文章目录
- 一、基本概念
- 1.发展背景
- 2.性质
- 二、实现原理
- ①插入操作
- 1.平衡因子
- 1.1平衡因子的更新
- 1.1.1树的高度变化
- 1.1.2树的高度不变
- 2. 旋转
- 2.1左旋
- 2.2右旋
- 2.3右左双旋
- 2.4 左右双旋
- ②验证
- 1.求二叉树高度
- 2. 判断是否为AVL树
- 源码
- 总结
一、基本概念
1.发展背景
-
普通的二叉搜索树在极端情况下会退化成类似链表的形状,从而使查找的效率降低至O(N)。
-
在此基础上,苏联与以色列数学家
Adelson-Velskii 与 苏联数学家Landis,发明出了 AVL树或者说平衡二叉搜索树。


注:第一张——Adelson-Velskii(1922-2014) ,第二张——Landis(1921——1997)
2.性质
- 左右子树的高度差的绝对值不大于1
- 每个子树都是AVL树。
说明:这样做的目的就是为了严格控制平衡,以便于提高查找效率,但是控制高度差一直为0是不可能的,至于为什么不能控制成0,假设只有两个结点必然存在1的高度差。
二、实现原理
①插入操作
1.平衡因子
英文名:balance factor
- 目的:
保证左右子树的高度差的绝对值不大于1 - 大多数的实现方式:
存放的是右子树与左子树的高度差
1.1平衡因子的更新
1.1.1树的高度变化
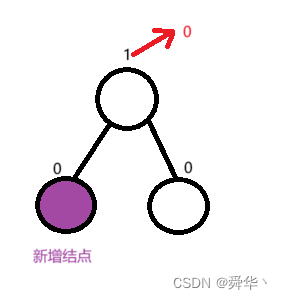
① 左边新增结点

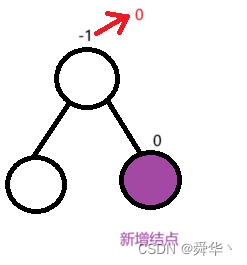
② 右边新增结点
- 总结
- 左边新增,根节点的平衡因子减1
- 右边新增,根节点的平衡因子加1
- 平衡因子从0变为1或者-1
继续分析:
两种情况树的高度增加1,也就是平衡因子从0变为1或者-1,既然高度变化了,可能会导致上面的树不平衡。
如:

此时我们需要向上更新平衡因子,再根据右边高度变化与左边高度变化,决定根的平衡因子加1还是减1。
- 推论:
由于可能会向上更新平衡因子,那么AVL树是三叉链的结构。
如图:
1.1.2树的高度不变
① 左边新增结点
② 右边新增结点
- 同理
- 左边新增,根节点的平衡因子减1
- 右边新增,根节点的平衡因子加1
- 平衡因子由1或者-1变为0
继续分析,这里的根节点的所在树的高度即——左右子树高度的最大值 + 1(根节点的高度)
左右子树的高度的最大值不变,即这颗树高度不变,即不用往上继续更新且达到平衡。
2. 旋转
-
说明:旋转就是让
不平衡的树再次平衡的手段。 -
条件:平衡因子为2或者-2,即高度差的绝对值为2。
-
补充:若平衡因子大于等于3,说明当前树就不是AVL树,需要检验之前的代码。
但是我们又得对情况进行分类讨论,因为不同情况让树再次平衡的旋转方式不同。
2.1左旋
- 说明:也就是右边高度高,需要旋转来降低右边的高度,进而达到平衡。
一步一步分析,先来个最简单的:

此时,旋转过后平衡因子全变为0,且当前树达到平衡。注意此时3结点的左结点为空!(细节)
再举一个例子:
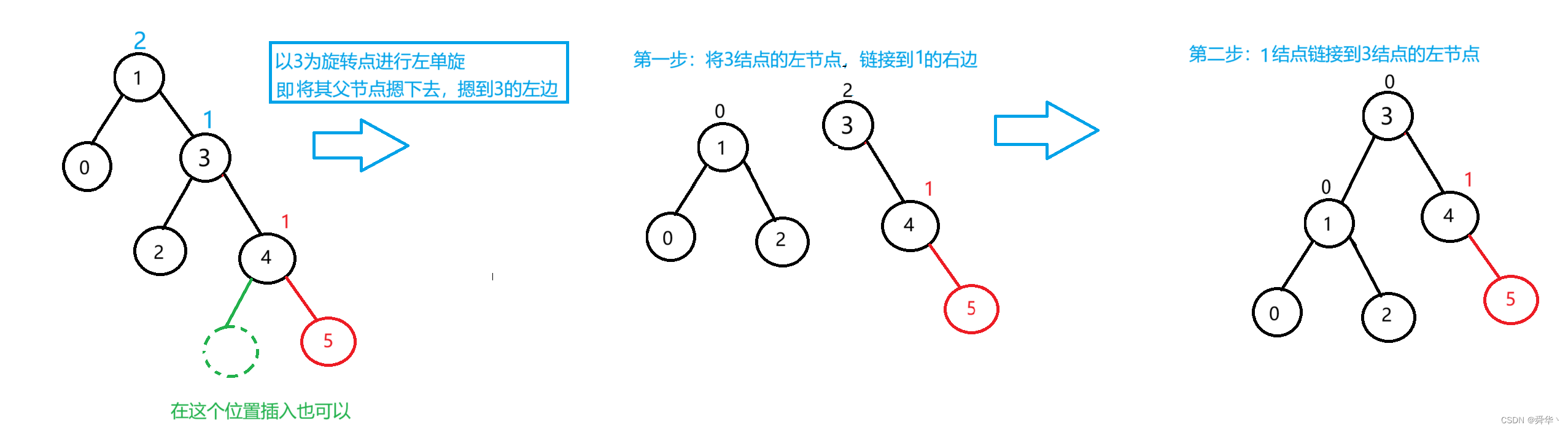
此时,旋转过后平衡因子1和3的平衡因子变为0,且当前树达到平衡,此时我们是不用管其它子树的,因为子树必然是AVL树,要不然更不到根节点就停止了。
最后来一个稍微复杂的例子:
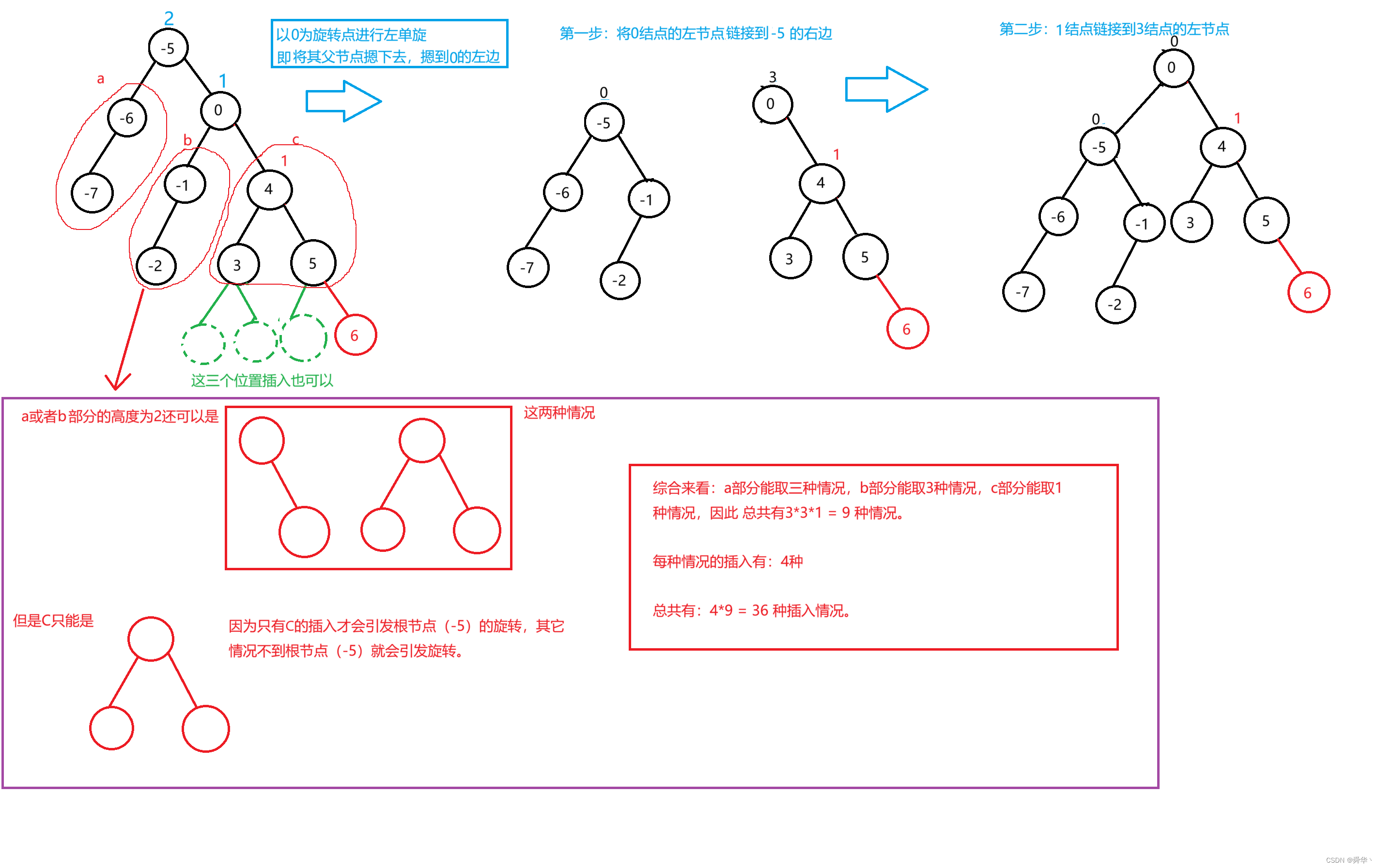
此时,旋转过后平衡因子-5和0的平衡因子变为0,且当前树达到平衡。
这是具体的图便于辅助理解,然后我们再画出所有情况的抽象图:
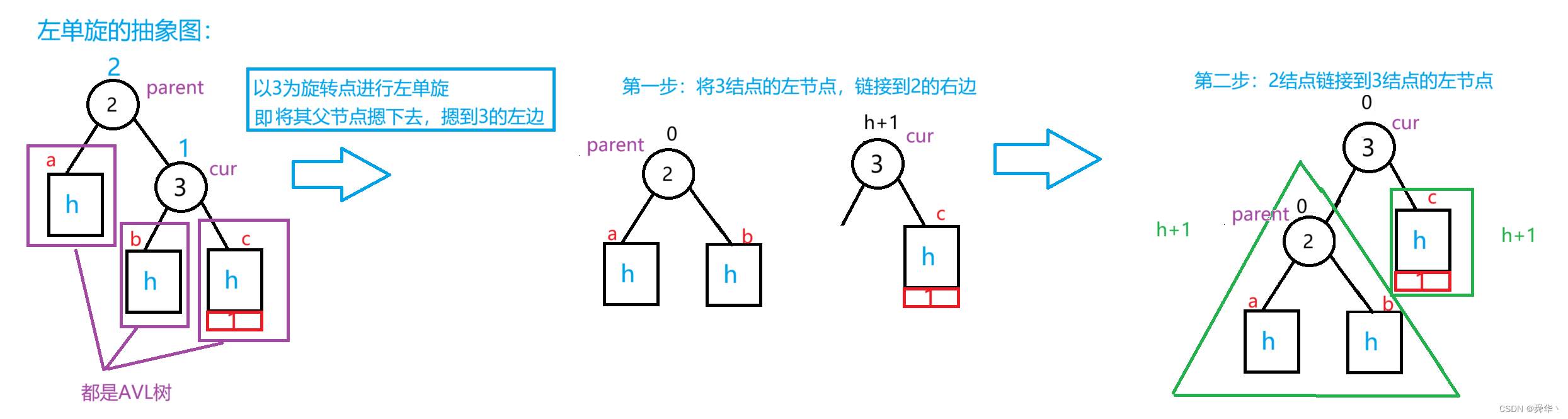
- 总结
只能在c部分上插入结点才可能会引发根节点左单旋,也就是说parent的右边为cur且新增结点在cur的右边。- 旋转过后
cur与parent的平衡因子变为0。
- 细节
- b的父节点连接parent时,需要判断b部分是否为空。
- parent的父节点连接cur时,需要保存一下parent的父节点。
- 根据parent的父节点判断是否需要修改根节点,若为空则修改,若不为空,则将cur链接到parent的父节点,同时更新parent父节点的指向。
- 实现代码
void RotateL(Node* parent)
{
//画图分析:
//操作的结点有cur,cur_left,ppnode
Node* cur = parent->_right;
Node* cur_left = cur->_left;
//将parent的右节点改为cur_left
parent->_right = cur_left;
//改变cur_left父节点的转向
//cur_left可能为空
if (cur_left != nullptr)
{
cur_left->_parent = parent;
}
//将parent链接在cur的左边
//为了更新cur的parent需要保存parent的父节点
Node* ppnode = parent->_parent;
cur->_left = parent;
parent->_parent = cur;
//ppnode可能为空
if (ppnode == nullptr)
{
//需要修改根节点
_root = cur;
cur->_parent = nullptr;
}
else
{
//改变ppnode的指向
if (ppnode->_left == parent)
{
ppnode->_left = cur;
}
else
{
ppnode->_right = cur;
}
cur->_parent = ppnode;
}
//更新平衡因子
cur->_bf = parent->_bf = 0;
}
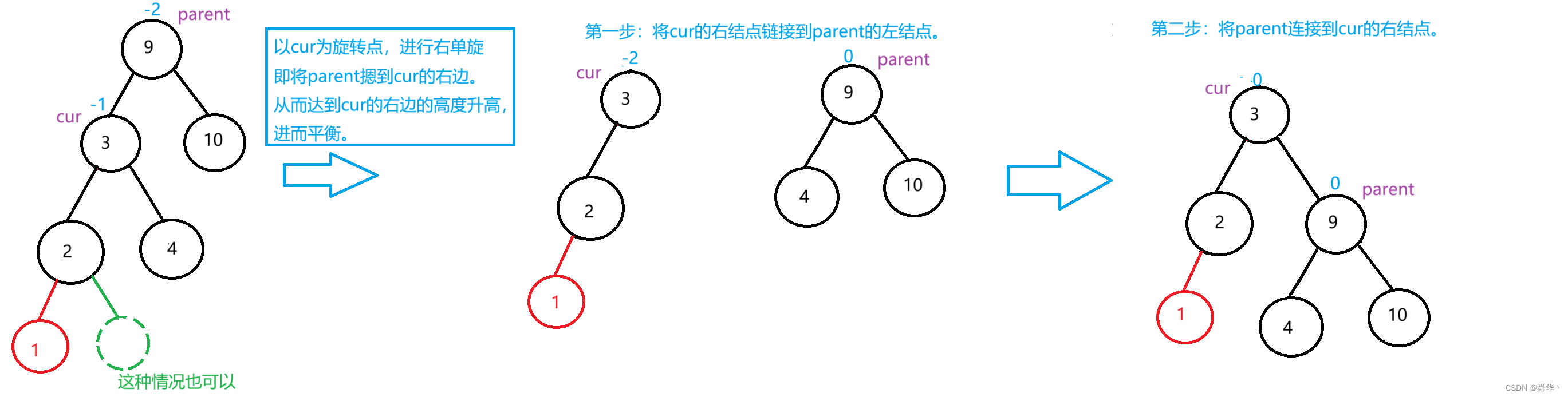
2.2右旋
说明:也就是左边高度高,需要旋转来降低右边的高度,进而达到平衡。
跟左旋的分析方式一样。
先来个简单的感受一下:

此时,旋转过后平衡因子parent和cur的平衡因子变为0,且当前树达到平衡。
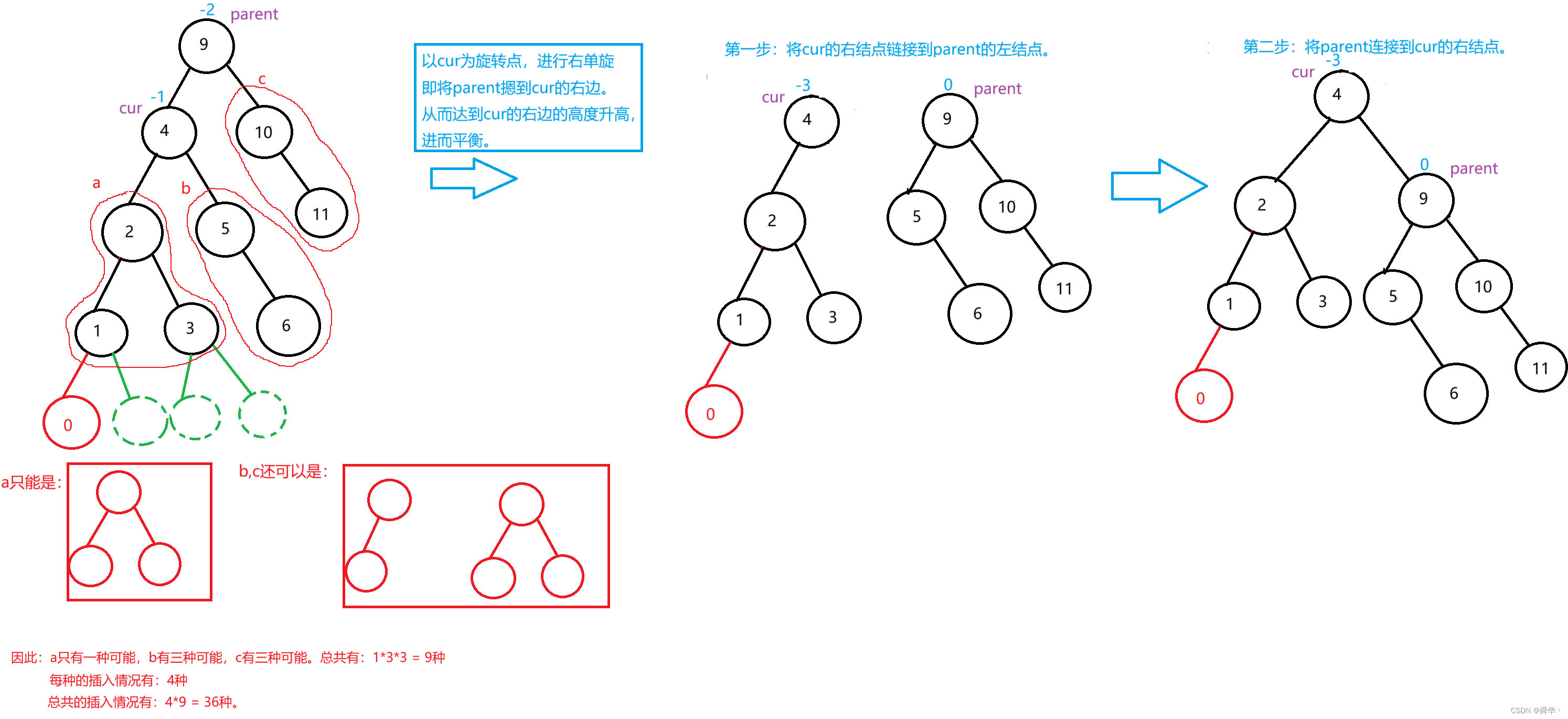
再举一个例子:
最后来一个稍微复杂的例子:
画出所有情况的抽象图:
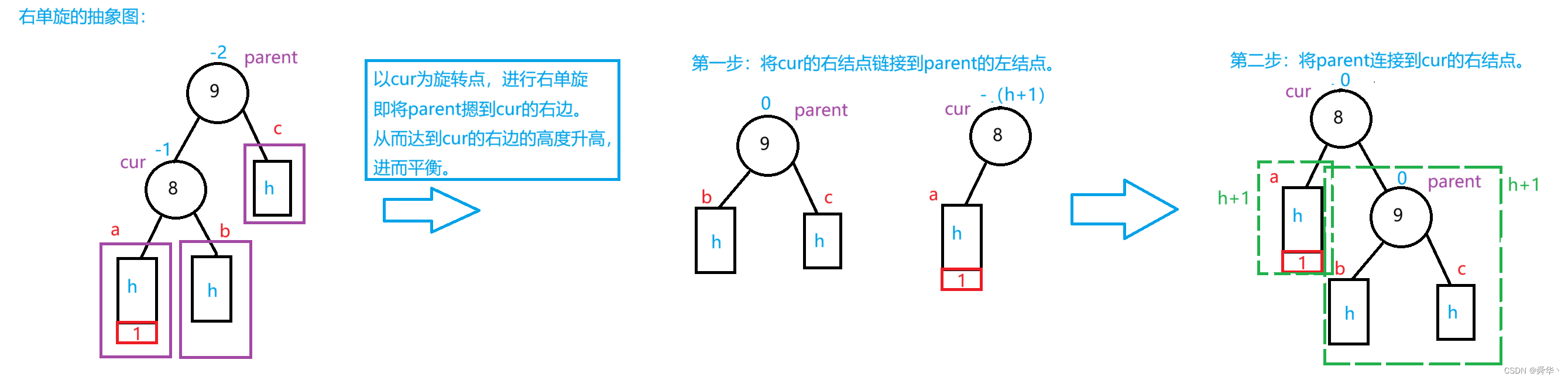
- 总结
只能在a部分上插入结点才可能会引发根节点右单旋,也就是说parent与cur与高度变化的c树的根节点在同一个方向且在parent的左- 旋转过后
cur与parent的平衡因子变为0。
- 细节——同左旋
- b的父节点连接parent时,需要判断b部分是否为空。
- parent的父节点连接cur时,需要保存一下parent的父节点。
- 根据parent的父节点判断是否需要修改根节点,若为空则修改,若不为空,则将cur链接到parent的父节点,同时更新parent父节点的指向。
- 实现代码:
void RotateR(Node* parent)
{
//操作的结点
Node* cur = parent->_left;
Node* cur_right = cur->_right;
//第一步:将cur_right链接到parent的left
parent->_left = cur_right;
//更改cur_right的父节点
//注意:cur_right可能为空
if (cur_right != nullptr)
{
cur_right->_parent = parent;
}
//第二步:将parent链接到cur的右结点。
//先保存一下parent的父节点
Node* ppnode = parent->_parent;
cur->_right = parent;
parent->_parent = cur;
//ppnode为空说明需要修改根节点
if (ppnode == nullptr)
{
_root = cur;
cur->_parent = nullptr;
}
else
{
if (ppnode->_left == parent)
{
ppnode->_left = cur;
}
else
{
ppnode->_right = cur;
}
cur->_parent = ppnode;
}
//更新平衡因子
cur->_bf = parent->_bf = 0;
}
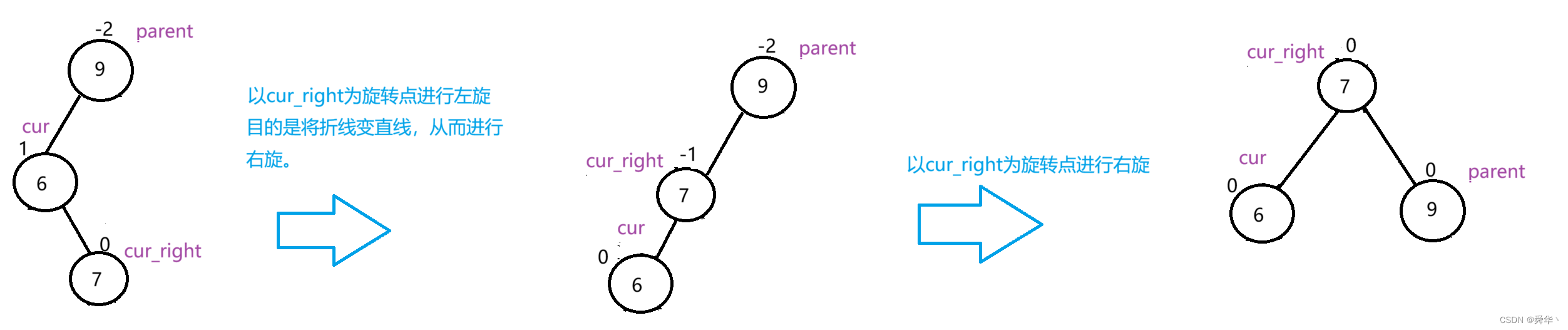
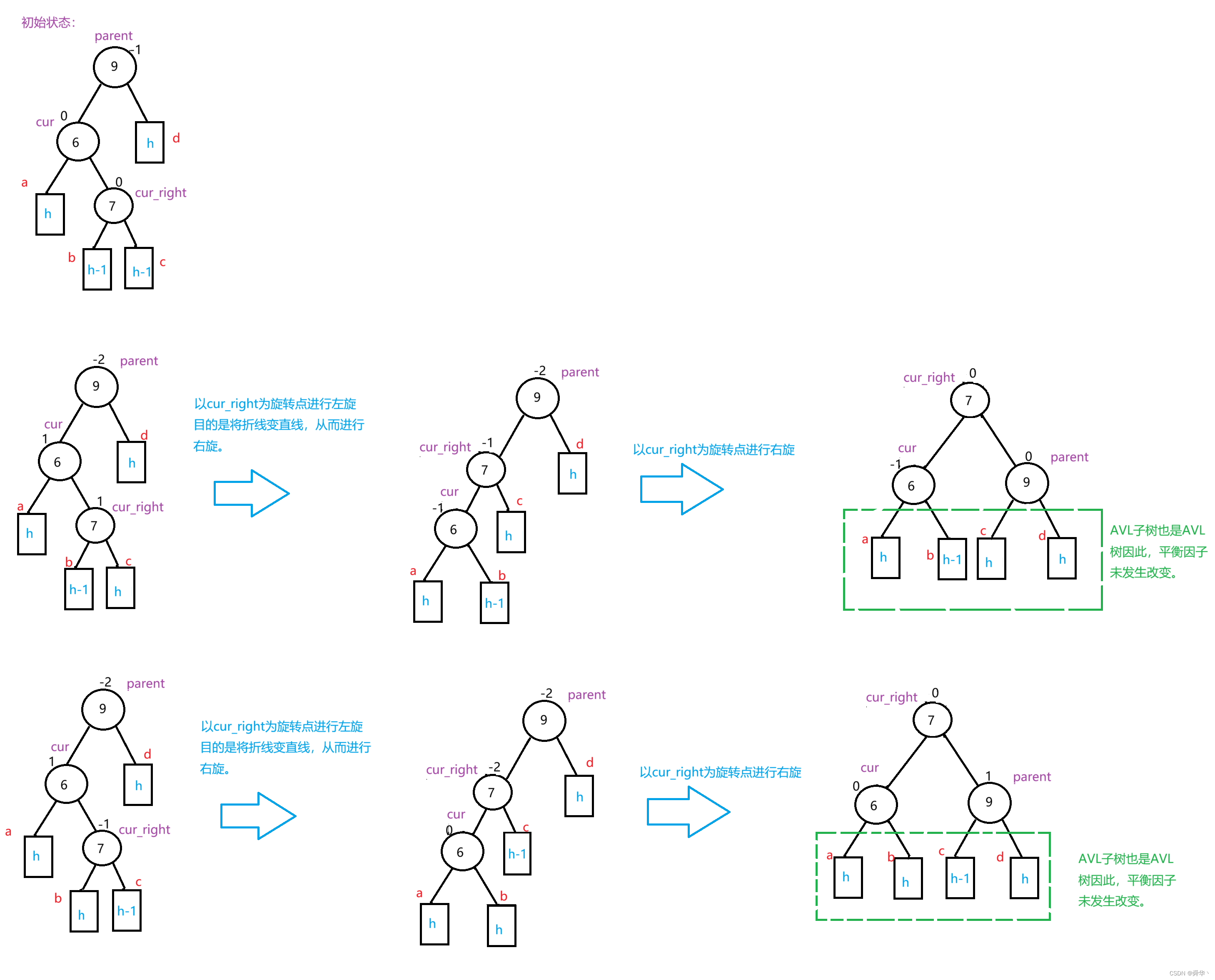
2.3右左双旋
- 可以简单理解为,需要进行处理的左旋。
说明:单旋无法解决问题,原因是发生了拐弯,需要用右旋讲折线变为直线,再进行左旋。
因为情况有点多我们就来个简单的,直接化抽象图,看结论比较容易理解。
先来个简单的:
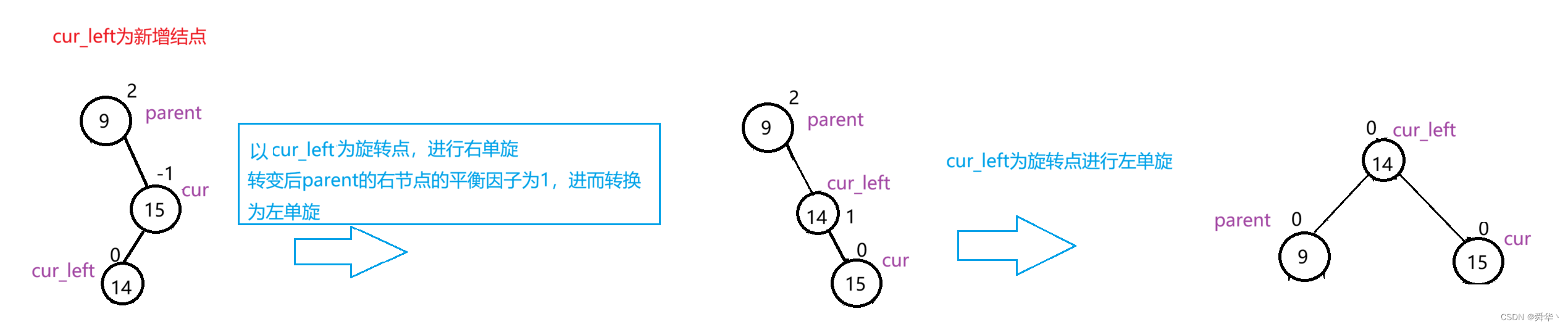
先右旋之后折线变成了直线,变成了左旋的形状,再进行左旋,最后的cur与cur_left与parent的平衡因子变成了0,最终cur_left变成了根节点。
再化抽象图:
初始状态
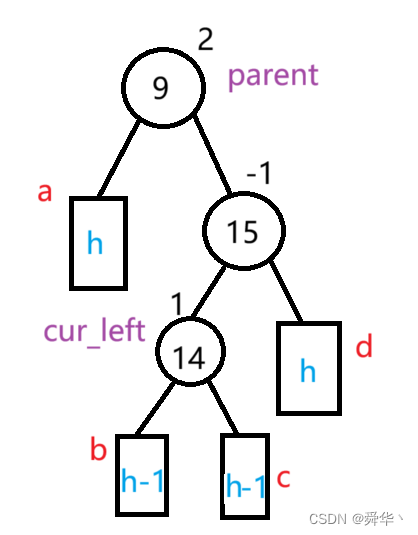
还是一样,不过得分两种情况进行讨论:
- 新增结点在c树上,会导致parent的平衡因子变为-1,cur的平衡因子变为0。
- 新增结点在b树上,会导致parent的平衡因子变为0,cur的平衡因子变为1
- 不管新增结点在谁上,cur_left的平衡因子都为0。
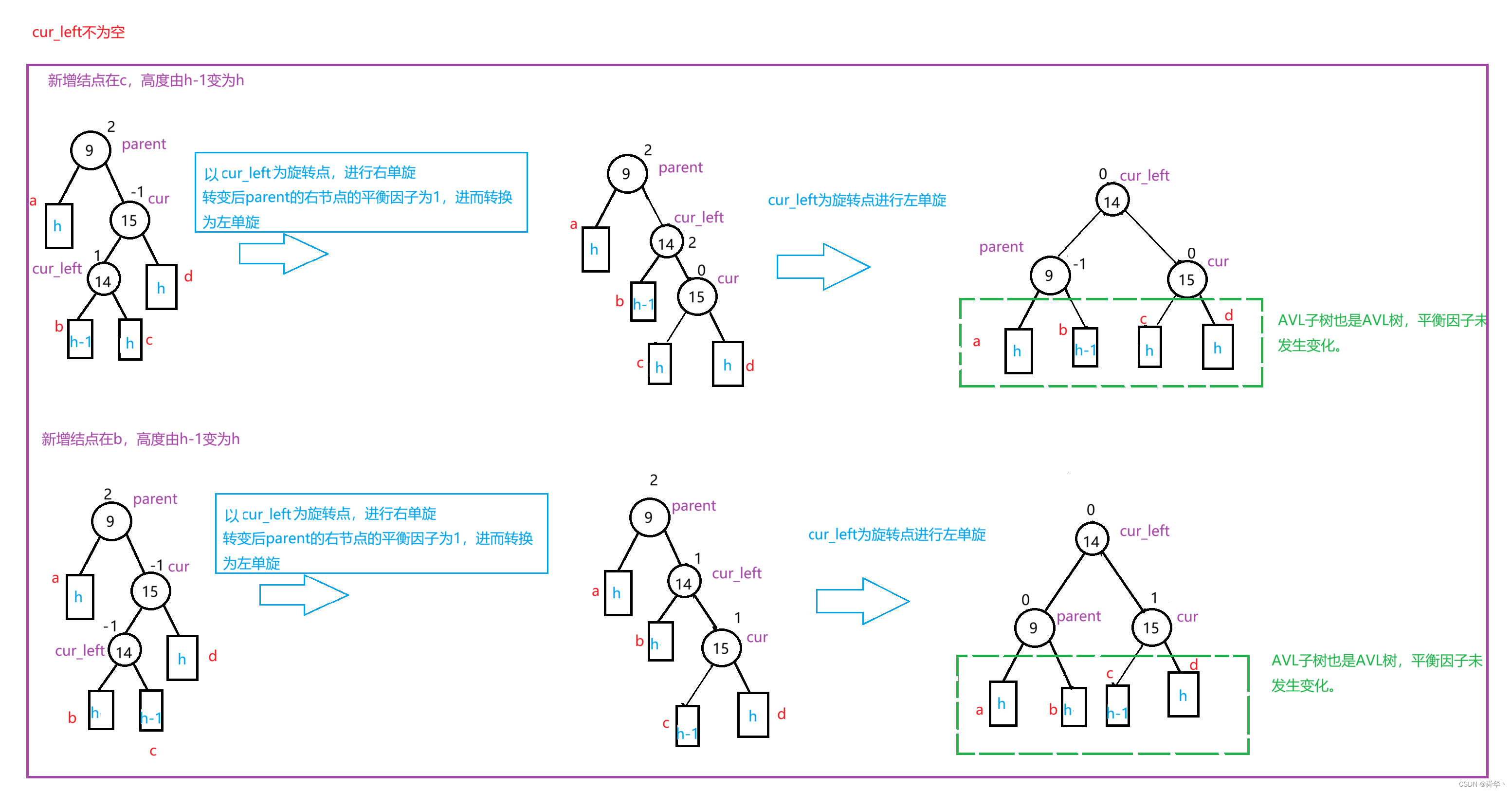
-
看图分析,其实不看新增结点在谁身上,两种最终的旋转的结果是一样的,那我们其实只需先不看新增结点再画图,根据最终的结果再把新增结点添上,其实会更加直观。
-
总结
- 新增结点在c树上,会导致parent的平衡因子变为-1,cur的平衡因子变为0。
- 新增结点在b树上,会导致parent的平衡因子变为0,cur的平衡因子变为1。
- cur_left为新增结点,parent与cur的结点全为0。
- 实现代码:
void RotateRL(Node* parent)
{
Node* cur = parent->_right;
Node* cur_left = cur->_left;
//CL——CurLeft
int CL_bf = cur_left->_bf;
RotateR(cur);
RotateL(parent);
//更新平衡因子
if (CL_bf == 0)
{
cur->_bf = parent->_bf = cur_left->_bf = 0;
//虽然没必要,但是起到了解耦的作用。
}
else if (CL_bf == 1)
{
parent->_bf = -1;
cur->_bf = cur_left->_bf = 0;
}
else if(CL_bf == -1)
{
cur->_bf = 1;
parent->_bf = cur_left->_bf = 0;
}
else
{
cout << __LINE__ << ":" << endl;
perror("平衡因子有误");
exit(-1);
}
}
2.4 左右双旋
- 可以理解为,需要进行处理的右旋。
说明:单旋无法解决问题,原因是发生了拐弯,需要用左旋讲折线变为直线,再进行右旋。
分析方法跟右左双旋一样。
先来个简单的:
先左旋之后折线变成了直线,变成了右旋的形状,再进行右旋,最后的cur与cur_left与parent的平衡因子变成了0,最终cur_left变成了根节点。
再来个抽象的:
还是一样,不过得分两种情况进行讨论:
- 新增结点在c树上,会导致cur的平衡因子变为-1,parent的平衡因子变为0。
- 新增结点在b树上,会导致cur的平衡因子变为0,parent的平衡因子变为1
- 不管新增结点在谁上,cur_right的平衡因子都为0。
- 总结
- cur_right平衡因子为1,说明新增结点在b树上,会导致cur的平衡因子变为0,parent的平衡因子变为1。
- cur_right的平衡因子为-1,新增结点在c树上,会导致cur的平衡因子变为-1,parent的平衡因子变为0。
- cur_right的平衡因子为0,cur与parent的平衡因子都变为0。
- 不管新增结点在谁上,cur_right的平衡因子都为0。
- 代码实现
void RotateLR(Node* parent)
{
Node* cur = parent->_left;
Node* cur_right = cur->_right;
int CR_bf = cur_right->_bf;
RotateL(cur);
RotateR(parent);
if (CR_bf == 0)
{
parent->_bf = cur->_bf = cur_right->_bf = 0;
}
else if(CR_bf == 1)
{
cur->_bf = -1;
parent->_bf = cur_right->_bf = 0;
}
else if (CR_bf == -1)
{
parent->_bf = 1;
cur->_bf = cur_right->_bf = 0;
}
else
{
cout << __LINE__ << ":" << endl;
perror("平衡因子有误");
exit(-1);
}
}
②验证
说明:
- 根据定义验证每颗子树的高度差
- 需要判断当前的右子树的高度差是否等于平衡因子
直接根据平衡因子进行判断,有点监守自盗的感觉,你能保证自己更新的平衡因子就是正确的么?我都不敢保证。
1.求二叉树高度
- 后序遍历
size_t Height(Node* root)
{
if (root == nullptr)
{
return 0;
}
int LHeight = Height(root->_left);
int RHeight = Height(root->_right);
return max(LHeight, RHeight) + 1;
}
2. 判断是否为AVL树
bool _IsAVLTree(Node* root)
{
if (root == nullptr)
{
return true;
}
int RHeight = Height(root->_right);
int LHeight = Height(root->_left);
if (abs(RHeight - LHeight) > 1 || root->_bf != RHeight - LHeight)
{
return false;
}
return _IsAVLTree(root->_left) && _IsAVLTree(root->_right);
}
优化一下:
bool IsAVLTree()
{
bool is_AVL = true;
_IsAVLTree(_root, is_AVL);
return is_AVL;
}
int _IsAVLTree(Node* root,bool& is_AVL)
{
if (root == nullptr)
{
return 0;
}
int RHeight = _IsAVLTree(root->_right, is_AVL);
int LHeight = _IsAVLTree(root->_left, is_AVL);
if (abs(RHeight - LHeight) > 1 || root->_bf != RHeight - LHeight)
{
is_AVL = false;
}
return max(RHeight, LHeight) + 1;
}
源码
#include<iostream>
#include<assert.h>
using namespace std;
namespace MY_STL
{
template<class Key,class Val>
struct AVLTreeNode
{
typedef AVLTreeNode<Key, Val> Node;
AVLTreeNode(const pair<Key,Val>& key = pair<Key,Val>())
:_key(key.first)
,_val(key.second)
,_left(nullptr)
,_right(nullptr)
,_parent(nullptr)
,_bf(0)
{}
Key _key;
Val _val;
//三叉链的结构
Node* _left;
Node* _right;
Node* _parent;
int _bf;
};
template<class Key, class Val>
class AVLTree
{
typedef AVLTreeNode<Key, Val> Node;
public:
AVLTree()
{}
bool insert(const pair<Key,Val>& val)
{
//第一步:插入操作
//如果根节点为空
if (_root == nullptr)
{
_root = new Node(val);
return true;
}
else
{
Node* cur = _root,*parent = _root;
while (cur)
{
if (cur->_key > val.first)
{
parent = cur;
cur = cur->_left;
}
else if(cur->_key < val.first)
{
parent = cur;
cur = cur->_right;
}
else
{
return false;
}
}
cur = new Node(val);
if (parent->_key > val.first)
{
parent->_left = cur;
}
else
{
parent->_right = cur;
}
//更新新增结点的_parent
cur->_parent = parent;
//第二步:更新平衡因子
//平衡因子:
//1. 定义为右子树的高度减去左子树的高度
//2. 合法范围为{-1,0,1}
//3. 新增结点在左,父节点的平衡因子减1
//4. 新增结点在右,父节点的平衡因子加1
//5. 当父节点的平衡因子变为0——由-1变0或者1变0时,此时AVL树的高度不变
//6. 当父节点的平衡因子变为1或者-1,AVL子树的高度变化,继续向上变化。
//7. 当父节点的平衡因子变为2或者-2时,此时需要旋转,进行平衡
//8. 当父节点为根节点时,此时需要结束循环。
while (cur != _root)
{
//更新平衡因子
if (parent->_left == cur)
{
//左减1
(parent->_bf)--;
}
else
{
//右加1
(parent->_bf)++;
}
//判断平衡因子
if (parent->_bf == 0)
{
break;
}
else if (parent->_bf == 1 || parent->_bf == -1)
{
cur = parent;
parent = cur->_parent;
}
else if (parent->_bf == 2 || parent->_bf == -2)
{
//对旋转进行分类讨论
//if (parent->_bf == 2 && cur->_bf == 1)
//{
// //左单旋
// RotateL(parent);
//}
//else if (parent->_bf == -2 && cur->_bf = -1)
//{
// //右单旋
// RotateR(parent);
//}
//else if (parent->_bf == 2 && cur->_bf == -1)
//{
// RotateRL(parent);
//}
//else if (parent->_bf == -2 && cur->_bf == 1)
//{
// RotateLR(parent);
//}
if (parent->_bf == 2)
{
//左单旋
if (cur->_bf == 1)
{
RotateL(parent);
}
else
{
RotateRL(parent);
}
}
else
{
//右单旋
if (cur->_bf == -1)
{
RotateR(parent);
}
else
{
RotateLR(parent);
}
}
//旋转完成,树达到平衡
break;
}
}
return true;
}
}
//根据定义进行判断
bool IsAVLTree()
{
bool is_AVL = true;
_IsAVLTree(_root, is_AVL);
return is_AVL;
//return _IsAVLTree(_root);
}
void Print()
{
_InOrder(_root);
cout << endl;
}
//根据平衡因子进行判断
//bool IsAVLTree()
//{
// return _IsAVLTree(_root);
//}
private:
void _InOrder(Node* root)
{
if (root == nullptr)
{
return;
}
_InOrder(root->_left);
cout << root->_key << " ";
_InOrder(root->_right);
}
//bool _IsAVLTree(Node* root)
//{
// if (root == nullptr)
// return true;
// if (root->_bf >= 2 || root->_bf <= -2)
// {
// return false;
// }
// else
// {
// return _IsAVLTree(root->_left) && _IsAVLTree(root->_right);
// }
//}
//bool IsAVLTree()
//{
// bool is_AVL = true;
// _IsAVLTree(_root, is_AVL);
// return is_AVL;
//}
size_t Height(Node* root)
{
if (root == nullptr)
{
return 0;
}
int LHeight = Height(root->_left);
int RHeight = Height(root->_right);
return max(LHeight, RHeight) + 1;
}
int _IsAVLTree(Node* root,bool& is_AVL)
{
if (root == nullptr)
{
return 0;
}
int RHeight = _IsAVLTree(root->_right, is_AVL);
int LHeight = _IsAVLTree(root->_left, is_AVL);
if (abs(RHeight - LHeight) > 1 || root->_bf != RHeight - LHeight)
{
is_AVL = false;
}
return max(RHeight, LHeight) + 1;
}
bool _IsAVLTree(Node* root)
{
if (root == nullptr)
{
return true;
}
int RHeight = Height(root->_right);
int LHeight = Height(root->_left);
if (abs(RHeight - LHeight) > 1 || root->_bf != RHeight - LHeight)
{
return false;
}
return _IsAVLTree(root->_left) && _IsAVLTree(root->_right);
}
void RotateLR(Node* parent)
{
Node* cur = parent->_left;
Node* cur_right = cur->_right;
int CR_bf = cur_right->_bf;
RotateL(cur);
RotateR(parent);
if (CR_bf == 0)
{
parent->_bf = cur->_bf = cur_right->_bf = 0;
}
else if(CR_bf == 1)
{
cur->_bf = -1;
parent->_bf = cur_right->_bf = 0;
}
else if (CR_bf == -1)
{
parent->_bf = 1;
cur->_bf = cur_right->_bf = 0;
}
else
{
cout << __LINE__ << ":" << endl;
perror("平衡因子有误");
exit(-1);
}
}
void RotateRL(Node* parent)
{
Node* cur = parent->_right;
Node* cur_left = cur->_left;
//CL——CurLeft
int CL_bf = cur_left->_bf;
RotateR(cur);
RotateL(parent);
if (CL_bf == 0)
{
cur->_bf = parent->_bf = cur_left->_bf = 0;
}
else if (CL_bf == 1)
{
parent->_bf = -1;
cur->_bf = cur_left->_bf = 0;
}
else if(CL_bf == -1)
{
cur->_bf = 1;
parent->_bf = cur_left->_bf = 0;
}
else
{
cout << __LINE__ << ":" << endl;
perror("平衡因子有误");
exit(-1);
}
}
void RotateL(Node* parent)
{
//画图分析:
//操作的结点有cur,cur_left,ppnode
Node* cur = parent->_right;
Node* cur_left = cur->_left;
//将parent的右节点改为cur_left
parent->_right = cur_left;
//改变cur_left父节点的转向
//cur_left可能为空
if (cur_left != nullptr)
{
cur_left->_parent = parent;
}
//将parent链接在cur的左边
//为了更新cur的parent需要保存parent的父节点
Node* ppnode = parent->_parent;
cur->_left = parent;
parent->_parent = cur;
//ppnode可能为空
if (ppnode == nullptr)
{
//需要修改根节点
_root = cur;
cur->_parent = nullptr;
}
else
{
//改变ppnode的指向
if (ppnode->_left == parent)
{
ppnode->_left = cur;
}
else
{
ppnode->_right = cur;
}
cur->_parent = ppnode;
}
//更新平衡因子
cur->_bf = parent->_bf = 0;
}
void RotateR(Node* parent)
{
//操作的结点
Node* cur = parent->_left;
Node* cur_right = cur->_right;
//第一步:将cur_right链接到parent的left
parent->_left = cur_right;
//更改cur_right的父节点
//注意:cur_right可能为空
if (cur_right != nullptr)
{
cur_right->_parent = parent;
}
//第二步:将parent链接到cur的右结点。
//先保存一下parent的父节点
Node* ppnode = parent->_parent;
cur->_right = parent;
parent->_parent = cur;
//ppnode为空说明需要修改根节点
if (ppnode == nullptr)
{
_root = cur;
cur->_parent = nullptr;
}
else
{
if (ppnode->_left == parent)
{
ppnode->_left = cur;
}
else
{
ppnode->_right = cur;
}
cur->_parent = ppnode;
}
//更新平衡因子
cur->_bf = parent->_bf = 0;
}
Node* _root = nullptr;
};
};
总结
AVL树还有删除操作,等博主有空再补充,对于AVL树一般来说只需要弄懂一种单旋,一种双旋,再加一些细写处理,代码是不难的,难就难在了分类讨论+画图上。今天的分享就到这里了,如果感觉有所帮助,不妨点个赞鼓励一下吧!