文章目录
- 一、PID算法
- 二、控制方法对比
- PID的手动整定
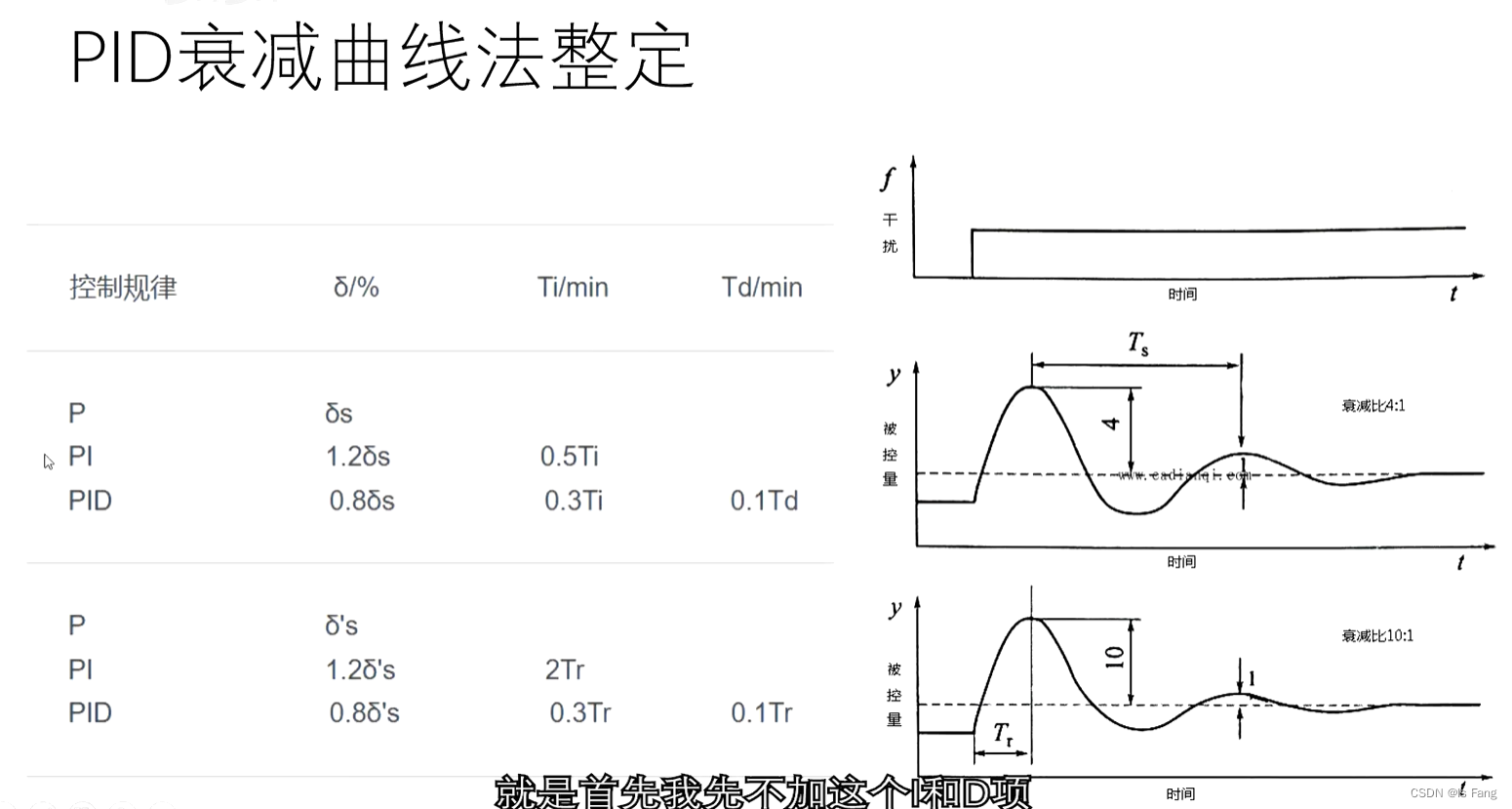
- PID衰减曲线整定
- PID调节器各校正环节的作用是:
- 计算注意事项
- PID算法的一般表达式是:
一、PID算法
PID控制是最早发展的自动控制策略之一,是微机化控制系统的一个重要组成部分,整个系统的控制功能主要由PID控制算法来实现。
PID控制系统由比例单元、积分单元、微分单元组成,根据偏差的比例(P)、积分(I)、微分(D)计算出系统所需控制量并进行控制,称为PID控制。实际经验和理论分析都表明,PID控制能够满足相当多工业对象的控制要求,至今仍是一种应用最为广泛的控制算法之一,实际中也有PI和PD控制。
二、控制方法对比
- 棒棒控制(启停控制器)
- 容易出现震荡
- 比例控制

- 缺点是无法接近平衡,有静态误差
- PI控制

- 优点是解决静态误差,但是达到平衡需要一段时间
- PID控制

- 此时的Ki = 1/Ti,口诀中的积分时间就是Ti
PID的手动整定

PID衰减曲线整定
PID调节器各校正环节的作用是:
-
(1)比例环节:即时成比例地反应控制系统的偏差信号e(t),偏差一旦产生,调节器立即产生控制作用以减少偏差。
- 过去
- 用平滑的调节取代暴力的开关
-
(2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数TI,TI越大,积分作用越弱,反之则越强。
- 现在
- 累积偏差
-
(3)微分环节:能反映偏差信号的变化趋势(变化速率),并能在偏差信号的值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。
- 未来
- 误差对时间取微分,抑制波动,快速达到平衡
计算注意事项
-
比例项输出=本次偏差乘以比例项系数
-
积分项输出=历史偏差之和乘以积分项系数
-
微分项输出=最近两次偏差之差(上次偏差-本次偏差)乘以微分项系数
-
PID输出为上述输出之和,也就是多少秒高电平
-
PID计算时间(采样周期)要大于PWM周期时间
PID算法的一般表达式是:

u(t)------输出量
Kp-------比例系数
e(t)------误差
Tt--------积分时间常数
TD-------微分时间常数


![[ 数据结构 -- 手撕排序算法第六篇 ] 快速排序(非递归版本)](https://img-blog.csdnimg.cn/81cee267ac5842bcaa4fbb293089d4e8.png)





![[附源码]计算机毕业设计Python高校商铺管理系统论文(程序+源码+LW文档)](https://img-blog.csdnimg.cn/1775b28cef8f4e96801aa314c9f592c7.png)