P
(
x
t
P(x_t
P(xt|
x
t
−
1
)
x_{t-1})
xt−1) |
P
(
y
t
P(y_t
P(yt|
x
t
)
x_t)
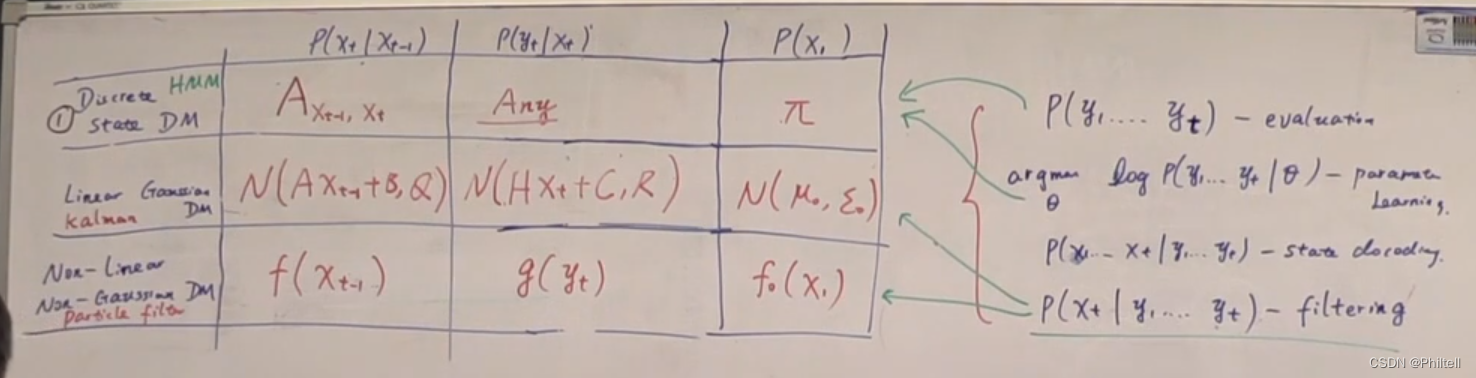
xt) | P ( x 1 ) P(x_1) P(x1) | |
|---|---|---|---|
| Discrete State DM | A X t − 1 , X t A_{X_{t-1},X_t} AXt−1,Xt | Any | π \pi π |
| Linear Gassian Kalman DM | N ( A X t − 1 + B , Q ) N(AX_{t-1}+B,Q) N(AXt−1+B,Q) | N ( H X t + C , R ) N(HX_t+C,R) N(HXt+C,R) | N ( μ 0 , ϵ 0 ) N(\mu_0,\epsilon_0) N(μ0,ϵ0) |
| No-Linear NoGaussian DM | f ( x t − 1 ) f(x_{t-1}) f(xt−1) | g ( y t ) g(y_t) g(yt) | f ( x 1 ) f(x_1) f(x1) |
{
P
(
y
1
,
.
.
.
,
y
t
)
−
−
e
v
a
l
u
a
t
i
o
n
a
r
g
m
e
n
t
θ
log
P
(
y
1
,
.
.
.
,
y
t
∣
θ
)
−
−
p
a
r
a
m
e
t
e
r
l
e
a
r
n
i
n
g
P
(
x
1
,
.
.
.
,
x
t
∣
y
1
,
.
.
.
,
y
t
)
−
s
t
a
t
e
d
e
c
o
d
i
n
g
P
(
x
t
∣
y
1
,
.
.
,
y
t
)
−
f
i
l
t
e
r
i
n
g
\left\{ \begin{aligned} P(y_1,...,y_t)--evaluation\\ argment \theta \log{P(y1,...,y_t|\theta)}--parameter learning \\ P(x_1,...,x_t|y_1,...,y_t)-state decoding \\ P(x_t | y_1,..,y_t)-filtering \end{aligned} \right.
⎩
⎨
⎧P(y1,...,yt)−−evaluationargmentθlogP(y1,...,yt∣θ)−−parameterlearningP(x1,...,xt∣y1,...,yt)−statedecodingP(xt∣y1,..,yt)−filtering
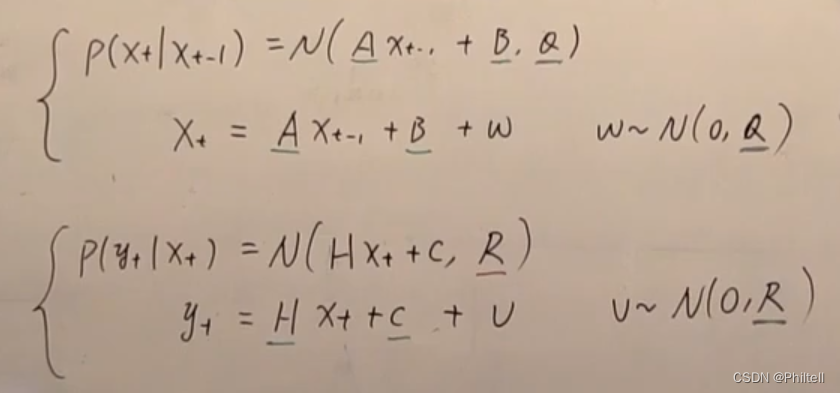
线性高斯噪声的动态模型
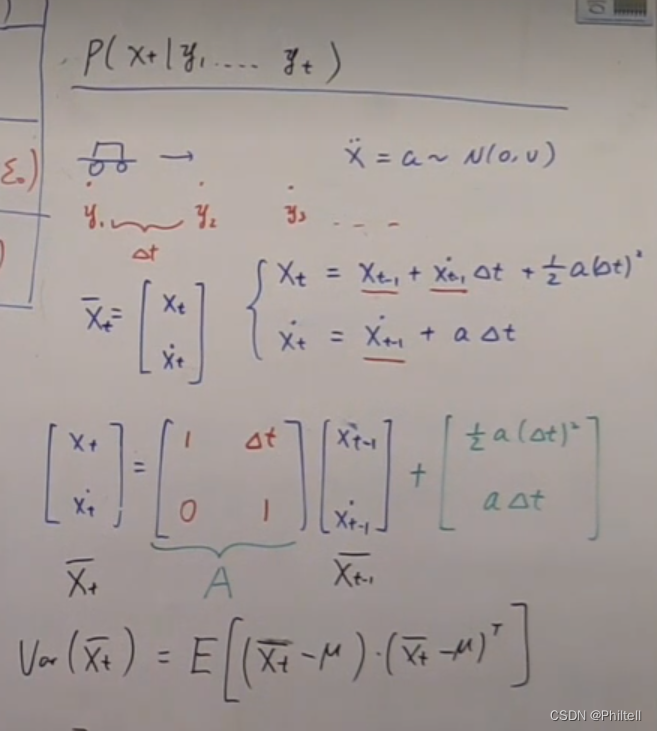
P
(
x
t
∣
y
1
,
.
.
.
,
y
t
)
P(x_t|y_1,...,y_t)
P(xt∣y1,...,yt)
假设转移概率是
P
(
x
t
∣
X
t
−
1
)
=
N
(
A
X
t
−
1
+
B
,
Q
)
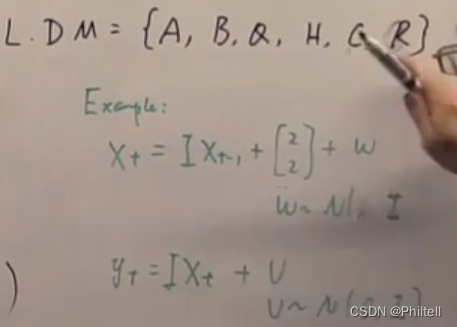
P(x_t|X_{t-1})= N(AX_{t-1}+B,Q)
P(xt∣Xt−1)=N(AXt−1+B,Q)
X
t
=
A
X
t
−
1
+
B
+
ω
X_t = AX_{t-1}+B+\omega
Xt=AXt−1+B+ω ,
ω
∼
N
(
0
,
Q
)
\omega \sim N(0,Q)
ω∼N(0,Q)
measurement probility
P
(
y
t
∣
x
t
)
=
N
(
H
X
t
+
C
,
R
)
P(y_t|x_t) = N(HX_t+C,R)
P(yt∣xt)=N(HXt+C,R)
y
t
=
H
X
t
+
C
+
v
y_t = HX_t+C+v
yt=HXt+C+v
v
∼
N
(
0
,
R
)
v \sim N(0,R)
v∼N(0,R)
以下都是参数。