辅助驾驶功能开发-控制篇(01)-基于PID的横向控制算法
news2026/2/14 0:46:04

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1003848.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

类和对象【基础概念】
全文目录 类的定义定义方式 类的访问限定符封装(面向对象的三大特性之一) 类对象模型类对象的存储方式类对象的大小计算 this指针this指针的特性**this指针可以为空吗?** 类的定义
在C中,C语言中的结构体struct中除了定义变量外还…
深度学习中softmax激活函数的用法
在深度学习中,“softmax” 是一种常用的激活函数,它主要用于多类别分类任务中的输出层。“Softmax” 是 “soft maximum” 的缩写,它通过将输入的实数向量转换为概率分布,用于表示相应类别的概率。
Tomcat多实例部署和动静分离
一、多实例部署: 多实例:多实例就是在一台服务器上同时开启多个不同的服务端口,同时运行多个服务进程,这些服务进程通过不同的socket监听不同的服务端口来提供服务。 1.前期准备:
1.关闭防火墙:systemctl …

Postman —— 配置环境变量
PostMan是一套比较方便的接口测试工具,但我们在使用过程中,可能会出现创建了API请求,但API的URL会随着服务器IP地址的变化而改变。
这样的情况下,如果每一个API都重新修改URL的话那将是非常的麻烦,所以PostMan中也提供…

【宝藏系列】几款好用的 Spring Boot 内置工具类
【宝藏系列】几款好用的 Spring Boot 内置工具类 文章目录 【宝藏系列】几款好用的 Spring Boot 内置工具类断言对象字符串集合文件资源IO 流反射AOP🍉文末推荐【深入浅出Java虚拟机】 断言 断言是一个逻辑判断,用于检查不应该发生的情况 Assert 关键字…

ARM接口编程—IIC总线(exynos 4412平台)
IIC总线简介 IIC总线是Philips公司在八十年代初推出的一种串行、半双工总线 主要用于近距离、低速的芯片之间的通信;IIC总线有两根双向的信号线一根数据线SDA用于收发数据,一根时钟线SCL用于通信双方时钟的同步;IIC总线硬件结构简单ÿ…

Vim9用netrw快速打开文件
Vim9有一个自带的文件浏览器——netrw,它的功能很强大。今天我们给它添加两个快捷命令:
Ctrl回车键,一次打开多个文件Alt回车键,打开文件后自动关闭目录窗口
一、修改vimrc文件:
操作路径:编辑》启动设置…

Python判断多个文件夹的文件夹名是否包含“分公司”或“营销中心”怎么处理?(方法二)...
点击上方“Python爬虫与数据挖掘”,进行关注 回复“书籍”即可获赠Python从入门到进阶共10本电子书 今 日 鸡 汤 先帝称之曰能,是以众议举宠为督。 大家好,我是皮皮。 一、前言 前几天在Python最强王者群【哎呦喂 是豆子~】问了一…
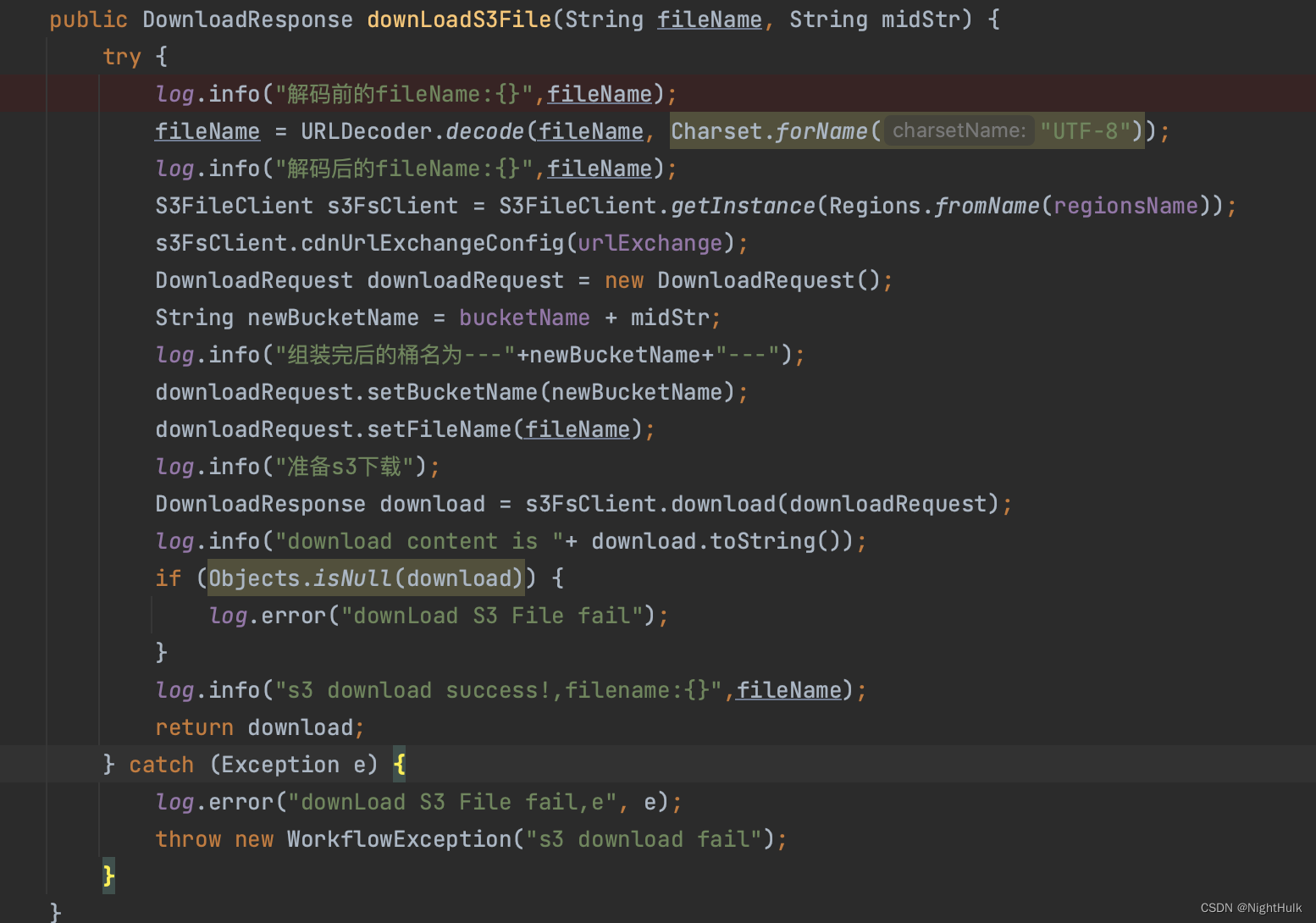
AmazonS3Exception: The specified key does not exist
使用S3近端包下载文件时,遇到这个问题,感觉像是设置的桶名称或者文件名没有找到,最后发现是桶名最后多了一个”/“,S3是根据桶名称文件名寻址,中间不需要添加/
报错桶名:https://img-cdn.abc.com/eb3e9d5d…

机器学习(12)---梯度下降(含手写公式、推导过程和手写例题)
梯度下降 一、概述1.1 梯度下降的用途1.2 梯度下降公式 二、公式讲解2.1 推导过程2.2 例题 一、概述
1.1 梯度下降的用途 1. 使用线性回归的平方误差成本函数时,成本函数不会也永远不会有多个局部最小值。因为它是凸函数,只有单一的全局最小值。通俗地说…
java word文档 转 html文件
用java将word转为html文档 1、简介2、添加依赖3、代码示例 1、简介
最近,因项目需要,需要对word文档进行解析拆分,感觉直接解析word有点麻烦,于是想到,先将word转为html文档,然后用jsoup解析html文件更方便…
Debian 12快速安装图解
文章目录 Debian 12安装图解创建虚拟机安装系统登录并用光盘离线安装sudo、curl解决Linux下sudo更改文件权限报错保存快照debain添加在线源(配置清华源)参考 Debian 12安装图解
Debian选择CD安装非常慢,本次安装选择DVD离线安装。
下载 https://www.debian.org/CD…

【遥感变化检测综述】—《多时相遥感影像的变化检测研究现状与展望》
作者:张 祖 勋,姜 慧 伟,庞 世 燕,胡 翔 云 论文连接:多时相遥感影像的变化检测研究现状与展望 — 张祖勋 1、内容概述
本文主要从几何和语义两个角度对变化检测方法进行了分析和归纳总结,重点分析了几何信…
SpringMVC之CRUD(增删改查)
SpringMVC之CRUD(增删改查) 数据库 # 创建表CREATE TABLE Student (sid INT PRIMARY KEY,sname VARCHAR(50),sage INT,spic VARCHAR(255));给student表插入数据
INSERT INTO Student (sid, sname, sage, spic)
VALUES
(1, John Do, 25, path/to/image1.jpg),
(2, Jane Smith, …
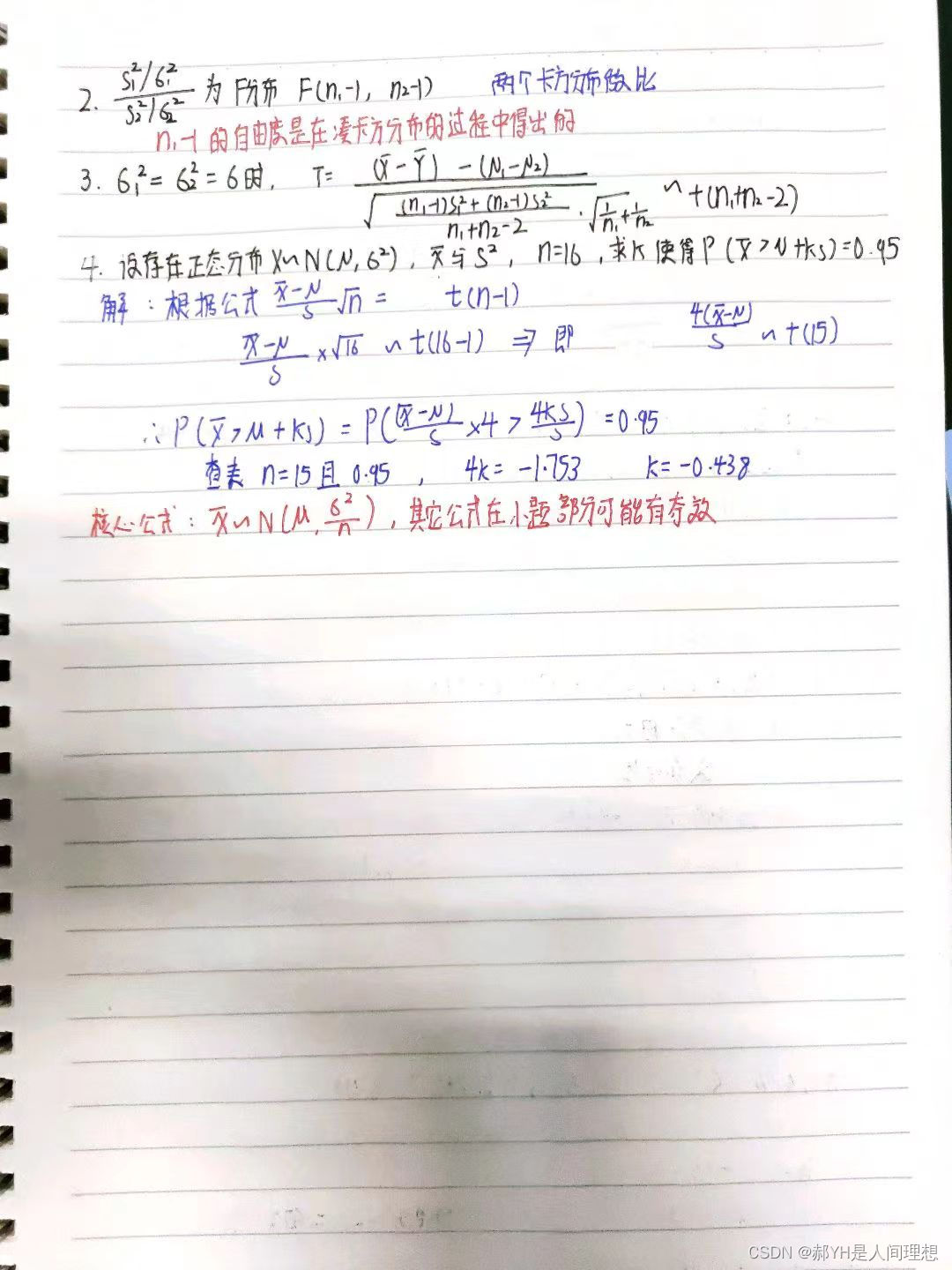
宋浩概率论笔记(六)样本与统计量
参数估计的入门章节,为后面的参数估计与假设检验铺垫基础,难点在于背诵公式,此外对于统计量的理解一定要清晰——本质是多个随机变量复合而成的函数~

【Jenkins】pipeline流水线
【Jenkins】pipeline 【一】什么是pipeline?【二】pipeline任务【1】安装pipeline插件【2】创建pipeline任务(1)新增任务,选择流水线(2)Pipeline定义有两种方式: 【3】Pipeline Script 运行任务…

【云平台】遥感地信云平台收录
文章目录 国内1 航天宏图PIE-Engine2 商汤科技3 AI Earth4 EarthDataMiner国外结语国内
1 航天宏图PIE-Engine
https://engine.piesat.cn/live-show-list 在这里插入图片描述
2 商汤科技
https://senseearth-cloud.com/map 3 AI Earth
https://engine-aiearth.aliyun.com…

一场深刻的开源聚会:KCC@北京 9.2 活动回顾
开源为我们带来了什么?这是这场聚会的宣传文的标题:https://mp.weixin.qq.com/s/5sR6TPEpQmYNBnCtVilkzg 同样这个问题也可以是极具个体化的:开源为我带来了什么?秋天的周末,预报有雨,北京的开源人还是相聚…