深度学习——所需知识二
文章目录
- 前言
- 一、微积分
- 1.1. 导数和微分
- 1.2. 偏导数
- 1.3. 梯度
- 1.4. 链式法则
- 二、自动微分
- 2.1. 简单例子
- 2.2. 非标量变量的反向传播
- 2.3. 分离计算
- 2.4. python控制流的梯度计算
- 三、概率
- 3.1. 基本概率论
- 3.1.1. 概率论公理
- 3.1.2. 随机变量
- 3.2. 处理多个随机变量
- 3.2.1.联合概率
- 3.2.2. 条件概率
- 3.2.3. 贝叶斯定理
- 3.2.4. 边际化
- 3.2.5. 独立性
- 3.3. 期望和方差
- 四、查阅文档
- 4.1. 查找模块中所有函数和类
- 4.2. 查找特定函数和类的用法
- 总结
前言
书接上章,本章将继续介绍一下学习深度学习前要掌握的知识:微积分、自动微分、概率。[d2l库是《动手学深度学习》这本书的配套代码库,它提供了一系列用于深度学习的实用工具和实现示例]
参考书:
《动手学深度学习》
一、微积分
微积分分为积分和微分,在微分学中最重要的应用是优化问题,即考虑如何把事情做到最好。
在深度学习中,我们“训练”模型,不断更新它们,使它们在看到越来越多的数据时变得越来越好。 通常情况下,变得更好意味着最小化一个损失函数(loss function)。
我们可以将拟合模型的任务分解为两个关键问题:
- 优化(optimization):用模型拟合观测数据的过程;
- 泛化(generalization):数学原理和实践者的智慧,能够指导我们生成出有效性超出用于训练的数据集本身的模型。
1.1. 导数和微分
导数的计算,这是几乎所有深度学习优化算法的关键步骤。 在深度学习中,我们通常选择对于模型参数可微的损失函数。
假设我们有一个函数f,其输入和输出都是标量。 如果f的导数存在,这个极限被定义为:
定义u=f(x)=3x²−4x如下,通过令x=1并让h接近0
def f(x):
return 3*x**2 - 4*x
def numerical_lim(f,x,h):
return (f(x+h) - f(x)) / h
h = 0.1
for i in range(5):
print(f"h={h:.5f},numerical limit = {numerical_lim(f,1,h):.5f}")
h *= 0.1
#结果:
h=0.10000,numerical limit = 2.30000
h=0.01000,numerical limit = 2.03000
h=0.00100,numerical limit = 2.00300
h=0.00010,numerical limit = 2.00030
h=0.00001,numerical limit = 2.00003
当x=1时,导数u′是2。其实导数可视为曲线 u = f ( x ) u=f(x) u=f(x)切线的斜率。
进行可视化:
import numpy as np
from matplotlib_inline import backend_inline
from d2l import torch as d2l
def f(x):
return 3 * x ** 2 - 4 * x
def use_svg_display(): # @save
"""使用svg格式在Jupyter中显示绘图"""
backend_inline.set_matplotlib_formats('svg')
def set_figsize(figsize=(3.5, 2.5)): # @save
"""设置matplotlib的图表大小"""
use_svg_display()
d2l.plt.rcParams['figure.figsize'] = figsize
# @save
def set_axes(axes, xlabel, ylabel, xlim, ylim, xscale, yscale, legend):
"""设置matplotlib的轴"""
axes.set_xlabel(xlabel)
axes.set_ylabel(ylabel)
axes.set_xscale(xscale)
axes.set_yscale(yscale)
axes.set_xlim(xlim)
axes.set_ylim(ylim)
if legend:
axes.legend(legend)
axes.grid()
# @save
def plot(X, Y=None, xlabel=None, ylabel=None, legend=None, xlim=None,
ylim=None, xscale='linear', yscale='linear',
fmts=('-', 'm--', 'g-.', 'r:'), figsize=(3.5, 2.5), axes=None):
"""绘制数据点"""
if legend is None:
legend = []
set_figsize(figsize)
axes = axes if axes else d2l.plt.gca()
# 如果X有一个轴,输出True
def has_one_axis(X):
return (hasattr(X, "ndim") and X.ndim == 1 or isinstance(X, list)
and not hasattr(X[0], "__len__"))
if has_one_axis(X):
X = [X]
if Y is None:
X, Y = [[]] * len(X), X
elif has_one_axis(Y):
Y = [Y]
if len(X) != len(Y):
X = X * len(Y)
axes.cla()
for x, y, fmt in zip(X, Y, fmts):
if len(x):
axes.plot(x, y, fmt)
else:
axes.plot(y, fmt)
set_axes(axes, xlabel, ylabel, xlim, ylim, xscale, yscale, legend)
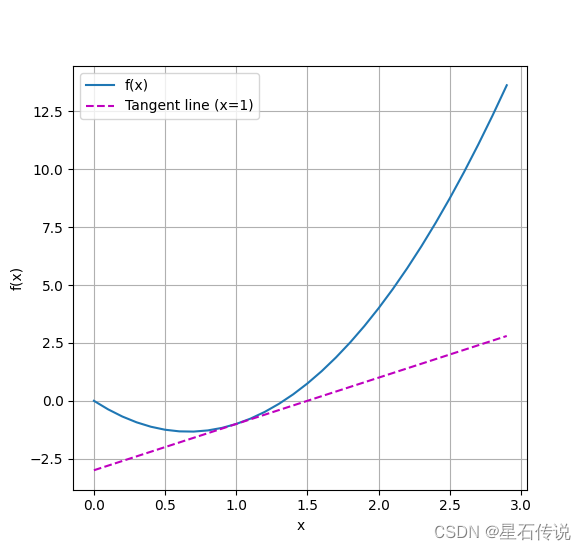
成功绘制函数 u = f ( x ) u=f(x) u=f(x)及其在 x = 1 x=1 x=1处的切线 y = 2 x − 3 y=2x-3 y=2x−3,其中系数 2 2 2是切线的斜率。
1.2. 偏导数
到目前为止,我们只讨论了仅含一个变量的函数的微分。
在深度学习中,函数通常依赖于许多变量。
因此,我们需要将微分的思想推广到多元函数
∂ y ∂ x i = lim h → 0 f ( x 1 , … , x i − 1 , x i + h , x i + 1 , … , x n ) − f ( x 1 , … , x i , … , x n ) h . \frac{\partial y}{\partial x_i} = \lim_{h \rightarrow 0} \frac{f(x_1, \ldots, x_{i-1}, x_i+h, x_{i+1}, \ldots, x_n) - f(x_1, \ldots, x_i, \ldots, x_n)}{h}. ∂xi∂y=h→0limhf(x1,…,xi−1,xi+h,xi+1,…,xn)−f(x1,…,xi,…,xn).
为了计算
∂
y
∂
x
i
\frac{\partial y}{\partial x_i}
∂xi∂y,
我们可以简单地将
x
1
,
…
,
x
i
−
1
,
x
i
+
1
,
…
,
x
n
x_1, \ldots, x_{i-1}, x_{i+1}, \ldots, x_n
x1,…,xi−1,xi+1,…,xn看作常数,
并计算
y
y
y关于
x
i
x_i
xi的导数
1.3. 梯度
我们可以连结一个多元函数对其所有变量的偏导数,以得到该函数的梯度(gradient)向量。函数 f ( x ) f(\mathbf{x}) f(x)相对于 x \mathbf{x} x的梯度是一个包含 n n n个偏导数的向量:
∇ x f ( x ) = [ ∂ f ( x ) ∂ x 1 , ∂ f ( x ) ∂ x 2 , … , ∂ f ( x ) ∂ x n ] ⊤ , \nabla_{\mathbf{x}} f(\mathbf{x}) = \bigg[\frac{\partial f(\mathbf{x})}{\partial x_1}, \frac{\partial f(\mathbf{x})}{\partial x_2}, \ldots, \frac{\partial f(\mathbf{x})}{\partial x_n}\bigg]^\top, ∇xf(x)=[∂x1∂f(x),∂x2∂f(x),…,∂xn∂f(x)]⊤,
1.4. 链式法则
然而,上面方法可能很难找到梯度。
这是因为在深度学习中,多元函数通常是复合(composite)的,
所以难以应用上述任何规则来微分这些函数。
幸运的是,链式法则可以被用来微分复合函数。
假设可微分函数
y
y
y有变量
u
1
,
u
2
,
…
,
u
m
u_1, u_2, \ldots, u_m
u1,u2,…,um,其中每个可微分函数
u
i
u_i
ui都有变量
x
1
,
x
2
,
…
,
x
n
x_1, x_2, \ldots, x_n
x1,x2,…,xn。
注意,
y
y
y是
x
1
,
x
2
,
…
,
x
n
x_1, x_2, \ldots, x_n
x1,x2,…,xn的函数。
对于任意
i
=
1
,
2
,
…
,
n
i = 1, 2, \ldots, n
i=1,2,…,n,链式法则给出:
∂ y ∂ x i = ∂ y ∂ u 1 ∂ u 1 ∂ x i + ∂ y ∂ u 2 ∂ u 2 ∂ x i + ⋯ + ∂ y ∂ u m ∂ u m ∂ x i \frac{\partial y}{\partial x_i} = \frac{\partial y}{\partial u_1} \frac{\partial u_1}{\partial x_i} + \frac{\partial y}{\partial u_2} \frac{\partial u_2}{\partial x_i} + \cdots + \frac{\partial y}{\partial u_m} \frac{\partial u_m}{\partial x_i} ∂xi∂y=∂u1∂y∂xi∂u1+∂u2∂y∂xi∂u2+⋯+∂um∂y∂xi∂um
二、自动微分
深度学习框架通过自动计算导数,即自动微分(automatic differentiation)来加快求导。
2.1. 简单例子
假设我们想对函数 y = 2 x T x y = 2x^{T}x y=2xTx关于列向量x求导
#1.2.偏导数
import torch
x = torch.arange(4.0)
print(x)
x.requires_grad_(True) # 等价于x=torch.arange(4.0,requires_grad=True)
print(x.grad) #默认值是None
y = 2 * torch.dot(x,x)
#通过调用反向传播函数来自动计算`y`关于`x`每个分量的梯度
y.backward()
print(x.grad)
print(x.grad == 4*x)
# 在默认情况下,PyTorch会累积梯度,我们需要清除之前的值(计算x的另一个函数)
x.grad.zero_()
y = x.sum()
y.backward()
print(x.grad)
#结果:
tensor([0., 1., 2., 3.])
None
tensor([ 0., 4., 8., 12.])
tensor([True, True, True, True])
tensor([1., 1., 1., 1.])
2.2. 非标量变量的反向传播
当y不是标量时,向量y关于向量x的导数的最自然解释是一个矩阵。
对于高阶和高维的y和x,求导的结果可以是一个高阶张量。
# 对非标量调用backward需要传入一个gradient参数,该参数指定微分函数关于self的梯度。
# 本例只想求偏导数的和,所以传递一个1的梯度是合适的
x.grad.zero_()
print(x)
y = x * x
# 等价于y.backward(torch.ones(len(x)))
y.sum().backward()
print(x.grad)
#结果:
tensor([0., 1., 2., 3.], requires_grad=True)
tensor([0., 2., 4., 6.])
2.3. 分离计算
有时,我们希望将某些计算移动到记录的计算图之外
下面的反向传播函数计算z=ux关于x的偏导数,同时将u作为常数处理, 而不是z=xx*x关于x的偏导数。
#分离计算
x.grad.zero_()
y = x * x
u = y.detach()
z = u * x
z.sum().backward()
print(x.grad)
print(x.grad == u)
x.grad.zero_()
y.sum().backward()
print(x.grad == 2 * x)
#结果:
tensor([0., 1., 4., 9.])
tensor([True, True, True, True])
tensor([True, True, True, True])
2.4. python控制流的梯度计算
即使构建函数的计算图需要通过Python控制流(例如,条件、循环或任意函数调用),我们仍然可以计算得到的变量的梯度
#python控制流的梯度计算
def f(a):
b = a * 2
while b.norm() < 1000:
b = b * 2
if b.sum() > 0:
c = b
else:
c = 100 * b
return c
a = torch.randn(size=(), requires_grad=True)
d = f(a)
d.backward()
print(a.grad == d / a)
#结果:
tensor(True)
我们现在可以分析上面定义的f函数。 请注意,它在其输入a中是分段线性的。 换言之,对于任何a,存在某个常量标量k,使得f(a)=k*a,其中k的值取决于输入a,因此可以用d/a验证梯度是否正确。
三、概率
简单地说,机器学习就是做出预测。
3.1. 基本概率论
假设我们掷骰子,想知道看到1的几率有多大。
如果骰子是公平的,那么所有六个结果 { 1 , … , 6 } \{1, \ldots, 6\} {1,…,6}都有相同的可能发生,因此我们可以说 1 1 1发生的概率为 1 6 \frac{1}{6} 61。
大数定律 告诉我们:随着投掷次数的增加,这个估计值会越来越接近真实的潜在概率。
#概率:
import torch
from torch.distributions import multinomial
from d2l import torch as d2l
fair_probs = torch.ones([6]) / 6
print(fair_probs)
#出现次数
print(multinomial.Multinomial(1, fair_probs).sample())
print(multinomial.Multinomial(10, fair_probs).sample())
# 将结果存储为32位浮点数以进行除法
counts = multinomial.Multinomial(2000, fair_probs).sample()
print(counts / 2000) # 相对频率作为估计值
#结果:
tensor([0.1667, 0.1667, 0.1667, 0.1667, 0.1667, 0.1667])
tensor([1., 0., 0., 0., 0., 0.])
tensor([1., 1., 2., 2., 2., 2.])
tensor([0.1745, 0.1620, 0.1630, 0.1675, 0.1650, 0.1680])
因为我们是从一个公平的骰子中生成的数据,我们知道每个结果都有真实的概率 1 6 \frac{1}{6} 61,大约是 0.167 0.167 0.167,所以上面输出的估计值看起来不错。
我们也可以看到这些概率如何随着时间的推移收敛到真实概率。
让我们进行500组实验,每组抽取10个样本:
counts = multinomial.Multinomial(10, fair_probs).sample((500,))
cum_counts = counts.cumsum(dim=0)
estimates = cum_counts / cum_counts.sum(dim=1, keepdims=True)
d2l.set_figsize((6, 4.5))
for i in range(6):
d2l.plt.plot(estimates[:, i].numpy(),
label=("P(die=" + str(i + 1) + ")"))
d2l.plt.axhline(y=0.167, color='black', linestyle='dashed')
d2l.plt.gca().set_xlabel('Groups of experiments')
d2l.plt.gca().set_ylabel('Estimated probability')
d2l.plt.legend()
d2l.plt.show()
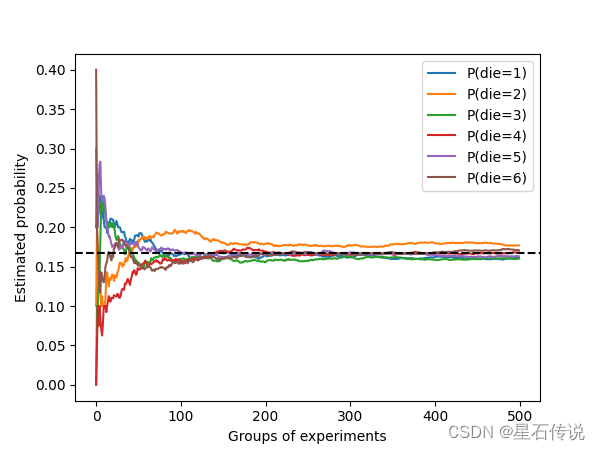
每条实线对应于骰子的6个值中的一个,并给出骰子在每组实验后出现值的估计概率。
当我们通过更多的实验获得更多的数据时,这
6
6
6条实体曲线向真实概率收敛。
3.1.1. 概率论公理
在处理骰子掷出时,我们将集合 S = { 1 , 2 , 3 , 4 , 5 , 6 } \mathcal{S} = \{1, 2, 3, 4, 5, 6\} S={1,2,3,4,5,6}
称为样本空间(sample space)或结果空间(outcome space),
其中每个元素都是结果(outcome)。
事件(event)是一组给定样本空间的随机结果。
概率(probability)可以被认为是将集合映射到真实值的函数。在给定的样本空间 S \mathcal{S} S中,事件 A \mathcal{A} A的概率,表示为 P ( A ) P(\mathcal{A}) P(A)
3.1.2. 随机变量
在我们掷骰子的随机实验中,我们引入了随机变量(random variable)的概念。随机变量几乎可以是任何数量,并且它可以在随机实验的一组可能性中取一个值。
离散(discrete)随机变量(如骰子的每一面)
和连续(continuous)随机变量(如人的体重和身高)之间存在区别。
3.2. 处理多个随机变量
很多时候,我们会考虑多个随机变量。例如:
图像包含数百万像素,因此有数百万个随机变量。
在许多情况下,图像会附带一个标签(label),标识图像中的对象。
我们也可以将标签视为一个随机变量。
我们甚至可以将所有元数据视为随机变量,例如位置、时间、光圈、焦距、ISO、对焦距离和相机类型。
所有这些都是联合发生的随机变量。
当我们处理多个随机变量时,会有若干个变量是我们感兴趣的。
3.2.1.联合概率
第一个被称为联合概率(joint probability)
P
(
A
=
a
,
B
=
b
)
P(A=a,B=b)
P(A=a,B=b)。
给定任意值
a
a
a和
b
b
b,联合概率可以回答:
A
=
a
A=a
A=a和
B
=
b
B=b
B=b同时满足的概率是多少?
请注意,对于任何
a
a
a和
b
b
b的取值,
P
(
A
=
a
,
B
=
b
)
≤
P
(
A
=
a
)
P(A = a, B=b) \leq P(A=a)
P(A=a,B=b)≤P(A=a)。
3.2.2. 条件概率
联合概率的不等式带给我们一个有趣的比率:
0
≤
P
(
A
=
a
,
B
=
b
)
P
(
A
=
a
)
≤
1
0 \leq \frac{P(A=a, B=b)}{P(A=a)} \leq 1
0≤P(A=a)P(A=a,B=b)≤1。
我们称这个比率为条件概率(conditional probability),
并用
P
(
B
=
b
∣
A
=
a
)
P(B=b \mid A=a)
P(B=b∣A=a)表示它:它是
B
=
b
B=b
B=b的概率,前提是
A
=
a
A=a
A=a已发生。
3.2.3. 贝叶斯定理
基于条件概率的定义
根据乘法法则可得到
P
(
A
,
B
)
=
P
(
B
∣
A
)
P
(
A
)
P(A, B) = P(B \mid A) P(A)
P(A,B)=P(B∣A)P(A)。
根据对称性,可得到
P
(
A
,
B
)
=
P
(
A
∣
B
)
P
(
B
)
P(A, B) = P(A \mid B) P(B)
P(A,B)=P(A∣B)P(B)。
假设
P
(
B
)
>
0
P(B)>0
P(B)>0,求解其中一个条件变量,我们得到
P ( A ∣ B ) = P ( B ∣ A ) P ( A ) P ( B ) . P(A \mid B) = \frac{P(B \mid A) P(A)}{P(B)}. P(A∣B)=P(B)P(B∣A)P(A).
请注意,这里我们使用紧凑的表示法:
其中
P
(
A
,
B
)
P(A, B)
P(A,B)是一个联合分布(joint distribution),
P
(
A
∣
B
)
P(A \mid B)
P(A∣B)是一个条件分布(conditional distribution)。
这种分布可以在给定值
A
=
a
,
B
=
b
A = a, B=b
A=a,B=b上进行求值。
3.2.4. 边际化
为了能进行事件概率求和,我们需要求和法则
即
B
B
B的概率相当于计算
A
A
A的所有可能选择,并将所有选择的联合概率聚合在一起:
P ( B ) = ∑ A P ( A , B ) , P(B) = \sum_{A} P(A, B), P(B)=A∑P(A,B),
这也称为边际化(marginalization)。
边际化结果的概率或分布称为边际概率(marginal probability)
或边际分布(marginal distribution)。
3.2.5. 独立性
如果两个随机变量
A
A
A和
B
B
B是独立的,意味着事件
A
A
A的发生跟
B
B
B事件的发生无关。
在这种情况下,统计学家通常将这一点表述为
A
⊥
B
A \perp B
A⊥B。
根据贝叶斯定理,马上就能同样得到
P
(
A
∣
B
)
=
P
(
A
)
P(A \mid B) = P(A)
P(A∣B)=P(A)。
在所有其他情况下,我们称
A
A
A和
B
B
B依赖。
由于
P
(
A
∣
B
)
=
P
(
A
,
B
)
P
(
B
)
=
P
(
A
)
P(A \mid B) = \frac{P(A, B)}{P(B)} = P(A)
P(A∣B)=P(B)P(A,B)=P(A)等价于
P
(
A
,
B
)
=
P
(
A
)
P
(
B
)
P(A, B) = P(A)P(B)
P(A,B)=P(A)P(B),
因此两个随机变量是独立的,当且仅当两个随机变量的联合分布是其各自分布的乘积。
同样地,给定另一个随机变量
C
C
C时,两个随机变量
A
A
A和
B
B
B是条件独立的
当且仅当
P
(
A
,
B
∣
C
)
=
P
(
A
∣
C
)
P
(
B
∣
C
)
P(A, B \mid C) = P(A \mid C)P(B \mid C)
P(A,B∣C)=P(A∣C)P(B∣C)。
这个情况表示为
A
⊥
B
∣
C
A \perp B \mid C
A⊥B∣C。
3.3. 期望和方差
为了概括概率分布的关键特征,我们需要一些测量方法。
一个随机变量 X X X的期望(expectation,或平均值(average))表示为
E [ X ] = ∑ x x P ( X = x ) . E[X] = \sum_{x} x P(X = x). E[X]=x∑xP(X=x).
在许多情况下,我们希望衡量随机变量 X X X与其期望值的偏置。这可以通过方差来量化
V a r [ X ] = E [ ( X − E [ X ] ) 2 ] = E [ X 2 ] − E [ X ] 2 . \mathrm{Var}[X] = E\left[(X - E[X])^2\right] = E[X^2] - E[X]^2. Var[X]=E[(X−E[X])2]=E[X2]−E[X]2.
随机变量函数的方差衡量的是:当从该随机变量分布中采样不同值
x
x
x时,
函数值偏离该函数的期望的程度:
V a r [ f ( x ) ] = E [ ( f ( x ) − E [ f ( x ) ] ) 2 ] . \mathrm{Var}[f(x)] = E\left[\left(f(x) - E[f(x)]\right)^2\right]. Var[f(x)]=E[(f(x)−E[f(x)])2].
四、查阅文档
4.1. 查找模块中所有函数和类
为了知道模块中可以调用哪些函数和类,可以调用dir函数
import torch
print(dir(torch))
4.2. 查找特定函数和类的用法
有关如何使用给定函数或类的更具体说明,可以调用help函数查看
print(help(torch.zeros_like))
总结
本章详细介绍了学习深度学习前要掌握的知识:微积分、自动微分、概率。接下来将正式开始深度学习的学习,下一章将是有关线性神经网络的讲解。
夫唯不居,是以不去。
–2023-9-17 进阶篇