压力传感器:E+H PMX5x/FMX5x
一、安装:安装注意事项:
1、水平安装时仪表的呼吸孔(1)需要向下安装,并远离污染物。
2、请勿用坚硬的物体擦拭或接触膜片。
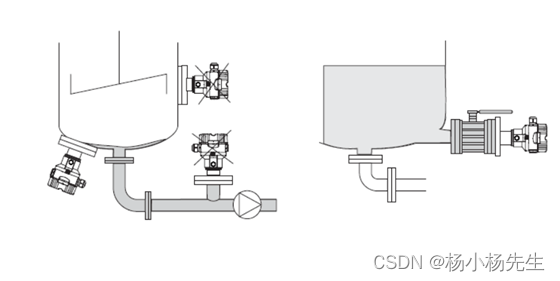
3、请勿安装在水泵的入口和搅拌叶附近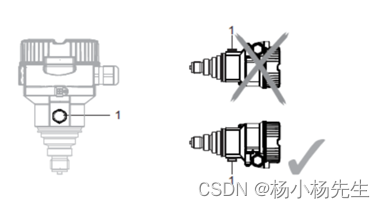
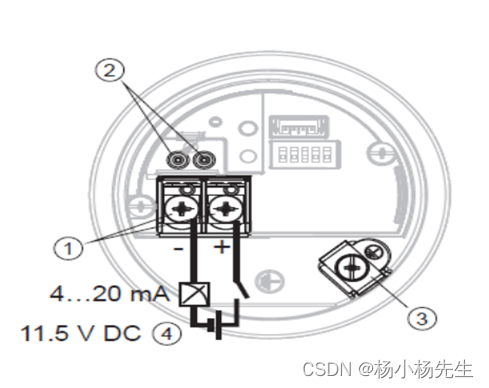
二、供电、接线、信号、:二线制,仪表输出4-20mA
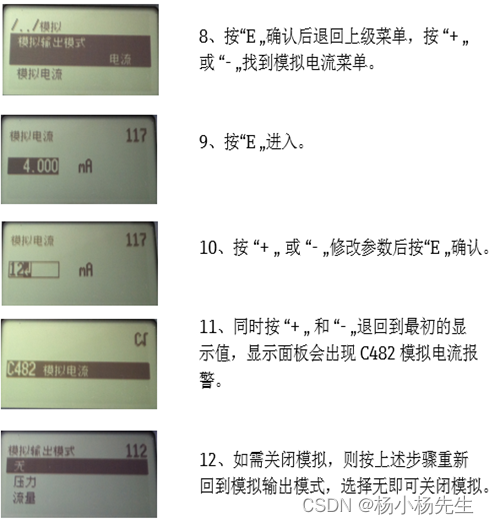
三、量程:设置最大最小量程0-1Bar
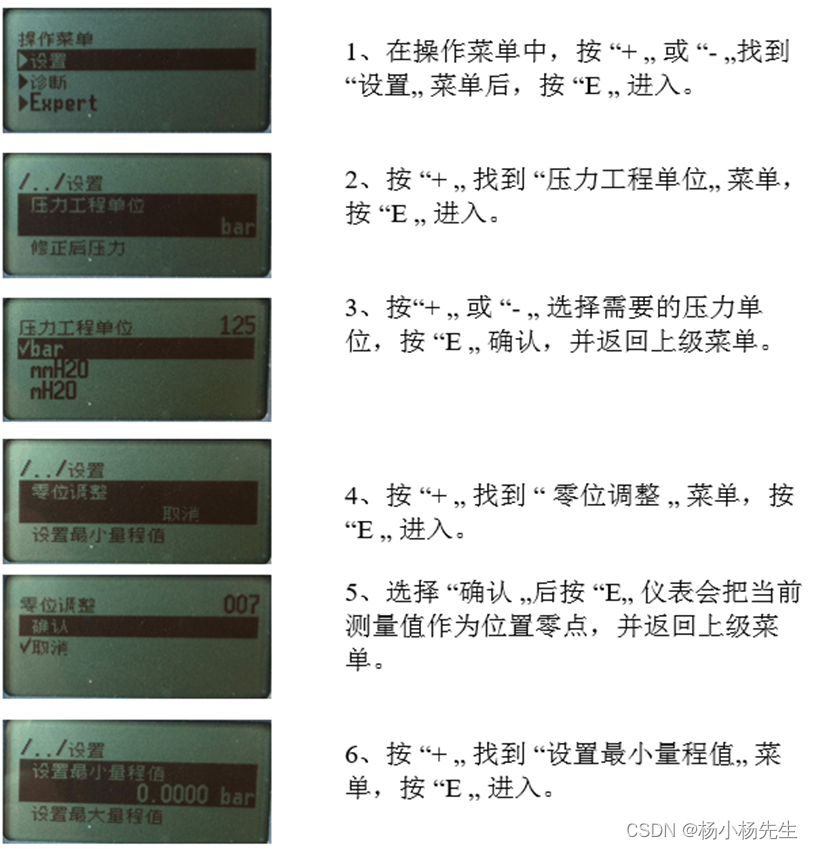

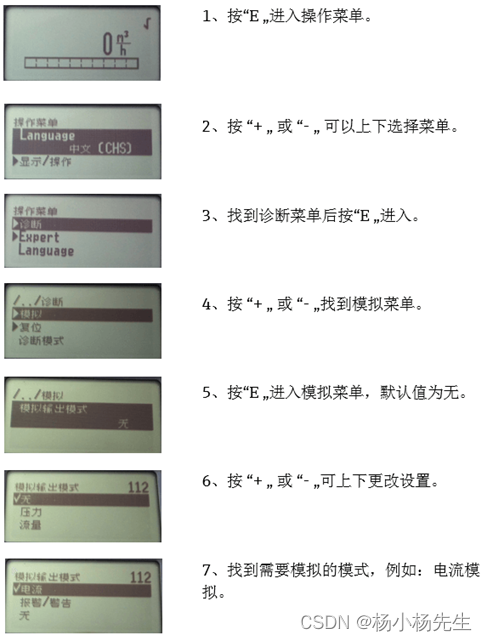
四、调校(标定):关闭仪表前阀门,打开排污阀,零点调整。
操作菜单-设置-零点调整-选择确认

操作菜单-设置-零点调整-选择确认
五、排污:关闭仪表前阀门,打开排污阀,压力传感器前没阀门的要将罐体排空,打开排污阀
六、熟悉维护要求:
1、水平安装时仪表的呼吸孔(1)需要向下安装,并远离污染物。
2、请勿用坚硬的物体擦拭或接触膜片。
3、请勿安装在水泵的入口和搅拌叶附近。
4、接线要确认断电状态下接线,避免烧毁模拟量输入模块。
5、检修定期零点标定、排废。
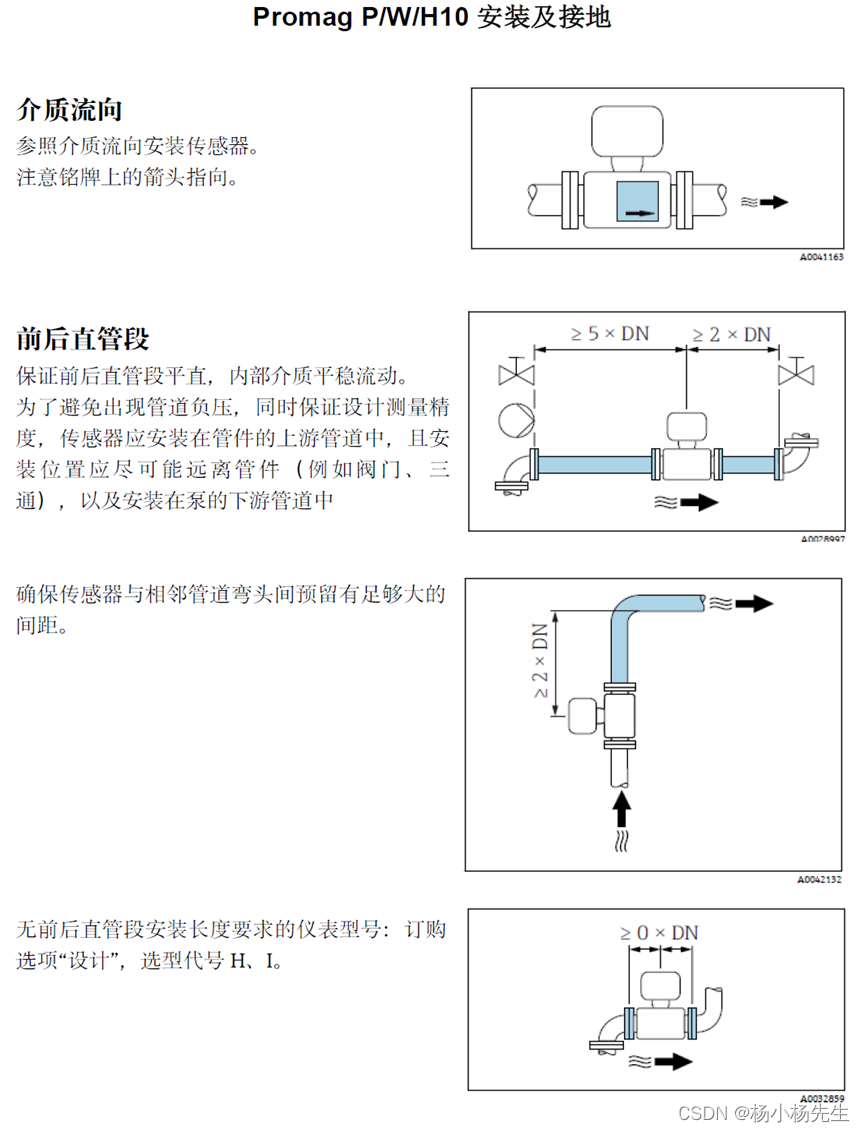
电磁流量计 Promag PW/H10
一、安装: