1. 设置环境变量
编译gpgpu-sim 需要先运行脚本 setup_environment , source setup_environment, 注释如下,主要是设置一些 Makefile中会用到的环境变量
# see README before running this
# 下面这句用来检测当前的shell环境是不是 bash 或者 sh 或者 zsh,不支持除三者之外的其他 shell
ps -p $$ | awk '/bash/ || / sh/ || /zsh/ {exit 1;}' && echo "ERROR ** source setup_environment must be run in a bash, zsh or sh shell; see README" && exit
# 下面这变量用来标识 成功运行过了 source setup_environment,并在本脚本末尾将这个变量置 1;
export GPGPUSIM_SETUP_ENVIRONMENT_WAS_RUN=
# 下面,将本脚本所在的路径赋值给 GPGPUSIM_ROOT
export GPGPUSIM_ROOT="$( cd "$( dirname "$BASH_SOURCE" )" && pwd )"
# 下面,通过源代码根目录下的 version 文件中的内容,获得gpgp-sim的版本号,存储于 GPGPUSIM_VERSION_STRING;而变量 GPGPUSIM_BUILD_STRING 将根据 version 的文件内容而获得空值;
GPGPUSIM_VERSION_STRING=`cat $GPGPUSIM_ROOT/version | awk '/Version/ {print $8}'`
GPGPUSIM_BUILD_STRING=`cat $GPGPUSIM_ROOT/version | awk '/Change/ {print $6}'`
# 下面,将在终端中输出这两个变量的值,作为提示信息;
echo -n "GPGPU-Sim version $GPGPUSIM_VERSION_STRING (build $GPGPUSIM_BUILD_STRING) ";
# 下面,错误检查;判断 CUDA_INSTALL_PATH 是否为空;这是一个需要根据本机的 cuda 环境信息预先设置的变量,一般是 export CUDA_INSTALL_PATH=/usr/local/cuda
if [ ! -n "$CUDA_INSTALL_PATH" ]; then
echo "ERROR ** Install CUDA Toolkit and set CUDA_INSTALL_PATH.";
return;
fi
# 下面,错误检查;判断 CUDA_INSTALL_PATH 所表示的文件夹在系统中是否确实存在
if [ ! -d "$CUDA_INSTALL_PATH" ]; then
echo "ERROR ** CUDA_INSTALL_PATH=$CUDA_INSTALL_PATH invalid (directory does not exist)";
return;
fi
# 下面,错误检查;gpgpu-sim 仅支持 Linux 和 Mac OS 系统, 如果不是在这两种 OS 运行此脚本则退出;意味着 GPGPUSIM_SETUP_ENVIRONMENT_WAS_RUN 将不会被置1;
if [ ! `uname` = "Linux" -a ! `uname` = "Darwin" ]; then
echo "ERROR ** Unsupported platform: GPGPU-Sim $GPGPUSIM_VERSION_STRING developed and tested on Linux."
return;
fi
# 下面,去掉PATH中 跟cuda 和 gpgp-sim 相关的路径;防止多次运行本脚本时,会使得PATH内容不断重复变长,影响性能,挑战极限;
export PATH=`echo $PATH | sed "s#$GPGPUSIM_ROOT/bin:$CUDA_INSTALL_PATH/bin:##"`
# 下面,在PATH中加入跟cuda 和 gpgpu-sim相关的路径;
export PATH=$GPGPUSIM_ROOT/bin:$CUDA_INSTALL_PATH/bin:$PATH
# to run the debug build of GPGPU-Sim run:
# source setup_environment debug
# 下面,设置 NVCC_PATH 为 nvcc 的全路径,例如常常是 /usr/local/cuda/bin/nvcc
NVCC_PATH=`which nvcc`;
# 下面,错误检查;如果PATH所记录的路径下找不到nvcc这个程序,那么系统将返回非0值,可用echo $? 查看具体数值;
if [ $? = 1 ]; then
echo "";
echo "ERROR ** nvcc (from CUDA Toolkit) was not found in PATH but required to build GPGPU-Sim.";
echo " Try adding $CUDA_INSTALL_PATH/bin/ to your PATH environment variable.";
echo " Please also be sure to read the README file if you have not done so.";
echo "";
return;
fi
# 下面,从gcc --version 返回的文本的第一行中,抓出当前 gcc 的版本号
CC_VERSION=`gcc --version | head -1 | awk '{for(i=1;i<=NF;i++){ if(match($i,/^[0-9]\.[0-9]\.[0-9]$/)) {print $i; exit 0}}}'`
# 下面,跟上一个类似,从nvcc --version 的返回文本中获得 nvcc 的版本号, 这个docker image 中分别是 4.0 和 4000
CUDA_VERSION_STRING=`$CUDA_INSTALL_PATH/bin/nvcc --version | awk '/release/ {print $5;}' | sed 's/,//'`;
CUDA_VERSION_NUMBER=`echo $CUDA_VERSION_STRING | sed 's/\./ /' | awk '{printf("%02u%02u", 10*int($1), 10*$2);}'`
# 下面,版本号检查,2030 ~ 4020 之间
if [ $CUDA_VERSION_NUMBER -gt 4020 -o $CUDA_VERSION_NUMBER -lt 2030 ]; then
echo "ERROR ** GPGPU-Sim version $GPGPUSIM_VERSION_STRING not tested with CUDA version $CUDA_VERSION_STRING (please see README)";
return;
fi
# 下面,没有参数,故$#==0;所以 GPGPUSIM_CONFIG=gcc-4.4.7/cuda-4000/release; $1= debug, release
if [ $# = '1' ] ;
then
export GPGPUSIM_CONFIG=gcc-$CC_VERSION/cuda-$CUDA_VERSION_NUMBER/$1
else
export GPGPUSIM_CONFIG=gcc-$CC_VERSION/cuda-$CUDA_VERSION_NUMBER/release
fi
# 下面,这个变量没用
export QTINC=/usr/include
# 下面,试图设置 libOpenCL.so 和 cl.h 文件所在的路径,存储于变量 NVOPENCL_LIBDIR 和 NVOPENCL_INCDIR 中;
# change NVOPENCL_LIBDIR to point to your opencl library directory, usually
# /usr/lib or /usr/lib64. Not setting this variable will cause gpgpu-sim to
# build without opencl support.
if [ -f /usr/lib64/libOpenCL.so ]; then
export NVOPENCL_LIBDIR=/usr/lib64;
# change NVOPENCL_INCDIR to point to your opencl include directory.
if [ -f /usr/include/CL/cl.h ]; then
export NVOPENCL_INCDIR=/usr/include/;
elif [ -f $CUDA_INSTALL_PATH/include/CL/cl.h ]; then
export NVOPENCL_INCDIR=$CUDA_INSTALL_PATH/include/;
fi
fi
# 下面,设置 LD_LIBRARY_PATH 的值,通过LD_LIBRARY_PATH修改依赖的动态库,会话全局有效;防止多次运行 本脚本,故先尝试删掉;但这里的方式是无效的,多次运行会导致变量值越来越长;
# setting LD_LIBRARY_PATH as follows enables GPGPU-Sim to be invoked by
# native CUDA and OpenCL applications. GPGPU-Sim is dynamically linked
# against instead of the CUDA toolkit. This replaces this cumbersome
# static link setup in prior GPGPU-Sim releases.
if [ `uname` = "Darwin" ]; then
export DYLD_LIBRARY_PATH=`echo $DYLD_LIBRARY_PATH | sed -Ee 's#'$GPGPUSIM_ROOT'\/lib\/[0-9]+\/(debug|release):##'`
export DYLD_LIBRARY_PATH=$GPGPUSIM_ROOT/lib/$GPGPUSIM_CONFIG:$DYLD_LIBRARY_PATH
else
export LD_LIBRARY_PATH=`echo $LD_LIBRARY_PATH | sed -re 's#'$GPGPUSIM_ROOT'\/lib\/[0-9]+\/(debug|release):##'`
export LD_LIBRARY_PATH=$GPGPUSIM_ROOT/lib/$GPGPUSIM_CONFIG:$LD_LIBRARY_PATH
fi
# 下面,OpenCL 先不管,远程调用NV 的 OpenCL 环境
# The following sets OPENCL_REMOTE_GPU_HOST which is used by GPGPU-Sim to
# SSH to remote node to generate PTX for OpenCL kernels when running on
# a node that does not have an NVIDIA driver installed.
# The remote node should have GPGPU-Sim installed at the same path
if [ `uname` = "Darwin" ]; then
HOSTNAME_PREFIX=`hostname -s`;
export HOSTNAME_DOMAIN=`hostname | sed s/$HOSTNAME_PREFIX\.//`;
else
HOSTNAME_DOMAIN=`hostname -d`
fi
if [ "x$HOSTNAME_DOMAIN" = "xece.ubc.ca" -a "$OPENCL_REMOTE_GPU_HOST" = "" ]; then
export OPENCL_REMOTE_GPU_HOST=aamodt-pc05.ece.ubc.ca
fi
HOSTNAME_F=`hostname -f`
if [ "x$HOSTNAME_F" = "x$OPENCL_REMOTE_GPU_HOST" ]; then
unset OPENCL_REMOTE_GPU_HOST
fi
# 下面,如果发现文件 gpgpu_sim.verify 存在,则证明 gpuwattch 文件夹存在,则指定 GPGPUSIM_POWER_MODEL 的值;后面两个 elif 是错误检查;
# The following checks to see if the GPGPU-Sim power model is enabled.
# GPGPUSIM_POWER_MODEL points to the directory where gpgpusim_mcpat is located.
# If this is not set, it checks the default directory "$GPGPUSIM_ROOT/src/gpuwattch/".
if [ -d $GPGPUSIM_ROOT/src/gpuwattch/ ]; then
if [ ! -f $GPGPUSIM_ROOT/src/gpuwattch/gpgpu_sim.verify ]; then
echo "ERROR ** gpgpu_sim.verify not found in $GPGPUSIM_ROOT/src/gpuwattch";
return;
fi
export GPGPUSIM_POWER_MODEL=$GPGPUSIM_ROOT/src/gpuwattch/;
echo "configured with GPUWattch.";
elif [ -n "$GPGPUSIM_POWER_MODEL" ]; then
if [ ! -f $GPGPUSIM_POWER_MODEL/gpgpu_sim.verify ]; then
echo "";
echo "ERROR ** gpgpu_sim.verify not found in $GPGPUSIM_ROOT/src/gpuwattch/ - Either incorrect directory or incorrect McPAT version";
return;
fi
echo "configure with power model in $GPGPUSIM_POWER_MODEL.";
elif [ ! -d $GPGPUSIM_POWER_MODEL ]; then
echo "";
echo "ERROR ** GPGPUSIM_POWER_MODEL ($GPGPUSIM_POWER_MODEL) does not exist... Please set this to the gpgpusim_mcpat directory or unset this environment variable.";
return;
else
echo "configured without a power model.";
fi
echo "setup_environment succeeded";
# 下面,变量置1, 向 Makefile 说明成功运行过了 setup_environment 脚本
export GPGPUSIM_SETUP_ENVIRONMENT_WAS_RUN=1
2. 一览
示例程序 RAY 运行时 调用了 gpgpu-sim 的什么内容
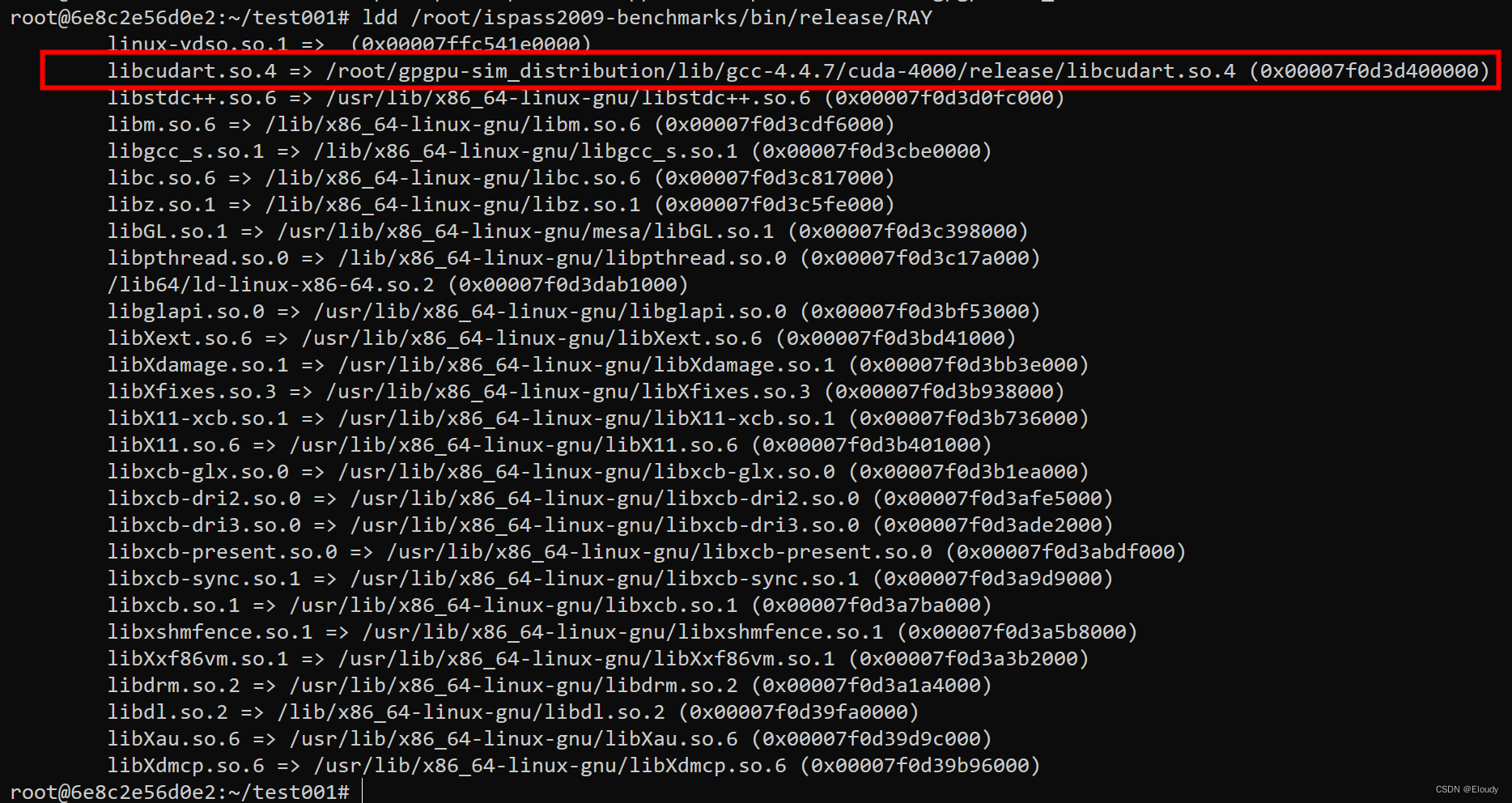
01记中,在容器中运行了 示例程序 RAY,现在在容器中查看其依赖:
# ldd /root/ispass2009-benchmarks/bin/release/RAY可以发现,与gpgpu-sim 相关的是 libcudart.so.4 存储在:
/root/gpgpu-sim_distribution/lib/gcc-4.4.7/cuda-4000/release/libcudart.so.4
3. gpgpu-sim 的 Makefile
3.1 顶层 Makefile 注释如下
/root/gpgpu-sim_distribution/Makefile
非常短,总共200多行
# Copyright (c) 2009-2011, Tor M. Aamodt, Ali Bakhoda, Timothy Rogers,
# Jimmy Kwa, and The University of British Columbia
# All rights reserved.
#
# Redistribution and use in source and binary forms, with or without
# modification, are permitted provided that the following conditions are met:
#
# Redistributions of source code must retain the above copyright notice, this
# list of conditions and the following disclaimer.
# Redistributions in binary form must reproduce the above copyright notice, this
# list of conditions and the following disclaimer in the documentation and/or
# other materials provided with the distribution.
# Neither the name of The University of British Columbia nor the names of its
# contributors may be used to endorse or promote products derived from this
# software without specific prior written permission.
#
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND
# ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED
# WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
# DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE
# FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
# DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
# SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
# CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
# OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
# OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
# comment out next line to disable OpenGL support
# export OPENGL_SUPPORT=1
#下面,如果变量之前没有赋值的话,在这里赋值为 intersim2
# (Temp) Using intersim2 by deafult, to use intersim, type make INTERSIM=intersim
INTERSIM ?= intersim2
#下面,定义了 6 个变量, cuda 版本,gpgpu-sim 版本,gcc 版本, g++ 版本,以及存放中间文件的 build 路径
include version_detection.mk
#下面,判断 gpgpu-sim 构建类型为 debug 还是 release,并决定是否在 CXXFLAG 中使用 -g 还是 -O3
ifeq ($(GPGPUSIM_CONFIG), gcc-$(CC_VERSION)/cuda-$(CUDART_VERSION)/debug)
export DEBUG=1
else
export DEBUG=0
endif
#下面,设置 BUILD_ROOT 的值为 Makefile 所在的路径
BUILD_ROOT?=$(shell pwd)
#下面,会导致编译子模块的时候,在编译器的类似 CXXFLAG 中定义一个宏,作为 cpp 代码的开关
export TRACE?=1
#下面,又又设置一遍 NVCC_PATH
NVCC_PATH=$(shell which nvcc)
#下面,设置两个文件夹的路径的变量,分别保存中间文件,和结果文件 libcudart.so
ifneq ($(shell which nvcc), "")
ifeq ($(DEBUG), 1)
export SIM_LIB_DIR=lib/gcc-$(CC_VERSION)/cuda-$(CUDART_VERSION)/debug
export SIM_OBJ_FILES_DIR=$(BUILD_ROOT)/build/gcc-$(CC_VERSION)/cuda-$(CUDART_VERSION)/debug
else
export SIM_LIB_DIR=lib/gcc-$(CC_VERSION)/cuda-$(CUDART_VERSION)/release
export SIM_OBJ_FILES_DIR=$(BUILD_ROOT)/build/gcc-$(CC_VERSION)/cuda-$(CUDART_VERSION)/release
endif
endif
#下面,定义变量 LIBS,包括 4 个库文件
# cuda-sim 跟 ptx 相关的cuda 源码解析器?
# gpgpu-sim_uarch 关联到要建立 gpgpu-sim 仿真器核心lib的文件夹
LIBS = cuda-sim gpgpu-sim_uarch $(INTERSIM) gpgpusimlib
#下面,TARGETS 的内容是本顶层 Makefile 的终极目标的依赖,所以,会被构建系统首先构建;
# TARGETS 包含了 libcudart.so, libOpenCL.so, cuobjdump_to_ptxplus
TARGETS =
ifeq ($(shell uname),Linux)
TARGETS += $(SIM_LIB_DIR)/libcudart.so
else # MAC
TARGETS += $(SIM_LIB_DIR)/libcudart.dylib
endif
#下面,向 TARGETS 中添加依赖
ifeq ($(NVOPENCL_LIBDIR),)
TARGETS += no_opencl_support
else ifeq ($(NVOPENCL_INCDIR),)
TARGETS += no_opencl_support
else
TARGETS += $(SIM_LIB_DIR)/libOpenCL.so
endif
TARGETS += cuobjdump_to_ptxplus/cuobjdump_to_ptxplus
#下面,其实是 gpuwattch 的构建中间文件目录,会构建出 app mcpat:/root/gpgpu-sim_distribution/build/gcc-4.4.7/cuda-4000/release/gpuwattch/mcpat
MCPAT=
MCPAT_OBJ_DIR=
MCPAT_DBG_FLAG=
ifneq ($(GPGPUSIM_POWER_MODEL),)
LIBS += mcpat
ifeq ($(DEBUG), 1)
MCPAT_DBG_FLAG = dbg
endif
MCPAT_OBJ_DIR = $(SIM_OBJ_FILES_DIR)/gpuwattch
MCPAT = $(MCPAT_OBJ_DIR)/*.o
endif
#下面,gpgpusim 是这个Makefile的终极目标,它有4个依赖 check_setup_environment check_power makedirs $(TARGETS)
.PHONY: check_setup_environment check_power
gpgpusim: check_setup_environment check_power makedirs $(TARGETS)
# 下面,设置了 NVCC_PATH=/usr/local/cuda/bin/nvcc
# 检查三个环境变量是否非空,任意一个为空,则退出构建;若皆不为空,则说明 前面运行 source setup_environment 是成功的;
# 接下来会设置 NVCC_PATH, 是 nvcc 编译器程序的绝对地址(其实之前设置过了);若设置成功就打印输出一句话:Building GPGPU-Sim version 3.2.2 (build ) with CUDA version 4.0
check_setup_environment:
@if [ ! -n "$(GPGPUSIM_ROOT)" -o ! -n "$(CUDA_INSTALL_PATH)" -o ! -n "$(GPGPUSIM_SETUP_ENVIRONMENT_WAS_RUN)" ]; then \
echo "ERROR *** run 'source setup_environment' before 'make'; please see README."; \
exit 101; \
else \
NVCC_PATH=`which nvcc`; \
if [ $$? = 1 ]; then \
echo ""; \
echo "ERROR ** nvcc (from CUDA Toolkit) was not found in PATH but required to build GPGPU-Sim."; \
echo " Try adding $(CUDA_INSTALL_PATH)/bin/ to your PATH environment variable."; \
echo " Please also be sure to read the README file if you have not done so."; \
echo ""; \
exit 102; \
else \
echo; echo " Building GPGPU-Sim version $(GPGPUSIM_VERSION) (build $(GPGPUSIM_BUILD)) with CUDA version $(CUDA_VERSION_STRING)"; echo; \
true; \
fi \
fi
#下面,检查 gpuwattch 的相关变量 GPGPUSIM_POWER_MODEL 是否设置成功;
check_power:
@if [ -d "$(GPGPUSIM_ROOT)/src/gpuwattch/" -a ! -n "$(GPGPUSIM_POWER_MODEL)" ]; then \
echo ""; \
echo " Power model detected in default directory ($(GPGPUSIM_ROOT)/src/gpuwattch) but GPGPUSIM_POWER_MODEL not set."; \
echo " Please re-run setup_environment or manually set GPGPUSIM_POWER_MODEL to the gpuwattch directory if you would like to include the GPGPU-Sim Power Model."; \
echo ""; \
true; \
elif [ ! -d "$(GPGPUSIM_POWER_MODEL)" ]; then \
echo ""; \
echo "ERROR ** Power model directory invalid."; \
echo "($(GPGPUSIM_POWER_MODEL)) is not a valid directory."; \
echo "Please set GPGPUSIM_POWER_MODEL to the GPGPU-Sim gpuwattch directory."; \
echo ""; \
exit 101; \
elif [ -n "$(GPGPUSIM_POWER_MODEL)" -a ! -f "$(GPGPUSIM_POWER_MODEL)/gpgpu_sim.verify" ]; then \
echo ""; \
echo "ERROR ** Power model directory invalid."; \
echo "gpgpu_sim.verify not found in $(GPGPUSIM_POWER_MODEL)."; \
echo "Please ensure that GPGPUSIM_POWER_MODEL points to a valid gpuwattch directory and that you have the correct GPGPU-Sim mcpat distribution."; \
echo ""; \
exit 102; \
fi
#下面,打印输出不支持 OpenCL 的信息;
no_opencl_support:
@echo "Warning: gpgpu-sim is building without opencl support. Make sure NVOPENCL_LIBDIR and NVOPENCL_INCDIR are set"
#下面,目标 libcudart.so 的构建规则
$(SIM_LIB_DIR)/libcudart.so: makedirs $(LIBS) cudalib
g++ -shared -Wl,-soname,libcudart.so \
$(SIM_OBJ_FILES_DIR)/libcuda/*.o \
$(SIM_OBJ_FILES_DIR)/cuda-sim/*.o \
$(SIM_OBJ_FILES_DIR)/cuda-sim/decuda_pred_table/*.o \
$(SIM_OBJ_FILES_DIR)/gpgpu-sim/*.o \
$(SIM_OBJ_FILES_DIR)/$(INTERSIM)/*.o \
$(SIM_OBJ_FILES_DIR)/*.o -lm -lz -lGL -pthread \
$(MCPAT) \
-o $(SIM_LIB_DIR)/libcudart.so
if [ ! -f $(SIM_LIB_DIR)/libcudart.so.2 ]; then ln -s libcudart.so $(SIM_LIB_DIR)/libcudart.so.2; fi
if [ ! -f $(SIM_LIB_DIR)/libcudart.so.3 ]; then ln -s libcudart.so $(SIM_LIB_DIR)/libcudart.so.3; fi
if [ ! -f $(SIM_LIB_DIR)/libcudart.so.4 ]; then ln -s libcudart.so $(SIM_LIB_DIR)/libcudart.so.4; fi
#下面,如果是在 Mac OS 中,目标 libcudart.dylib 的构建规则
$(SIM_LIB_DIR)/libcudart.dylib: makedirs $(LIBS) cudalib
g++ -dynamiclib -Wl,-headerpad_max_install_names,-undefined,dynamic_lookup,-compatibility_version,1.1,-current_version,1.1\
$(SIM_OBJ_FILES_DIR)/libcuda/*.o \
$(SIM_OBJ_FILES_DIR)/cuda-sim/*.o \
$(SIM_OBJ_FILES_DIR)/cuda-sim/decuda_pred_table/*.o \
$(SIM_OBJ_FILES_DIR)/gpgpu-sim/*.o \
$(SIM_OBJ_FILES_DIR)/$(INTERSIM)/*.o \
$(SIM_OBJ_FILES_DIR)/*.o -lm -lz -pthread \
$(MCPAT) \
-o $(SIM_LIB_DIR)/libcudart.dylib
#下面,目标 libOpenCL.so 的构建规则
$(SIM_LIB_DIR)/libOpenCL.so: makedirs $(LIBS) opencllib
g++ -shared -Wl,-soname,libOpenCL.so \
$(SIM_OBJ_FILES_DIR)/libopencl/*.o \
$(SIM_OBJ_FILES_DIR)/cuda-sim/*.o \
$(SIM_OBJ_FILES_DIR)/cuda-sim/decuda_pred_table/*.o \
$(SIM_OBJ_FILES_DIR)/gpgpu-sim/*.o \
$(SIM_OBJ_FILES_DIR)/$(INTERSIM)/*.o \
$(SIM_OBJ_FILES_DIR)/*.o -lm -lz -lGL -pthread \
$(MCPAT) \
-o $(SIM_LIB_DIR)/libOpenCL.so
if [ ! -f $(SIM_LIB_DIR)/libOpenCL.so.1 ]; then ln -s libOpenCL.so $(SIM_LIB_DIR)/libOpenCL.so.1; fi
if [ ! -f $(SIM_LIB_DIR)/libOpenCL.so.1.1 ]; then ln -s libOpenCL.so $(SIM_LIB_DIR)/libOpenCL.so.1.1; fi
#下面,目标cudalib 的构建规则
cudalib: makedirs cuda-sim
$(MAKE) -C ./libcuda/ depend
$(MAKE) -C ./libcuda/
#下面,目标 mcpat 的构建规则
ifneq ($(GPGPUSIM_POWER_MODEL),)
mcpat: makedirs
$(MAKE) -C $(GPGPUSIM_POWER_MODEL) depend
$(MAKE) -C $(GPGPUSIM_POWER_MODEL) $(MCPAT_DBG_FLAG)
endif
#下面,构建 cuda-sim 库
cuda-sim: makedirs
$(MAKE) -C ./src/cuda-sim/ depend
$(MAKE) -C ./src/cuda-sim/
#下面,构建 gpgpu-sim 核心库,以及依赖
gpgpu-sim_uarch: makedirs cuda-sim
$(MAKE) -C ./src/gpgpu-sim/ depend
$(MAKE) -C ./src/gpgpu-sim/
#下面,
$(INTERSIM): makedirs cuda-sim gpgpu-sim_uarch
$(MAKE) "CREATE_LIBRARY=1" "DEBUG=$(DEBUG)" -C ./src/$(INTERSIM)
#下面,构建 gpgpu-sim 核心库及其相关库,以及依赖
gpgpusimlib: makedirs cuda-sim gpgpu-sim_uarch $(INTERSIM)
$(MAKE) -C ./src/ depend
$(MAKE) -C ./src/
#下面,构建 opencl 相关的 lib,及其依赖
opencllib: makedirs cuda-sim
$(MAKE) -C ./libopencl/ depend
$(MAKE) -C ./libopencl/
#下面,构建 cuobjdump_to_ptxplus,及其依赖
.PHONY: cuobjdump_to_ptxplus/cuobjdump_to_ptxplus
cuobjdump_to_ptxplus/cuobjdump_to_ptxplus: makedirs
$(MAKE) -C ./cuobjdump_to_ptxplus/ depend
$(MAKE) -C ./cuobjdump_to_ptxplus/
#下面,创建需要的文件夹
makedirs:
if [ ! -d $(SIM_LIB_DIR) ]; then mkdir -p $(SIM_LIB_DIR); fi;
if [ ! -d $(SIM_OBJ_FILES_DIR)/libcuda ]; then mkdir -p $(SIM_OBJ_FILES_DIR)/libcuda; fi;
if [ ! -d $(SIM_OBJ_FILES_DIR)/cuda-sim ]; then mkdir -p $(SIM_OBJ_FILES_DIR)/cuda-sim; fi;
if [ ! -d $(SIM_OBJ_FILES_DIR)/cuda-sim/decuda_pred_table ]; then mkdir -p $(SIM_OBJ_FILES_DIR)/cuda-sim/decuda_pred_table; fi;
if [ ! -d $(SIM_OBJ_FILES_DIR)/gpgpu-sim ]; then mkdir -p $(SIM_OBJ_FILES_DIR)/gpgpu-sim; fi;
if [ ! -d $(SIM_OBJ_FILES_DIR)/libopencl ]; then mkdir -p $(SIM_OBJ_FILES_DIR)/libopencl; fi;
if [ ! -d $(SIM_OBJ_FILES_DIR)/libopencl/bin ]; then mkdir -p $(SIM_OBJ_FILES_DIR)/libopencl/bin; fi;
if [ ! -d $(SIM_OBJ_FILES_DIR)/$(INTERSIM) ]; then mkdir -p $(SIM_OBJ_FILES_DIR)/$(INTERSIM); fi;
if [ ! -d $(SIM_OBJ_FILES_DIR)/cuobjdump_to_ptxplus ]; then mkdir -p $(SIM_OBJ_FILES_DIR)/cuobjdump_to_ptxplus; fi;
if [ ! -d $(SIM_OBJ_FILES_DIR)/gpuwattch ]; then mkdir -p $(SIM_OBJ_FILES_DIR)/gpuwattch; fi;
if [ ! -d $(SIM_OBJ_FILES_DIR)/gpuwattch/cacti ]; then mkdir -p $(SIM_OBJ_FILES_DIR)/gpuwattch/cacti; fi;
#下面,终极目标
all:
$(MAKE) gpgpusim
#下面,构建文档
docs:
$(MAKE) -C doc/doxygen/
#下面,清除文档
cleandocs:
$(MAKE) clean -C doc/doxygen/
#下面,清除构建的目标和构建出来的文档
clean: makedirs
$(MAKE) cleangpgpusim
#下面,清除构建的目标和中间文件
cleangpgpusim: cleandocs
rm -rf $(SIM_LIB_DIR)
rm -rf $(SIM_OBJ_FILES_DIR)
3.2
3.3
3.4
3.5




![[S2] Challenge 25 心脏病预测](https://img-blog.csdnimg.cn/img_convert/334ff0abe24613a2112a5b0e18157dc3.png)