目录
- 0 专栏介绍
- 1 为什么需要地图真值?
- 2 Gazebo插件实现
- 2.1 单线扫描碰撞信息
- 2.2 写入.pgm地图文件
- 2.3 写入.yaml元文件
- 3 快速建图测试
- 4 机器人导航测试
0 专栏介绍
本专栏旨在通过对ROS的系统学习,掌握ROS底层基本分布式原理,并具有机器人建模和应用ROS进行实际项目的开发和调试的工程能力。
🚀详情:《ROS从入门到精通》
1 为什么需要地图真值?
栅格地图真值不会受到传感器误差、环境变化等因素的影响,导致地图的不确定性和误差。地图真值可以用作SLAM算法的评估指标,帮助研究人员和开发者了解SLAM算法在不同环境和条件下的性能表现。
通过将SLAM生成的地图与栅格地图真值进行对比,可以识别出SLAM算法的优势、局限性和改进方向,以及进行算法调试和参数优化。在一些对地图精度要求较高的应用中,使用栅格地图真值进行评估和对比可以提供更可靠的结果。同时,栅格地图真值可以用于生成合成数据集,从而扩大数据集的规模和多样性。通过将真实数据与栅格地图真值结合,可以创建具有不同特征、噪声和变化的合成数据集,用于训练和验证SLAM算法的鲁棒性和泛化能力。
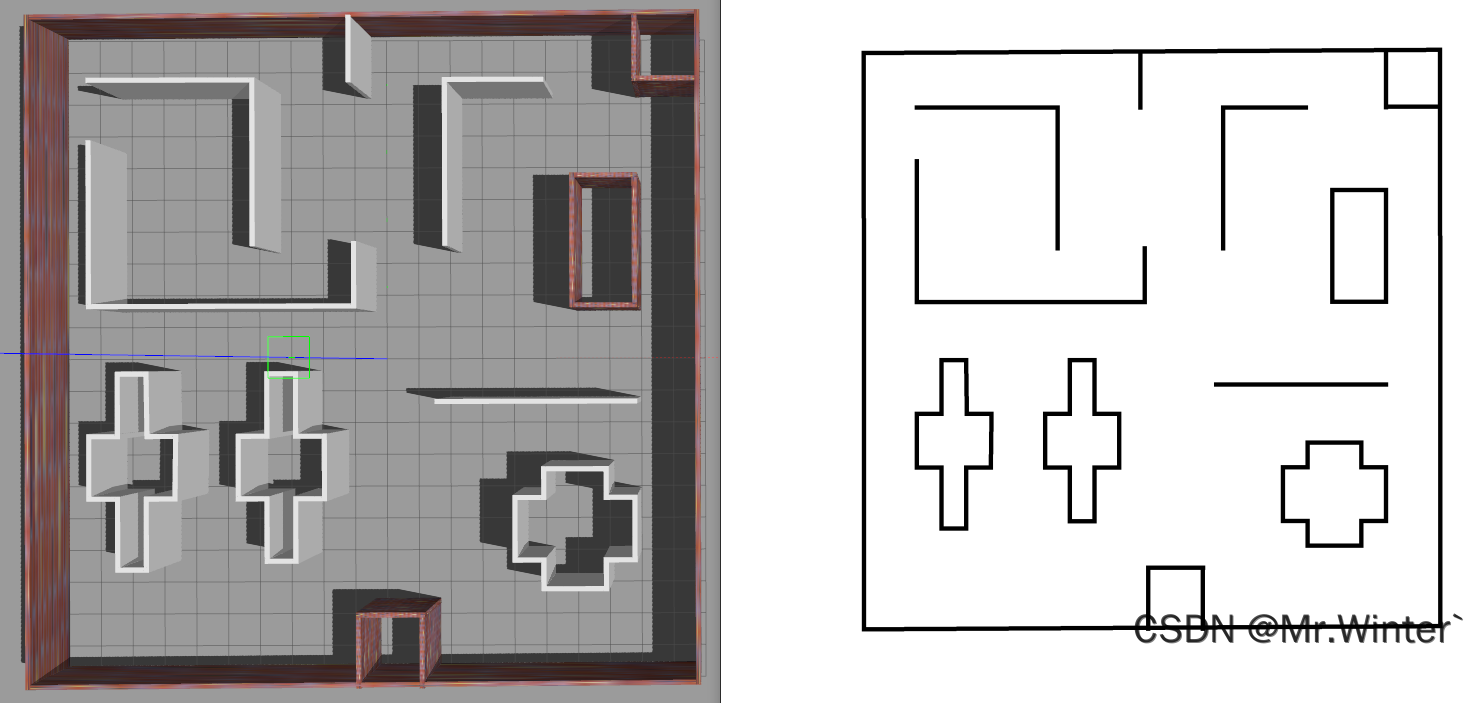
如下所示是通过SLAM建立的地图(左)和对应的地图真值(右)


接下来介绍如何基于Gazebo世界场景,快速生成二维地图真值
2 Gazebo插件实现
2.1 单线扫描碰撞信息
原理是基于Gazebo的RayShape引擎,扫描一定高度下世界环境中的障碍物,并把障碍物信息映射到二维地图上。在仿真环境中,这种扫描绝对精准,因此建立的地图是真值地图
核心代码如下所示
gazebo::physics::PhysicsEnginePtr engine = world->Physics();
engine->InitForThread();
gazebo::physics::RayShapePtr ray =
boost::dynamic_pointer_cast<gazebo::physics::RayShape>(
engine->CreateShape("ray", gazebo::physics::CollisionPtr()));
boost::gil::fill_pixels(image._view, blank);
for (int i = 0; i < count_vertical; ++i)
{
x = i * dX_vertical + msg->lowerleft().x();
y = i * dY_vertical + msg->lowerleft().y();
for (int j = 0; j < count_horizontal; ++j)
{
x += dX_horizontal;
y += dY_horizontal;
start.X(x);
end.X(x);
start.Y(y);
end.Y(y);
ray->SetPoints(start, end);
ray->GetIntersection(dist, entityName);
if (!entityName.empty())
image._view(i, j) = fill;
}
}
2.2 写入.pgm地图文件
将扫描的障碍信息保存到.pgm地图文件中
void pgm_write_view(CollisionMapRequestPtr &msg, boost::gil::gray8_view_t &view)
{
// Write image to pgm file
std::cout << "running" << std::endl;
int h = view.height();
int w = view.width();
std::ofstream ofs;
ofs.open(msg->filename() + ".pgm");
ofs << "P2" << '\n'; // grayscale
ofs << w << ' ' << h << '\n'; // width and height
ofs << 255 << '\n'; // max value
for (int y = 0; y < h; ++y)
{
for (int x = 0; x < w; ++x)
ofs << (int)view(x, y)[0] << ' ';
ofs << '\n';
}
ofs.close();
}
2.3 写入.yaml元文件
保存用于导航的地图元文件
void yaml_write(CollisionMapRequestPtr &msg)
{
std::string map_meta_file = msg->filename() + ".yaml";
std::cout << "Writing map occupancy data to " << map_meta_file << std::endl;
FILE *yaml = fopen(map_meta_file.c_str(), "w");
// resolution: 0.100000
// origin: [0.000000, 0.000000, 0.000000]
// #
// negate: 0
// occupied_thresh: 0.65
// free_thresh: 0.196
fprintf(yaml,
"image: %s\nresolution: %f\norigin: [%f, %f, 0.00]\nnegate: 0\noccupied_thresh: 0.65\nfree_thresh: 0.196\n\n",
(msg->filename() + ".pgm").c_str(), msg->resolution(),
msg->lowerleft().x(), msg->lowerleft().y());
fclose(yaml);
}
3 快速建图测试
使用时在需要建图的.world文件中加入世界插件
<plugin filename="libcollision_map_creator.so" name="collision_map_creator"/>
接着启动一个终端打开三维世界
<launch>
<arg name="world_file" default="$(find pgm_map_creator)/worlds/workshop.world"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="use_sim_time" value="true"/>
<arg name="debug" value="false"/>
<arg name="gui" value="true" />
<arg name="world_name" value="$(arg world_file)"/>
</include>
</launch>
最后在新终端启动扫描建图功能包,发送建图请求
<launch>
<arg name="map_name" default="map" />
<arg name="save_folder" default="$(find pgm_map_creator)/maps" />
<arg name="xmin" default="-15" />
<arg name="xmax" default="15" />
<arg name="ymin" default="-15" />
<arg name="ymax" default="15" />
<arg name="scan_height" default="5" />
<arg name="resolution" default="0.01" />
<node pkg="pgm_map_creator" type="request_publisher" name="request_publisher" output="screen"
args="'($(arg xmin),$(arg ymax))($(arg xmax),$(arg ymax))($(arg xmax),$(arg ymin))($(arg xmin),$(arg ymin))'
$(arg scan_height) $(arg resolution) $(arg save_folder)/$(arg map_name)">
</node>
</launch>
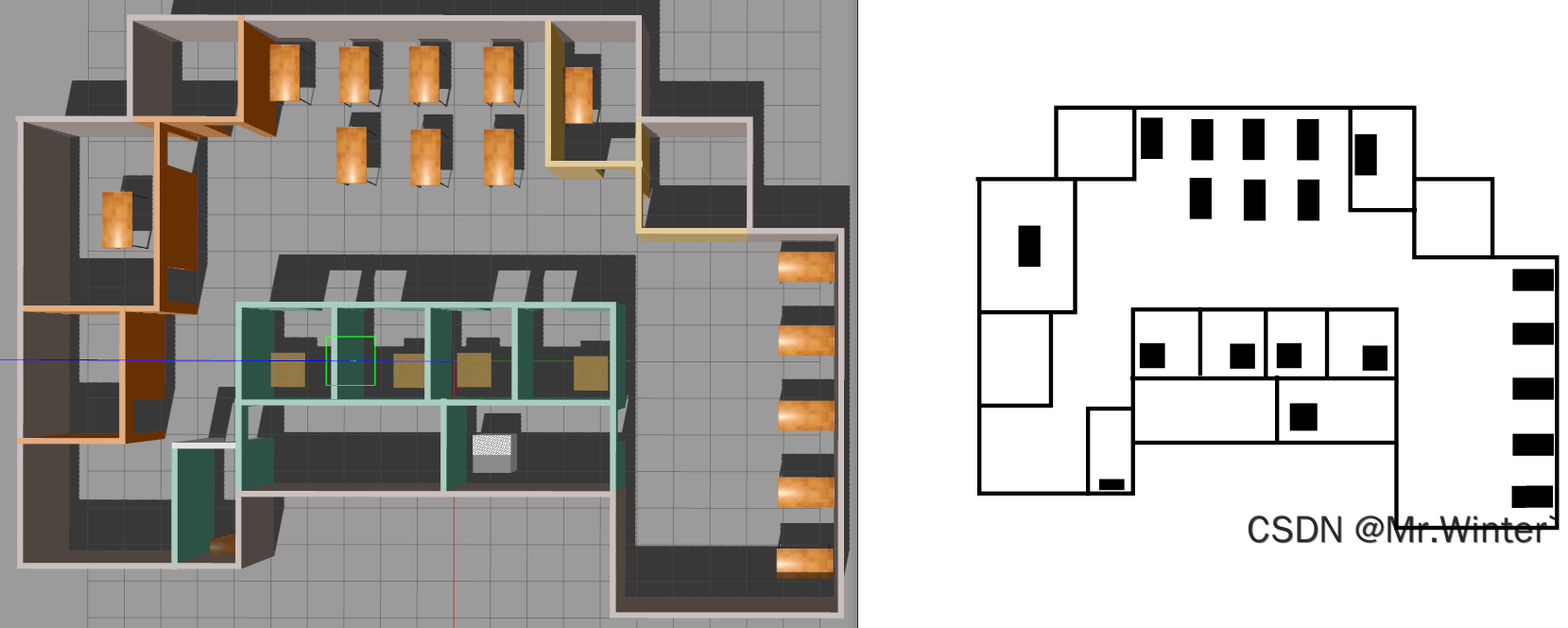
下面是两个建立地图真值的实例
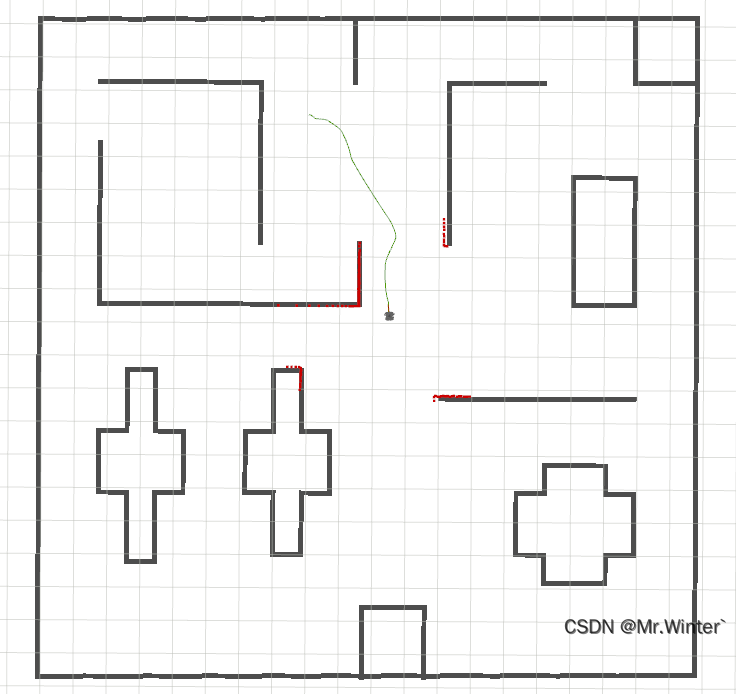
4 机器人导航测试
建立的地图可以很好地应用于机器人导航,在部分运动规划实验中可以实现与建图过程的解耦
本文完整工程代码请通过下方名片联系博主获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《Pytorch深度学习实战》
- 《机器学习强基计划》
- 《运动规划实战精讲》
- …