目录
一、先来先服务算法
1、算法思想
2、算法规则
3、用于作业/进程调度
4、是否可抢占?
5、优缺点
优点:
缺点:
6、是否会导致饥饿
7、例子
二、短作业优先算法
1、算法思想
2、算法规则
3、用于作业/进程调度
4、是否可抢占?
5、优缺点
优点:
缺点:
6、是否会导致饥饿
7、例子
(1)非抢占式
(2)抢占式
三·、最高响应比优先算法
1、算法思想
2、算法规则
3、用于作业/进程调度
4、是否可抢占?
5、优缺点
6、是否会导致饥饿
7、例子
注意:
一、先来先服务算法
1、算法思想
主要从“公平”的角度考虑(类似于我们生活中排队买东西的例子)
2、算法规则
按照作业/进程到达的先后顺序进行服务
3、用于作业/进程调度
用于作业调度时,考虑的是哪个作业先到达后备队列;
用于进程调度时,考虑的是哪个进程先到达就绪队列。
4、是否可抢占?
非抢占式的算法
5、优缺点
优点:
公平、算法实现简单
缺点:
排在长作业(进程)后面的短作业需要等待很长时间,带权周转时间很大,对短作业来说用户体验不好。
即,FCFS算法对长作业有利,对短作业不利(Eg :排队买奶茶.)
6、是否会导致饥饿
不会导致饥饿
7、例子

(1)根据先来先服务的规则,调度顺序是P1,P2,P3,P4。

二、短作业优先算法
1、算法思想
追求最少的平均等待时间,最少的平均周转时间、最少的平均带权周转时间。
2、算法规则
最短的作业或进程先得到服务(所谓“最短”,是指要求服务时间最短)
3、用于作业/进程调度
即可用于作业调度,也可用于进程调度。
用于进程调度时称为“短进程优先(SPF, Shortest Process First)算法”。
4、是否可抢占?
SJF和SPF是非抢占式的算法。
但是,也有抢占式的版本――最短剩余时间优先算法( SRTN, Shortest Remaining Time Next)
5、优缺点
优点:
“最短的”平均等待时间、平均周转时间。
缺点:
不公平。对短作业有利,对长作业不利。可能产生饥饿现象。另外,作业/进程的运行时间是由用户提供的,并不一定真实,不一定能做到真正的短作业优先。
6、是否会导致饥饿
会。
如果源源不断地有短作业/进程到来,可能使长作业/进程长时间得不到服务,产生“饥饿”现象。
如果一直得不到服务,则称为“饿死”。
7、例子
(1)非抢占式

(2)抢占式


三·、最高响应比优先算法
1、算法思想
要综合考虑作业/进程的等待时间和要求服务的时间
2、算法规则
在每次调度时先计算各个作业/进程的响应比,选择响应比最高的作业/进程为其服务。

3、用于作业/进程调度
即可用于作业调度,也可用于进程调度。
4、是否可抢占?
非抢占式的算法。
因此只有当前运行的作业/进程主动放弃处理机时,才需要调度,才需要计算响应比。
5、优缺点
综合考虑了等待时间和运行时间(要求服务时间)
等待时间相同时,要求服务时间短的优先(SJF的优点)
要求服务时间相同时,等待时间长的优先(FCFS的优点)
对于长作业来说,随着等待时间越来越久,其响应比也会越来越大,从而避免了长作业饥饿的问题
6、是否会导致饥饿
不会
7、例子
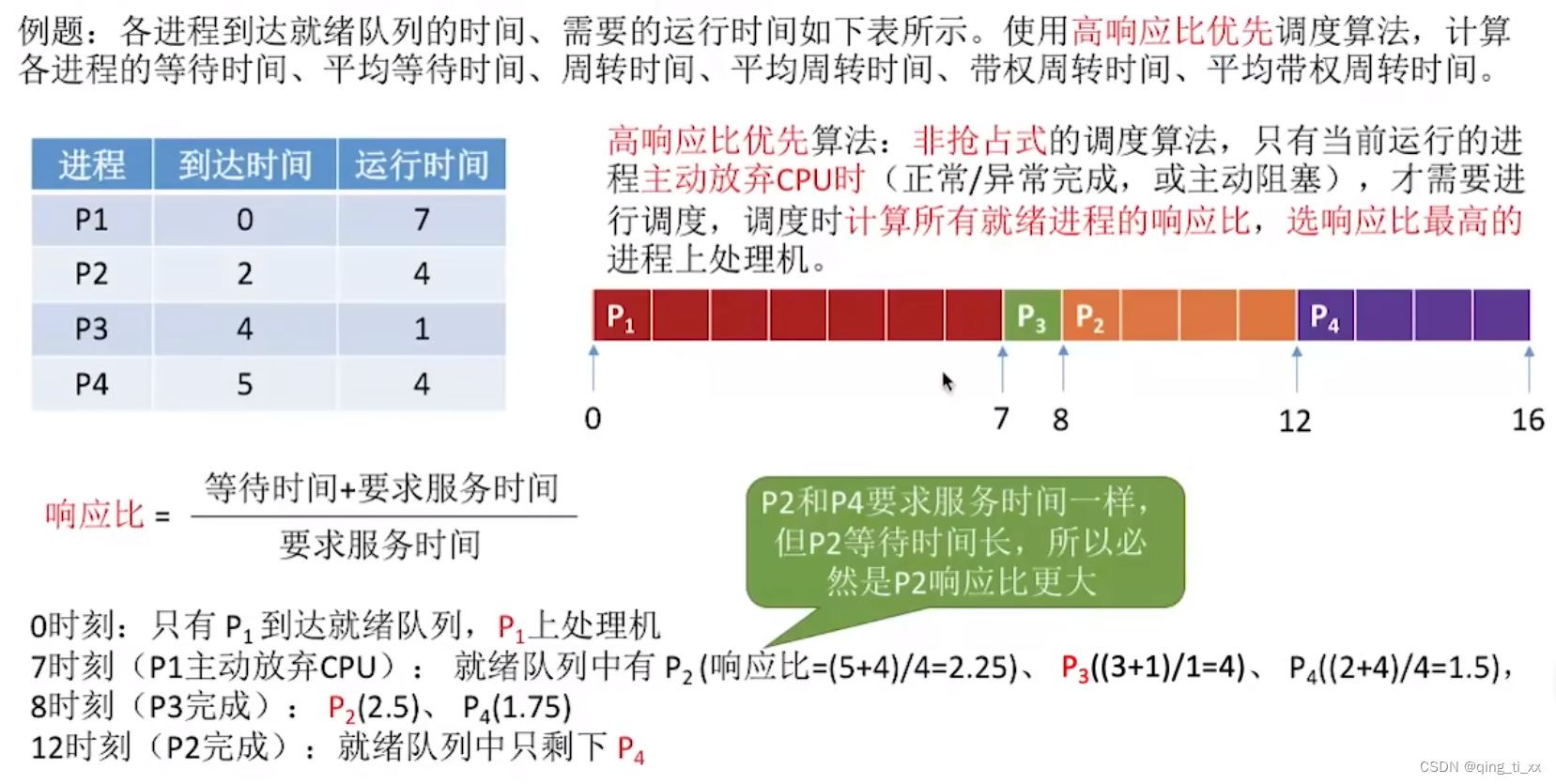
每次进程结束后都要重新计算响应比。
注意:
(1)这几种算法主要关心对用户的公平性、平均周转时间、平均等待时间等评价系统整体性能的指标,但是不关心“响应时间”,也并不区分任务的紧急程度,因此对于用户来说,交互性很糟糕。
(2)因此这三种算法一般适合用于早期的批处理系统,当然,FCFS算法也常结合其他的算法使用,在现在也扮演着很重要的角色。