本篇开始将会介绍与开发版相关的Qt项目,首先从点亮一个LED开始。I.MX6U和STM32MP157的相关信息都会用到,但是后期还是将I.MX6U的学习作为重点。当然其他开发版的开发也可以参考本博文。
文章目录
- 1. Qt是如何操控开发板上的一个LED
- 2. 出厂内核设备树中注册的LED设备
- 3. 如何去使用驱动提供的应用层接口
- 3.1 如何通过按钮控制LED
- 3.1.1 需要先找到接口
- 3.1.2 如何访问该接口
- 3.2 开发UI程序控制LED灯
- 3.2.1 在源文件“mainwindow.h”的代码如下
- 3.2.2 在源文件“mainwindow.cpp” 的代码如下
- 4. 程序运行效果
- 4.1 Ubuntu 上仿真界面的效果
- 4.2 板卡上运行效果
1. Qt是如何操控开发板上的一个LED
Qt是无法直接控制开发板上的硬件,那么它是如何操控开发板上的硬件的呢?
从下图可以看到是Qt通过驱动层提供的接口来操控开发板上的硬件。
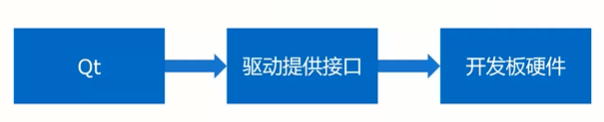
关于驱动提供的接口可以从正点原子的驱动和试用教程,具体在哪?后期找一下。
如果你是应用开发人员,就要问驱动人员提供的接口信息。
2. 出厂内核设备树中注册的LED设备
此部分没有特别清楚,大概讲的应该就是Linux系统安装中2.3 硬件设备文件名中内容。
I.MX6U和STM32MP157的出厂系统如下:
- I.MX6U设备树路径为:arch/arm/boot/dts/imx6ull-14x14-evk.dts
- STM32MP157设备树路径为:arch/arm/boot/dts/stm32mp157d-atk.dtsi
(1)要找到设备树,先找到Linux源码
在“01、例程源码\03、正点原子Uboot和Linux出厂源码”下文件内容如下:

应用层访问的ID设备,都是在上图框选的Linux源码配置的,如何编译这个源码,正点原子的其他教程中做了介绍,此处不再做介绍。
(2)下面应该就是Linux源码的关于LED灯部分的内容

上图为I.MX6U的,led节点,其中是一个LED即led1,配置了sys.led,也就是系统ID,即收到货时闪的那个led,其中的heartbeat代表正在运行,gpio.leds代表驱动,本篇使用到的也就是该LED。
3. 如何去使用驱动提供的应用层接口
想要控制这个 LED,首先I.MX6U的出厂内核已经默认将这个 LED 注册成了 gpio-leds类型设备(驱动层配置给应用层的接口)。 所以我们可以直接在应用层接口直接可以操作这个 LED 设备。(如果搞了一些移植,有可能LED没有配置,就无法正常使用)
以下将会介绍如何查找和使用接口控制LED灯的过程。
3.1 如何通过按钮控制LED
3.1.1 需要先找到接口
在“10、用户手册/01【正点原子】I.MX6U用户快速体验V2.6.pdf”中查找说明
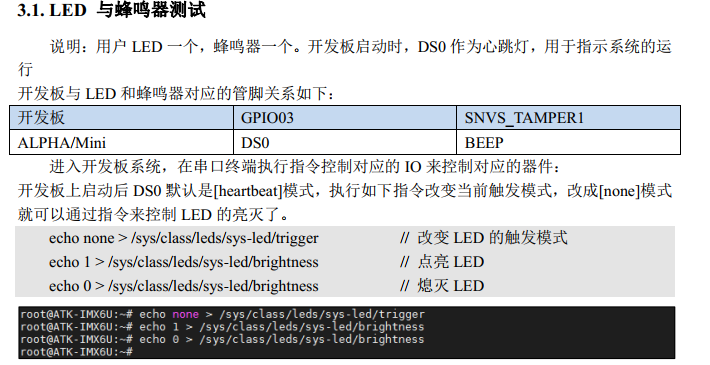
上图中驱动提供的对应的接口文件即为:
echo none > /sys/class/leds/sys-led/trigger // 改变 LED 的触发模式
echo 1 > /sys/class/leds/sys-led/brightness // 向接口写1点亮 LED
echo 0 > /sys/class/leds/sys-led/brightness // 向接口写0熄灭 LED
3.1.2 如何访问该接口
我们在 Qt 里有很多种方法可以控制正点原子 I.MX6U 的 LED 设备。 如可以用 C 语言的读写函数读写来控制 LED的状态,或者直接使用 system()函数启动一个进程执行相关指令直接控制 LED 等。
我们介绍最简单的方法控制开发板上的LED, 就是使用Qt的操作文件的类QFile直接控制LED。因为 Linux 上一切皆文件,所有的东西都当作文件来处理。
/* 开发板的 LED 控制接口 */
file.setFileName("/sys/devices/platform/leds/leds/sys-led/brightness");
项目虽然简单,但是在嵌入式里基本都是从点亮一个 LED 里开始说起。
只有我们会操作一个 IO,剩下的基本都不会难!
3.2 开发UI程序控制LED灯
项目简介:设置一个按钮,点击即可控制 LED 状态反转(点亮或者熄灭 LED)。 项目看来很起来很简单, 实际上有些需要注意的地方,我们在改变 LED 的状态时,需要先去读取 LED的状态,防止外界(外面应用程序)将 LED 的状态改变了。 否则我们反转操作将不成立。 在C++里一般使用 get()和 set()方法来获取和设置。我们的 LED 程序里也有这种方法。所以需要写好一个让人看得懂的程序是有“方法”的。不能将程序功能写在一堆,最好是分开写,留有接口。让后面的人看懂!
3.2.1 在源文件“mainwindow.h”的代码如下
#ifndef MAINWINDOW_H
2 #define MAINWINDOW_H
3 4
#include <QMainWindow>
5 #include <QPushButton>
6 #include <QFile>
7 8
class MainWindow : public QMainWindow
9 {
10 Q_OBJECT
11
12 public:
13 MainWindow(QWidget *parent = nullptr);
14 ~MainWindow();
15
16 private:
17 /* 按钮 */
18 QPushButton *pushButton;
19
20 /* 文件 */
21 QFile file;
22
23 /* 设置 lED 的状态 */
24 void setLedState();
25
26 /* 获取 lED 的状态 */
27 bool getLedState();
28
29 private slots:
30 void pushButtonClicked();
31 };
32 #endif // MAINWINDOW_H
在头文件“mainwindow.h”里第 24 行声明一个设置 LED 状态方法, 另一个是获取状态的方法。 另外声明一个槽函数,作用是点击切换 LED 的状态。
3.2.2 在源文件“mainwindow.cpp” 的代码如下
#include "mainwindow.h"
2 #include <QDebug>
3 #include <QGuiApplication>
4 #include <QScreen>
5 #include <QRect>
6 7
MainWindow::MainWindow(QWidget *parent)
8 : QMainWindow(parent)
9 {
10 /* 获取屏幕的分辨率, Qt 官方建议使用这
11 * 种方法获取屏幕分辨率,防上多屏设备导致对应不上
12 * 注意,这是获取整个桌面系统的分辨率
13 */
14 QList <QScreen *> list_screen = QGuiApplication::screens();
15
16 /* 如果是 ARM 平台,直接设置大小为屏幕的大小 */
17 #if __arm__
18 /* 重设大小 */
19 this->resize(list_screen.at(0)->geometry().width(),
20 list_screen.at(0)->geometry().height());
21 /* 默认是出厂系统的 LED 心跳的触发方式,想要控制 LED,
22 * 需要改变 LED 的触发方式,改为 none,即无 */
23 system("echo none > /sys/class/leds/sys-led/trigger");
24 #else
25 /* 否则则设置主窗体大小为 800x480 */
26 this->resize(800, 480);
27 #endif
28
29 pushButton = new QPushButton(this);
30
31 /* 居中显示 */
32 pushButton->setMinimumSize(200, 50);
33 pushButton->setGeometry((this->width() - pushButton->width()) /2 ,
34 (this->height() - pushButton->height()) /2,
35 pushButton->width(),
36 pushButton->height()
37 );
38 /* 开发板的 LED 控制接口 */
39
file.setFileName("/sys/devices/platform/leds/leds/sys-led/brightness");
if (!file.exists())
42 /* 设置按钮的初始化文本 */
43 pushButton->setText("未获取到 LED 设备! ");
44
45 /* 获取 LED 的状态 */
46 getLedState();
47
48 /* 信号槽连接 */
49 connect(pushButton, SIGNAL(clicked()),
50 this, SLOT(pushButtonClicked()));
51 }
52
53 MainWindow::~MainWindow()
54 {
55 }
56
57 void MainWindow::setLedState()
58 {
59 /* 在设置 LED 状态时先读取 */
60 bool state = getLedState();
61
62 /* 如果文件不存在,则返回 */
63 if (!file.exists())
64 return;
65
66 if(!file.open(QIODevice::ReadWrite))
67 qDebug()<<file.errorString();
68
69 QByteArray buf[2] = {"0", "1"};
70
71 /* 写 0 或 1 */
72 if (state)
73 file.write(buf[0]);
74 else
75 file.write(buf[1]);
76
77 /* 关闭文件 */
78 file.close();
79
80 /*重新获取 LED 的状态 */
81 getLedState();
82 }
bool MainWindow::getLedState()
85 {
86 /* 如果文件不存在,则返回 */
87 if (!file.exists())
88 return false;
89
90 if(!file.open(QIODevice::ReadWrite))
91 qDebug()<<file.errorString();
92
93 QTextStream in(&file);
94
95 /* 读取文件所有数据 */
96 QString buf = in.readLine();
97
98 /* 打印出读出的值 */
99 qDebug()<<"buf: "<<buf<<endl;
100 file.close();
101 if (buf == "1") {
102 pushButton->setText("LED 点亮");
103 return true;
104 } else {
105 pushButton->setText("LED 熄灭");
106 return false;
107 }
108 }
109
110 void MainWindow::pushButtonClicked()
111 {
112 /* 设置 LED 的状态 */
113 setLedState();
114 }
第 9 行~24 行,界面初始化设置,在嵌入式里,根据实际的屏的大小,设置全屏显示。按钮居中显示。
第 23 行,因为出厂系统里配置 LED 的触发方式为心跳方式, 要想控制此 LED,需要将 LED的触发方式改为none,即是无触发方式。为了方便,编者直接使用 system()函数,用指令的方式改变 LED 的触发方式。
第 54~82 行设置 LED 的方法,写入“0”或“1”代表开和关。 写入之前先读取 LED 的状态,预防在用户其他地方有设置过 LED。
第 84 行~108 行, 获取 LED 的状态。
第 110 行~114 行设置 LED 的状态,此方法为槽函数,由点击按钮触发。
4. 程序运行效果
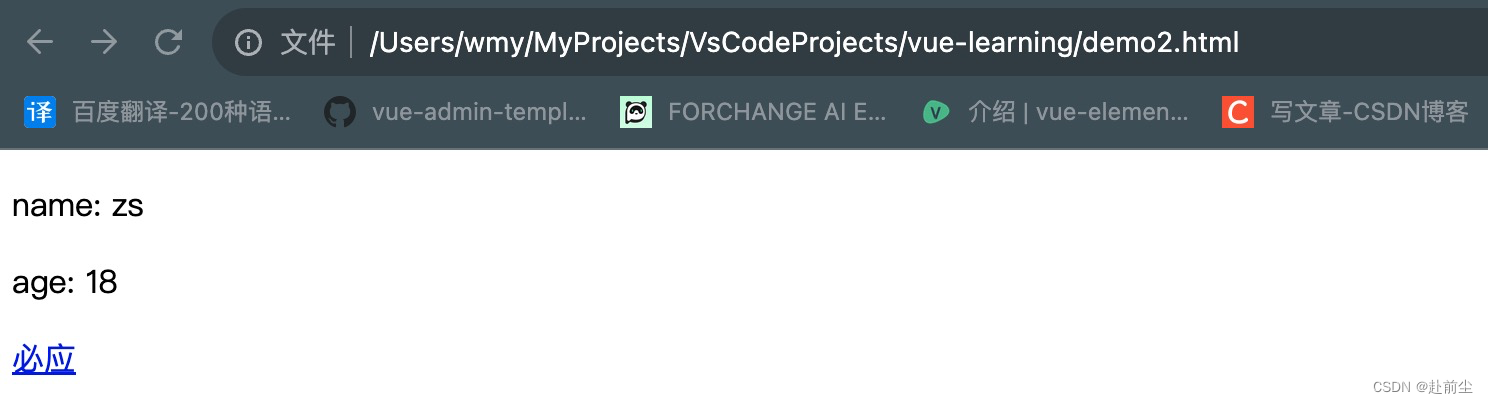
4.1 Ubuntu 上仿真界面的效果
下面为 Ubuntu 上仿真界面的效果,由于 Ubuntu 不是“开发板”,所以在读取 LED 设备时会读取失败。实际在板上运行图略。 交叉编译程序到正点原子 I.MX6U 开发板上运行即可控制LED 的状态。

4.2 板卡上运行效果
按照上一篇I.MX6U开发板交叉编译Qt项目进行交叉编译,拷贝到开发板的Linux系统中,可以看到通过UI上的按钮控制了LED灯。
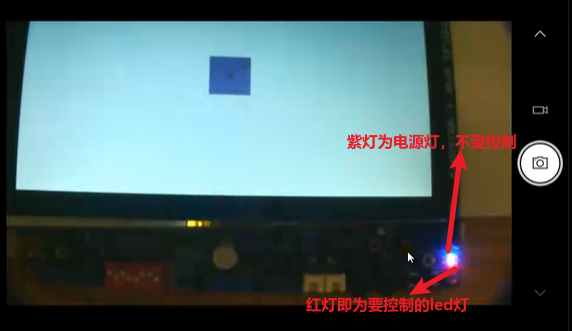
对应地址:Qt点亮I.MX6U开发板的一个LED