【PX4】PX4第一个offborad例程
文章目录
- 【PX4】PX4第一个offborad例程
- 1. 什么是OFFBOARD
- 2. 第一个offboard例程
- 3. 编写launch文件
- Reference
1. 什么是OFFBOARD
PX4的OFFBOARD指的是外部控制模式,飞行器根据飞行控制栈外部(如机载计算机)提供的设定值控制位置、速度、加速度、姿态以及推力/力矩。设置值可以经由 MAVLink 提供。
PX4要求外部控制器提供2Hz(至少是2Hz)连续的“有效存在”信号,该信号可由任意支持的 MAVLink 设置点消息或ROS 2 OffboardControlMode 消息提供。 PX4只有在收到该种信号超过1秒后才有效,如果该种信号停止飞行控制栈将重新获得控制权(脱离Offboard模式)。
一些注意点:
- Offboard模式通过设置位置、速度、加速、姿态、姿态角速率或力/扭矩设置点来控制飞行器的移动和姿态。
- PX4 必须能够以2Hz的速率连续收到 MAVLink 设置点消息或 ROS 2 OffboardControlMode 消息以确保外部控制器是正常运行的。 该消息必须已经持续发送1秒钟以上PX4才能在Offboard模式下解锁或在飞行中切换至Offboard模式。 如果在外部控制器给出的指令速率低于2Hz,PX4将在超时(COM_OF_LOSS_T)后退出Offboard模式,并尝试降落或执行其他一些失败保护行为。 失效保护行为取决于RC遥控器是否可用,依据参数 COM_OBL_RC_ACT 的设定。
- 当使用 MAVLink 时,设定值消息既传达了指示外部控制器"正常运行"的信号也传达了设定值本身。 Offboard模式下要保持位置,飞行器必须接收到一个包含当前位置设定值的消息指令。
- 当使用 ROS 2 时,外部控制器运行正常通过监测 OffboardControlMode 消息流确保,真实设定点由发布任一包含设定值的uORB消息提供,例如 TrajectorySetpoint。 在这种情况下保持当前位置,飞行器必须收到连续的 OffboardControlMode 消息,但只需要收到 TrajectorySetpoint 消息一次。
- 请注意,Offboard模式只支持非常有限的 MAVLink 命令和消息。 其他操作如起飞、降落、返航,最好使用适当的模式来处理。 像上传、下载任务这样的操作可以在任何模式下执行。
2. 第一个offboard例程
本教程使用 Gazebo Classic 模拟的Iris四旋翼无人机,用MAVROS Python来展示 OFFBOARD 控制的基础知识。
首先创建一个工作空间并进行初始化
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ..
catkin_make
然后在这个工作空间下创建一个功能包,命名为sitl_study依赖rospy
cd ~/catkin_ws/src
catalkin_create_pkg sitl_study rospy
再在功能包中创建我们的scripts目录用于存放python脚本
roscd sitl_study
mkdir scripts
cd scripts
进入scripts目录,创建我们的可执行脚本,命名为offb_node.py,并且添加可执行权限
touch offb_node.py
chmod +x offb_node.py
然后打开offb_node.py添加下面的代码
#! /usr/bin/env python
#-*- coding: UTF-8 -*-
import rospy
from geometry_msgs.msg import PoseStamped
from mavros_msgs.msg import State
from mavros_msgs.srv import CommandBool, CommandBoolRequest, SetMode, SetModeRequest
current_state = State()
def state_CB(msg):
global current_state
current_state = msg
if __name__ == "__main__":
# initialize ros node
rospy.init_node('offb_node_py')
# state subscriber
state_sub = rospy.Subscriber('/mavros/state', State, callback=state_CB)
# pose publisher
local_pose_pub = rospy.Publisher('/mavros/setpoint_position/local', PoseStamped, queue_size=10)
# arming client
arming_client = rospy.ServiceProxy('/mavros/cmd/arming', CommandBool)
arming_client.wait_for_service()
# mode client
setmode_client = rospy.ServiceProxy('/mavros/set_mode', SetMode)
setmode_client.wait_for_service()
# setpoint publishing MUST be faster than 2HZ
rate = rospy.Rate(20)
# wait for Flight Controller connection
while (not rospy.is_shutdown() and not current_state.connected):
rate.sleep()
# set point
pose = PoseStamped()
pose.pose.position.x = 0
pose.pose.position.y = 0
pose.pose.position.z = 2.0
# send a few setpoints before starting
for i in range(20):
if(rospy.is_shutdown()):
break
local_pose_pub.publish(pose)
rate.sleep()
# set OFFBOARD mode
offb_set_mode = SetModeRequest()
offb_set_mode.custom_mode = 'OFFBOARD'
# arm vehicle
arm_cmd = CommandBoolRequest()
arm_cmd.value = True
# request time
last_req = rospy.Time.now()
while(not rospy.is_shutdown()):
if (current_state.mode != "OFFBOARD" and (rospy.Time.now() - last_req) > rospy.Duration(5.0)):
if(setmode_client.call(offb_set_mode).mode_sent == True):
rospy.loginfo(">>>>>> OFFBOARD enabled >>>>>>")
last_req = rospy.Time.now()
else:
if(not current_state.armed and (rospy.Time.now() - last_req) > rospy.Duration(5.0)):
if(arming_client.call(arm_cmd).success == True):
rospy.loginfo(">>>>>> Vehicle armed >>>>>>>")
last_req = rospy.Time.now()
local_pose_pub.publish(pose)
rate.sleep()
在CMakelists.txt中添加节点路径,如下所示
#############
## Install ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
catkin_install_python(PROGRAMS
scripts/offb_node.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
修改完毕之后,我们首先进行编译
cd ~/catkin_ws
catkin_make
source ./devel/setup.bash
然后我们就可以测试是否编写成功了,首先启动
roslaunch px4 mavros_posix_sitl.launch
然后再启动
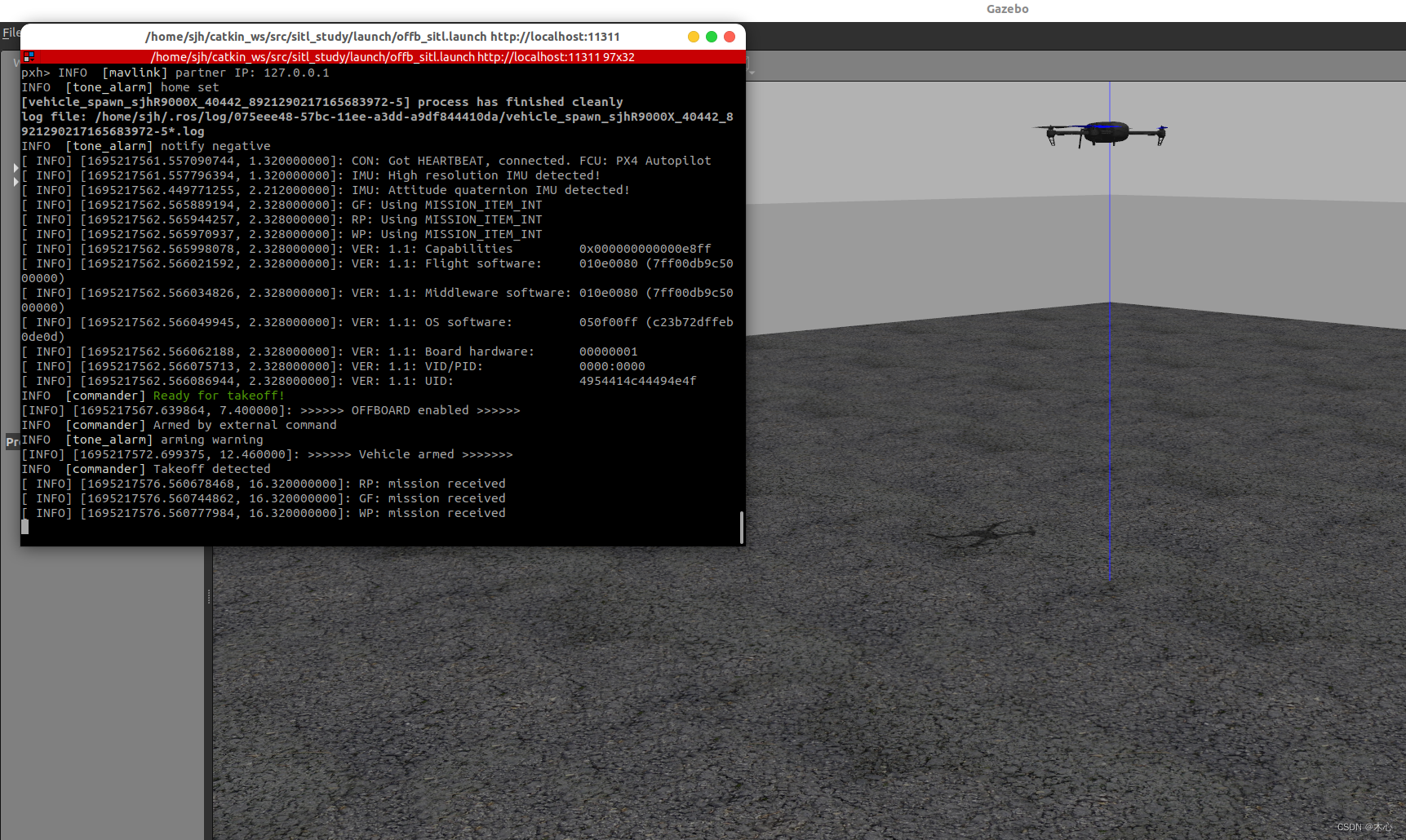
rosrun sitl_study offb_node.py
我们就能看到无人机先解锁然后转到OFFBORAD模式,然后起飞到两米,如下图所示
3. 编写launch文件
虽然上述的启动方式能够实现让飞机启动,但是需要我们手动输入两次命令,非常不优雅,我们可以编写一个launch文件来集成这两者。
roscd sitl_study
mkdir launch
cd launch
touch offb_start.launch
然后打开该文件,输入以下内容
<?xml version="1.0"?>
<launch>
<!-- Include the MAVROS node with SITL and Gazebo -->
<include file="$(find px4)/launch/mavros_posix_sitl.launch">
</include>
<!-- Our node to control the drone -->
<node pkg="sitl_study" type="offb_node.py" name="offb_node_py" required="true" output="screen" />
</launch>
然后再进行一次编译
cd ~/catkin_ws
catkin_make
source ./devel/setup.bash
我们就可以在任意路径下启动了
roslaunch sitl_study offb_start.launch
Reference
PX4官网的Offobrad模式介绍
PX4官网的控制例程