每日一个简单的驱动,日久方长,对Linux驱动就越来越熟悉,也越来容易学会写驱动程序。今日进行设备树下的platform设备驱动。
前面一篇我们讲解了传统的、未采用设备树的 platform 设备和驱动编写方法。最新的 Linux 内核已经支持了设备树,因此在设备树下如何编写 platform驱动就显得尤为重要,本章我们就来学习一下如何在设备树下编写 platform 驱动。
一、设备树下的 platform 驱动简介
platform 驱动框架分为总线、设备和驱动,其中总线不需要我们这些驱动程序员去管理,这个是 Linux 内核提供的,我们在编写驱动的时候只要关注于设备和驱动的具体实现即可。
在没有设备树的 Linux 内核下,我们需要分别编写并注册 platform_device 和 platform_driver,分别代表设备和驱动。
在使用设备树的时候,设备的描述被放到了设备树中,因此 platform_device 就不需要我们去编写了,我们只需要实现 platform_driver 即可。
在编写基于设备树的 platform 驱动的时候我们需要注意以下几点:
-
1、在设备树中创建设备节点
毫无疑问,肯定要先在设备树中创建设备节点来描述设备信息,重点是要设置好 compatible属性的值,因为 platform 总线需要通过设备节点的 compatible 属性值来匹配驱动!这点要切记。
-
2、编写 platform 驱动的时候要注意兼容属性
在使用设备树的时候 platform 驱动会通过 of_match_table 来保存兼容性值,也就是表明此驱动兼容哪些设备。所以, of_match_table 将会尤为重要
-
3、编写 platform 驱动
基于设备树的 platform 驱动和上一章无设备树的 platform 驱动基本一样,都是当驱动和设备匹配成功以后就会执行 probe 函数。我们需要在 probe 函数里面执行字符设备驱动那一套,当注销驱动模块的时候 remove 函数就会执行,都是大同小异的。
二、修改设备树文件
修改设备树文件,加上我们需要的设备信息,本章我们就使用到一个 LED 灯。
2.1 添加 LED 设备节点
在根节点“/”下创建 LED 灯节点,节点名为“gpioled”,节点内容如下:
gpioled {
#address-cells = <1>;
#size-cells = <1>;
compatible = "imx6ull-gpioled";
pinctrl-name = "default";
pinctrl-0 = <&pinctrl_led>;
led-gpio = <&gpio1 3 GPIO_ACTIVE_LOW>;
status = "okay";
};
2.2 添加 pinctrl 节点
I.MX6U-ALPHA开发板上的 LED 灯使用了 GPIO1_IO03 这个 PIN,打开 imx6ul-14x14-evk.dtsi ,在 iomuxc 节点的 imx6ul-evk 子节点下创建一个名为“pinctrl_led”的子节点,节点内容如下所示:
pinctrl_led: ledgrp {
fsl,pins = <
MX6UL_PAD_GPIO1_IO03__GPIO1_IO03 0x10B0 /* LED0 */
>;
};
2.3 检查 PIN 是否被其他外设使用
三、platform 驱动程序编写
新建名为 dtsplatform_driver.c 的驱动文件,在 dtsplatform_driver.c 中输入如下所示内容:
/***********************************************************
* Copyright © toto Co., Ltd. 1998-2029. All rights reserved.
* Description:
* Version: 1.0
* Autor: toto
* Date: Do not edit
* LastEditors: Seven
* LastEditTime: Do not edit
***********************************************************/
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/module.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of_gpio.h>
#include <linux/semaphore.h>
#include <linux/irq.h>
#include <linux/fcntl.h>
#include <linux/fs.h>
#include <linux/platform_device.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#define LEDDEV_CNT 1 /* 设备号数量 */
#define LEDDEV_NAME "dts_platform_led" /* 设备名字 */
#define LED_ON 1
#define LED_OFF 0
/* led_dev 设备结构体 */
struct led_dev {
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev */
struct class *class; /* 类 */
struct device *device; /* 设备 */
int major; /* 主设备号 */
struct device_node *node; /* 设备节点 */
int led_gpio; /* led gpio号 */
};
struct led_dev leddev; /* led 设备 */
/*
* @Brief led 打开、关闭接口
* @Param sta:1打开,0关闭
* @Note NOne
* @RetVal NOne
*/
void led_switch(u8 sta)
{
if (sta == LED_ON) {
gpio_set_value(leddev.led_gpio, 0);
} else if (sta == LED_OFF) {
gpio_set_value(leddev.led_gpio, 1);
}
}
/*
* @Brief 打开设备
* @Param inode:传递给驱动的inode
* @Param filp:设备文件
* @Note NOne
* @RetVal NOne
*/
static int led_open(struct inode *inode, struct file *filp)
{
/* 设置私有数据 */
filp->private_data = &leddev;
return 0;
}
/*
* @Brief 向设备写数据
* @Param filp:设备文件
* @Param buf:要写入设备的数据
* @Param cnt:要写入的数据长度
* @Param offt:相对于文件首地址的偏移
* @Note NOne
* @RetVal 写入的字节数,如果为负值,表示写入失败
*/
static ssize_t led_write(struct file *filp, const char __user *buf,
size_t cnt, loff_t *offt)
{
int ret;
unsigned char databuf[1];
unsigned char ledstat;
ret = copy_from_user(databuf, buf, cnt);
if (ret < 0) {
return -EFAULT;
}
ledstat = databuf[0];
led_switch(ledstat);
return 0;
}
/* 设备操作函数 */
static struct file_operations led_fops = {
.owner = THIS_MODULE,
.open = led_open,
.write = led_write,
};
/*
* @Brief
* @Param None
* @Note NOne
* @RetVal NOne
*/
static int led_probe(struct platform_device *dev)
{
printk(KERN_INFO "led driver and device has matched\n");
/* 注册字符设备驱动 */
/* 1.创建设备号 */
if (leddev.major) {
leddev.devid = MKDEV(leddev.major, 0);
register_chrdev_region(leddev.devid, LEDDEV_CNT, LEDDEV_NAME);
} else {
alloc_chrdev_region(&leddev.devid, 0, LEDDEV_CNT, LEDDEV_NAME);
leddev.major = MAJOR(leddev.devid);
}
/* 2.注册设备 */
cdev_init(&leddev.cdev, &led_fops);
cdev_add(&leddev.cdev, leddev.devid, LEDDEV_CNT);
/* 3.创建类 */
leddev.class = class_create(THIS_MODULE, LEDDEV_NAME);
if (IS_ERR(leddev.class)) {
return PTR_ERR(leddev.class);
}
/* 4.创建设备 */
leddev.device = device_create(leddev.class, NULL, leddev.devid,
NULL, LEDDEV_NAME);
if (IS_ERR(leddev.device)) {
return PTR_ERR(leddev.device);
}
/* 5.初始化IO */
leddev.node = of_find_node_by_path("/gpioled");
if (leddev.node == NULL) {
printk("gpioled node not found\n");
return -EINVAL;
}
leddev.led_gpio = of_get_named_gpio(leddev.node, "led-gpio", 0);
if (leddev.led_gpio < 0) {
printk("can't get led-gpio\n");
return -EINVAL;
}
gpio_request(leddev.led_gpio, "my_led");
/* 设置输出模式,默认高电平 */
gpio_direction_output(leddev.led_gpio, 1);
return 0;
}
/*
* @Brief 移除 platform 驱动函数
* @Param dev:platform设备
* @Note NOne
* @RetVal NOne
*/
static int led_remove(struct platform_device *dev)
{
gpio_set_value(leddev.led_gpio, 1);
cdev_del(&leddev.cdev);
unregister_chrdev_region(leddev.devid, LEDDEV_CNT);
device_destroy(leddev.class, leddev.devid);
class_destroy(leddev.class);
return 0;
}
/* 匹配列表 */
static const struct of_device_id led_of_match[] = {
{ .compatible = "imx6ull-gpioled"},
{ /* sentinel */}
};
/* platform 驱动结构体 */
static struct platform_driver led_driver = {
.driver = {
.name = "imx6ull-led", /* 驱动名字,用于和设备匹配 */
.of_match_table = led_of_match, /* 设备树匹配表 */
},
.probe = led_probe,
.remove = led_remove,
};
/*
* @Brief 驱动模块加载函数
* @Param None
* @Note NOne
* @RetVal NOne
*/
static int __init leddriver_init(void)
{
return platform_driver_register(&led_driver);
}
/*
* @Brief 驱动模块卸载函数
* @Param None
* @Note NOne
* @RetVal NOne
*/
static void __exit leddriver_exit(void)
{
platform_driver_unregister(&led_driver);
}
module_init(leddriver_init);
module_exit(leddriver_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("toto");
-
第 33~112 行,传统的字符设备驱动,没什么要说的。
-
第 120~164 行, platform 驱动的 probe 函数,当设备树中的设备节点与驱动之间匹配成功以后此函数就会执行,原来在驱动加载函数里面做的工作现在全部放到 probe 函数里面完成。
-
第 171~180 行, remobe 函数,当卸载 platform 驱动的时候此函数就会执行。在此函数里面释放内存、注销字符设备等,也就是将原来驱动卸载函数里面的工作全部都放到 remove 函数中完成。
-
第 183~186 行,匹配表,描述了此驱动都和什么样的设备匹配,
-
第 184 行添加了一条值为"atkalpha-gpioled"的 compatible 属性值,当设备树中某个设备节点的 compatible 属性值也为“atkalpha-gpioled”的时候就会与此驱动匹配。
-
第 189~196 行,platform_driver 驱动结构体, 191 行设置这个 platform 驱动的名字为“imx6ulled”,因此,当驱动加载成功以后就会在/sys/bus/platform/drivers/目录下存在一个名为“imx6uled”的文件。
-
第 192 行设置 of_match_table 为上面的 led_of_match。
-
第 203~206 行,驱动模块加载函数,在此函数里面通过 platform_driver_register 向 Linux 内核注册 led_driver 驱动。
-
第 213~216 行,驱动模块卸载函数,在此函数里面通过 platform_driver_unregister 从 Linux内核卸载 led_driver 驱动。
四、测试 APP 编写
新建名为 dtsplatform_app.c 的测试程序文件,在 dtsplatform_app.c 中输入如下所示内容:
/***********************************************************
* Copyright © toto Co., Ltd. 1998-2029. All rights reserved.
* Description:
* Version: 1.0
* Autor: toto
* Date: Do not edit
* LastEditors: Seven
* LastEditTime: Do not edit
***********************************************************/
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#define LEDON 1
#define LEDOFF 0
/*
* @Brief
* @Param None
* @Note NOne
* @RetVal NOne
*/
int main(int argc, char *argv[])
{
int fd, retval;
char *filename;
unsigned char databuf[1];
if (argc != 3) {
printf("Error argc par cnt\n");
return -1;
}
filename = argv[1];
fd = open(filename, O_RDWR);
if (fd < 0) {
printf("file %s open failed\n", filename);
return -1;
}
databuf[0] = atoi(argv[2]);
retval = write(fd, databuf, sizeof(databuf));
if (retval < 0) {
printf("led control failed\n");
close(fd);
return -1;
}
close(fd);
return 0;
}
五、运行测试
5.1 编译
1.编译驱动程序 编写 Makefile 文件,Makefile 内容如下所示:
KERNELDIR := /home/toto/workspace/linux/linux-5.19
CURRENT_PATH := $(shell pwd)
obj-m := dtsplatform_driver.o
build: kernel_modules
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
编译命令:
make -j8
编译成功以后就会生成一个名为“dtsplatform_driver.ko”的驱动模块文件。
2. 编译测试app 编译命令:
arm-linux-gnueabihf-gcc dtsplatform_app.c -o dtsplatform_app
编译成功以后就会生成 platform_app 这个应用程序。
5.2 运行测试
开发板上电,将 dtsplatform_driver.ko 和 dtsplatform_app 这两个文件拷贝到 /lib/modules/5.19.0-g794a2f7be62d-dirty/ 目录中,输入如下命令加载 dtsplatform_driver.ko 这个驱动模块:
insmod dtsplatform_driver.ko
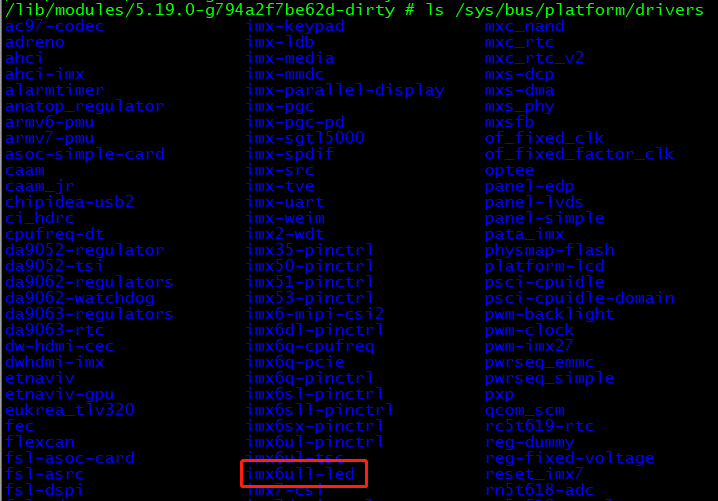
驱动模块加载完成以后到 /sys/bus/platform/drivers/目录下查看驱动是否存在,我们在dtsplatform_driver.c 中设置 led_driver (platform_driver 类型)的 name 字段为“imx6ull-led”,因此会在/sys/bus/platform/drivers/目录下存在名为“imx6ull-led”这个文件,结果如下图所示:
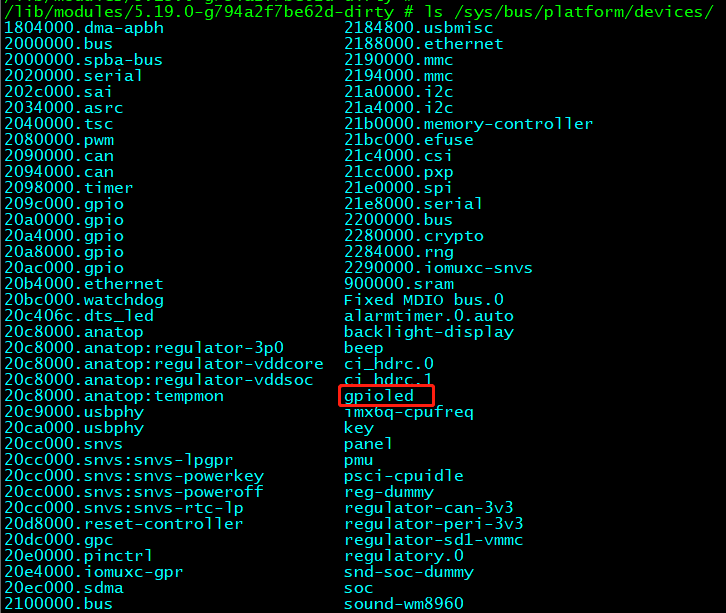
同理,在/sys/bus/platform/devices/目录下也存在 led 的设备文件,也就是设备树中 gpioled 这个节点,结果如下所示:
驱动模块和设备模块加载成功以后 platform 总线就会进行匹配,当驱动和设备匹配成功以后就会输出如下所示一行语句:
/lib/modules/5.19.0-g794a2f7be62d-dirty # insmod dtsplatform_driver.ko
[ 45.657342] led driver and device has matched
驱动和设备匹配成功以后就可以测试 LED 灯驱动了,输入如下命令打开 LED 灯:
./dtsplatform_app /dev/dts_platform_led 1
在输入如下命令关闭 LED 灯:
./dtsplatform_app /dev/dts_platform_led 0
卸载驱动命令如下:
rmmod dtsplatform_driver.ko