动器采用的是IR2106S,编码器采样芯片AM26LS32C四路差分驱动芯片,数码管显示功能电路采用74HC595和TPIC6B595移位寄存器,RS485通信接口芯片MAX485ECSA+T与RS-485总线连接,以太网芯片采用LAN8720A。

软件设计
本项目采用最为常用的基于控制的永磁同步电机伺服系统控制方法,该方法因没有直轴电流,电机没有直轴电枢反应,不会使永磁体退磁,电机所有电流均用来产生电磁转矩,电流控制效率高。本项目要求伺服电机的过载能力强、动态响应快、转矩线性度高、控制方法简单可靠,因此选用表贴式永磁同步电机。
为了保证伺服道闸系统的精确控制,本实验通过位置、速度、电流三环控制,伺服电机能够实现快速的动态响应、较高的转矩线性度、可靠的控制以及较强的带载能力。然而,PI调节始终无法在不同负载、不同转速要求、不同位置给定下实现快速性与零超调量并存。
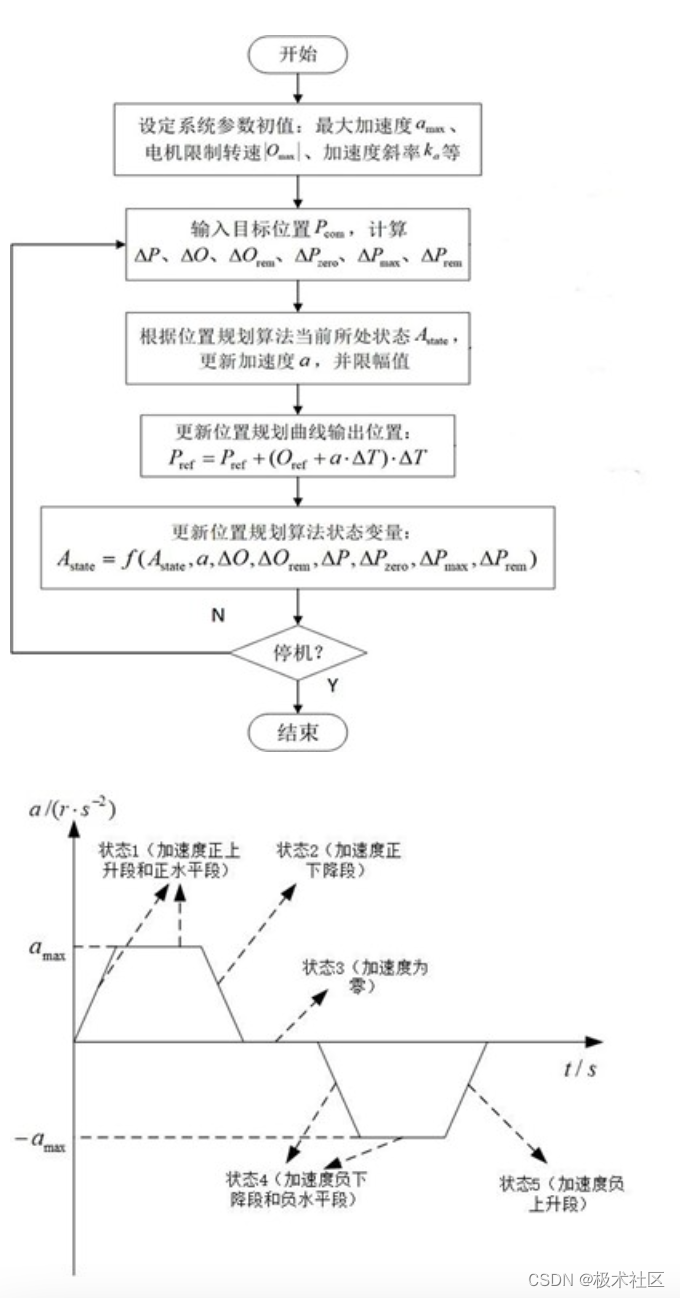
本项目使用的一种加速度连续的实时位置规划控制方法,具有计算简便和实时性强的优点,只需要根据目标位置和当前状态进行判断和简单的运动过程计算处理,避免了复杂运算,简化了计算过程。同时,在每一控制周期内,在加速度连续的前提下,根据最新的目标位置,进行状态判断和位置规划,能够实时跟随快速变化的位置指令,适用于高动态性能的伺服系统。
系统测试
- 位置环S曲线测试
外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传
2.有限时间收敛测试

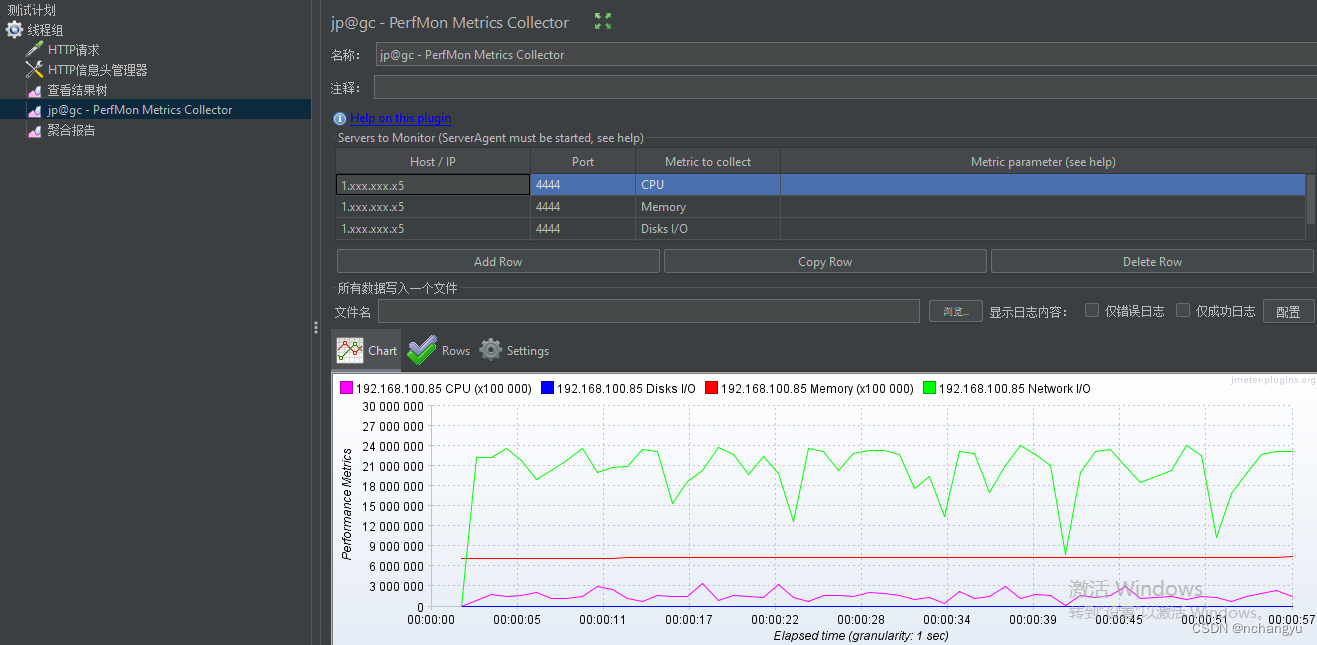
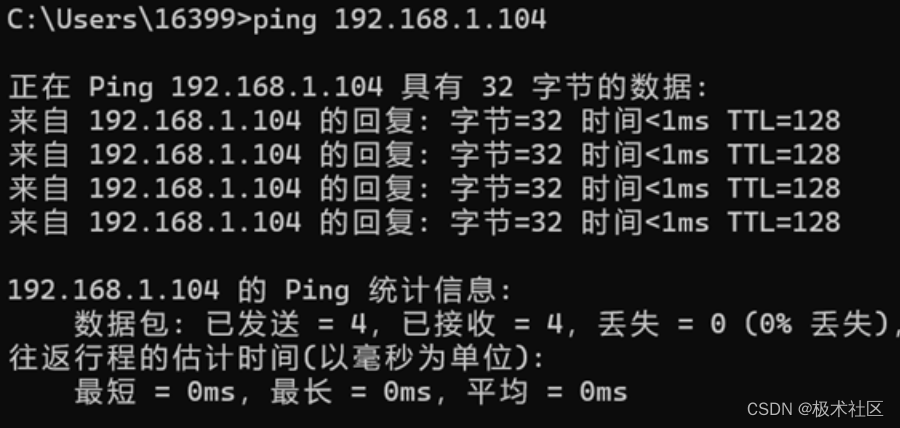
- 以太网通信测试
视频演示
链接:https://pan.baidu.com/s/1WZ9u7BneO\\_qE8wvwJ5BPUA
提取码:hhdd
总结
本文以道闸项目为研究背景,设计一款基于EtherCAT通信有限时间位置收敛的伺服系统。针对高速度、高控制精度、高效率的要求,对伺服驱动器的方案论证、硬件设计和软件设计等方面进行了分析研究。概括起来,本文主要完成了以下工作:
(1)运用加速度连续的实时位置规划控制方法,既解决了基于连续加速度的S型位置规划曲线算法在位置伺服系统运动规划控制出现的运算复杂问题,又解决了不能适应位置指令快速变化等问题,保证道闸系统运行的稳定性。
(2)运用了有限时间收敛算法,系统在有限时间内就能够达到相应的稳定状态,提高了系统响应速度,保证道闸系统运行的快速性。
(3)运用EtherCAT通信技术,提高控制器和驱动器之间的数据传输速度及可靠性,更好满足伺服系统对实时性和同步性的要求,实现伺服驱动系统网络化控制。
(4)本项目设计的伺服驱动器具有电流传感器的容错能力,可以保证系统在出现断线故障时仍能正常工作,增加了伺服驱动器的使用寿命。
(5)本项目设计的伺服系统的PCB板,合理设置布局布线和散热布局,最大程度的节省了成本,提高了伺服驱动器的集成度和功率密度。
参赛感悟
1、感谢组委会、各承办单位
2、南京理工的饭菜很不错。
3、志愿者们辛苦了
4、非常难忘的参赛经历
参加极术社区的【有奖活动】分享2023研电赛作品扩大影响力,更有丰富电子礼品等你来领!,分享2023研电赛作品扩大影响力,更有丰富电子礼品等你来领!
更多研电赛作品分享请关注IC技术竞赛作品分享。

![[面试] k8s面试题 2](https://img-blog.csdnimg.cn/38d5cac439894d3eb3a90e71d54fc706.jpeg#pic_center)