【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
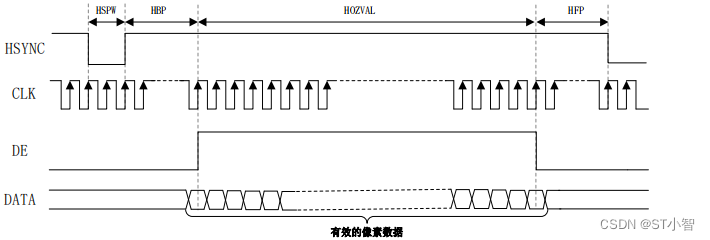
如果说led灯、按键、数码管这些都只能算是基础的话,那么学习fpga遇到的第一个门槛就是uart。要做好uart,首先需要了解串口的一些特性。
1、uart串口的基本特性
1)波特率。所谓波特率,就是多长时间接收一个数据。这个速度可以快,可以慢。关键是双方要匹配。
2)数据的构成。一般uart的数据,由起始位、数据位、校验位、停止位构成。校验位一般不用。所以串口一般是有10个数据构成。
2、开发方法
1)状态机。前面编写的程序都比较简单,印象中除了按键消抖那一章用到了状态机,其他章节都没有用到。事实上,在fpga开发上,状态机用到的地方非常多,不管是底层模块,还是高层模块。
2)开发顺序,可以按照先发送、后接收的方法一步一步来完成。为什么怎么做?主要是因为发送比较纯粹一些,等发送功能开发结束后,可以马上看到效果,提高自己的信心。而且,后续等接收功能开发完毕后,可以把数据回显到发送功能,马上可以进行调试。相反,如果先开发了接收功能,容易看不到效果,打击信心。
3、uart发送
module uart_send(clk, rst, finish_flag, recv_data,out);
input clk;
input rst;
input finish_flag;
input recv_data;
output out;
wire clk;
wire rst;
wire finish_flag;
wire[7:0] recv_data;
reg out;
`define SEND_INTERVAL 32'd49_9999
`define UART_INTERVAL (50*1000000/115200)
reg[31:0] internal_count;
reg[2:0] state;
reg[2:0] next_state;
reg[31:0] count;
reg[2:0] bitnum;
reg[7:0] send_data;
always@(posedge clk or negedge rst)
if(!rst)
send_data <= 8'h30;
else if(finish_flag)
send_data <= recv_data;
always@(posedge clk or negedge rst)
if(!rst)
internal_count <= 32'b0;
else if(state == 3'b000) begin
if(internal_count == `SEND_INTERVAL)
internal_count <= 32'b0;
else
internal_count <= internal_count + 1'b1;
end else
internal_count <= 32'b0;
always@(posedge clk or negedge rst)
if(!rst)
state <= 3'b000;
else
state <= next_state;
always@(*)
if(!rst) begin
next_state <= 3'b000;
end else
case (state)
3'b000:
begin
if(internal_count == `SEND_INTERVAL)
next_state <= 3'b001;
else
next_state <= 3'b000;
end
3'b001:
begin
if(count == `UART_INTERVAL)
next_state <= 3'b010;
else
next_state <= 3'b001;
end
3'b010:
begin
if(count == `UART_INTERVAL && bitnum == 3'b111)
next_state <= 3'b011;
else
next_state <= 3'b010;
end
3'b011:
begin
if(count == `UART_INTERVAL)
next_state <= 3'b000;
else
next_state <= 3'b011;
end
default:
next_state <= 3'b000;
endcase
always @(posedge clk or negedge rst)
if(!rst)
count <= 32'b0;
else if(state != 3'b000) begin
if(count == `UART_INTERVAL)
count <= 32'b0;
else
count <= count + 1'b1;
end else
count <= 32'b0;
always @(posedge clk or negedge rst)
if(!rst)
bitnum <= 3'b000;
else if(state == 3'b010 && count == `UART_INTERVAL)
bitnum <= bitnum + 1;
always @(posedge clk or negedge rst)
if(!rst)
out <= 1'b1;
else begin
case(state)
3'b000:
out <= 1'b1;
3'b001:
out <= 1'b0;
3'b010:
out <= send_data[bitnum];
3'b011:
out <= 1'b1;
default:
out <= 1'b1;
endcase
end
endmodule
整个数据的发送过程基本是按照状态机走的,每10ms发送一次。空闲状态是3'b000,准备发送数据后,状态跳转到3'b001,空闲状态下输出都是1。在这个状态下,首先发送一个bit的起始位,起始位是0。什么时候发送结束呢,就看这个count什么时候达到UART_INTERVAL了,而这个数值正是根据波特率算出来的。起始位发送结束后,状态跳转到3'b010。这个状态是数据位,总共有8位数据需要发送。等全部数据发送结束后,状态继续跳转到3'b011,即停止位数据的发送。这就是大概的步骤。
整个代码中,使用到了一个小技巧,那就是bitnum。bitnum巧妙地利用了数据溢出效应,在所有的8位数据发送之后,重新reset为0。
4、uart接收
module uart_recv(clk, rst, in, finish_flag, recv_data, led);
input clk;
input rst;
input in;
output finish_flag;
output recv_data;
output led; // only for debug use
// baudrate setting
localparam RECV_INTERVAL= 50*1000000/115200;
localparam LED_INTERVAL = 32'd4999_9999;
wire clk;
wire rst;
wire in;
reg led;
reg[31:0] led_count;
reg tmp0;
reg tmp1;
wire diff;
// value for state machine
reg[2:0] state;
reg[2:0] next_state;
assign diff = tmp1 && ~tmp0;
reg[31:0] interval_cnt;
reg[2:0] bit_cnt;
reg[7:0] recv_latch;
reg[7:0] recv_data;
// recv_data to store input data
always @(posedge clk or negedge rst)
if(!rst)
recv_data <= 8'b0;
else if(state == 3'b100)
recv_data <= recv_latch;
// finish flag
reg finish_flag;
always@(posedge clk or negedge rst)
if(!rst)
finish_flag <= 1'b0;
else if(finish_flag)
finish_flag <= 1'b0;
else if(state == 3'b100)
finish_flag <= 1'b1;
// count for led debug
always @(posedge clk or negedge rst)
if(!rst)
led_count <= 32'b0;
else if(led) begin
if(led_count != LED_INTERVAL)
led_count <= led_count + 1;
else
led_count <= 32'b0;
end else
led_count <= 32'b0;
// led for debug signal
always @(posedge clk or negedge rst)
if(!rst)
led <= 1'b0;
else if(led && led_count == LED_INTERVAL)
led <= 1'b0;
else if(finish_flag)
led <= 1'b1;
// state machine
always @(posedge clk or negedge rst)
if(!rst)
state <= 3'b000;
else
state <= next_state;
always @(*)
if(!rst)
next_state <= 3'b000;
else
case (state)
3'b000:
if(diff)
next_state <= 3'b001;
else
next_state <= 3'b000;
3'b001:
if(interval_cnt == RECV_INTERVAL)
next_state <= 3'b010;
else
next_state <= 3'b001;
3'b010:
if(interval_cnt == RECV_INTERVAL && bit_cnt == 3'b111)
next_state <= 3'b011;
else
next_state <= 3'b010;
3'b011:
if(interval_cnt == RECV_INTERVAL/2 - 1)
next_state <= 3'b100;
else
next_state <= 3'b011;
3'b100: // make sure data has been received
next_state <= 3'b000;
default:
next_state <= 3'b000;
endcase
// interval count
always @(posedge clk or negedge rst)
if(!rst)
interval_cnt <= 32'b0;
else if(state != 3'b000) begin
if(interval_cnt == RECV_INTERVAL)
interval_cnt <= 32'b0;
else
interval_cnt <= interval_cnt + 1'b1;
end else
interval_cnt <= 32'b0;
always @(posedge clk or negedge rst)
if(!rst)
bit_cnt <= 3'b000;
else if(state == 3'b010) begin
if(interval_cnt == RECV_INTERVAL)
bit_cnt <= bit_cnt + 1'b1;
end
// get data
always @(posedge clk or negedge rst)
if(!rst)
tmp0 <= 1'b0;
else
tmp0 <= in;
always @(posedge clk or negedge rst)
if(!rst)
tmp1 <= 1'b0;
else
tmp1 <= tmp0;
// recv data bit by bit
always @(posedge clk or negedge rst)
if(!rst)
recv_latch <= 8'b0;
else
case(state)
3'b010:
if(interval_cnt == RECV_INTERVAL/2 -1)
recv_latch[bit_cnt] <= tmp1;
default:
recv_latch <= recv_latch;
endcase
endmodule
uart的接收部分也使用到了状态机。其中3'b000代表空闲状态。什么时候开始接收数据呢,就看diff什么时候变更为1。接下来的步骤就和uart发送有点类似了,先是接收起始位,然后是有效数据位,最后是停止位。对于我们来说,真正有效的部分是数据位。状态机有两个地方需要注意下,第一是停止位在RECV_INTREVAL/2-1就可以停下来了,这主要为了防止后面新的数据丢失;第二添加了一个3'b100状态,这是为了可以让finish_flag和recv_data同时有效。
另外还有一个小插曲。由于不怎么会用signal tap,就用led进行了调试。即,如果真的收到了数据,led亮起,延时1s。
// count for led debug
always @(posedge clk or negedge rst)
if(!rst)
led_count <= 32'b0;
else if(led) begin
if(led_count != LED_INTERVAL)
led_count <= led_count + 1;
else
led_count <= 32'b0;
end else
led_count <= 32'b0;
// led for debug signal
always @(posedge clk or negedge rst)
if(!rst)
led <= 1'b0;
else if(led && led_count == LED_INTERVAL)
led <= 1'b0;
else if(finish_flag)
led <= 1'b1;
关于uart接收部分,还有一个想说的,就是真正数据接收的部分都是在RECV_INTERVAL/2-1来完成的。大家可以想想为什么。
5、测试总入口
module uart_test(clk, rst, in, out, led);
input clk;
input rst;
input in;
output out;
output led;
wire clk;
wire rst;
wire in;
wire out;
wire led;
wire finish_flag;
wire[7:0] recv_data;
uart_recv uart_recv0(
.clk(clk),
.rst(rst),
.in(in),
.finish_flag(finish_flag),
.recv_data(recv_data),
.led(led)
);
uart_send uart_send0(
.clk(clk),
.rst(rst),
.finish_flag(finish_flag),
.recv_data(recv_data),
.out(out)
);
endmodule
这个测试总入口非常简单,就是分别把uart_send和uart_recv实例化,用finish_flag和recv_data把两者之间联系在一起。
6、pin绑定
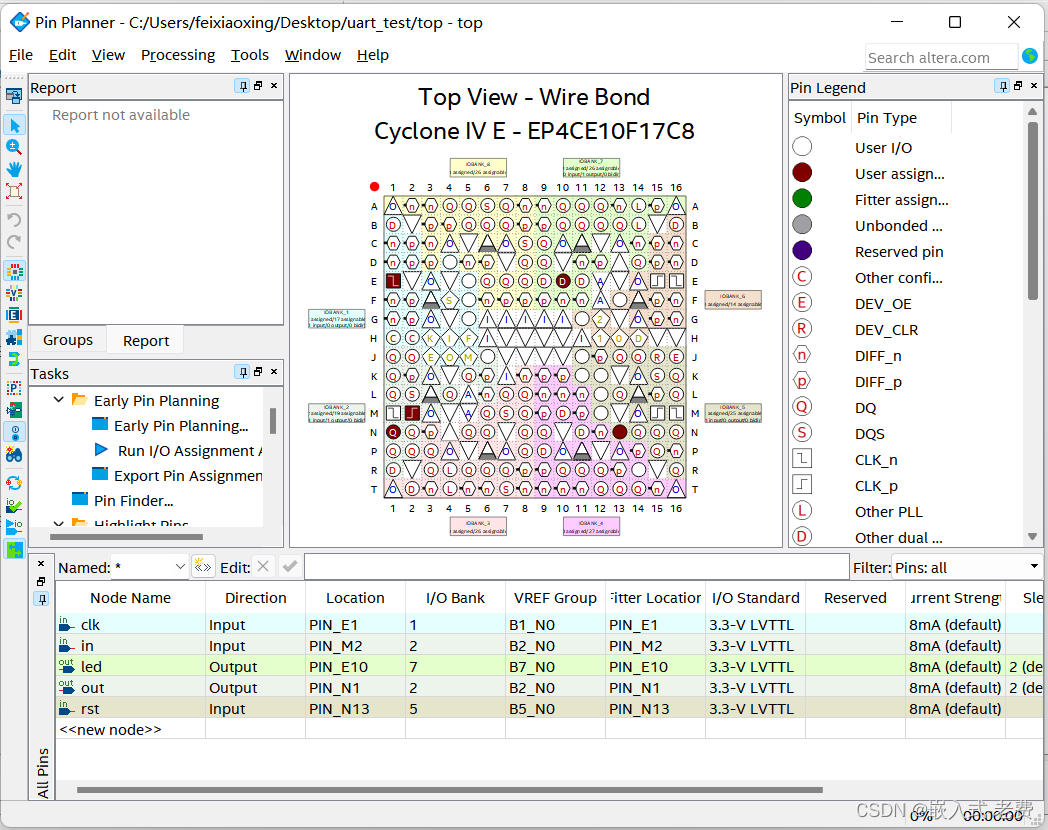
所有这些都准备好之后,就可以把信号和pin脚bind在一起了。生成sof文件,烧入开发板。
7、开始实验
实验主要分成两部分。一部分是上电的时候;一部分是按下按键的时候。选择一个串口软件,这里用的putty。ax301开发板选择了usb转串口的芯片,所以本身相当于自带串口的。首先,需要以管理员身份打开putty。建议先打开putty,后烧入sof。

接着,你会看到这样的窗口,
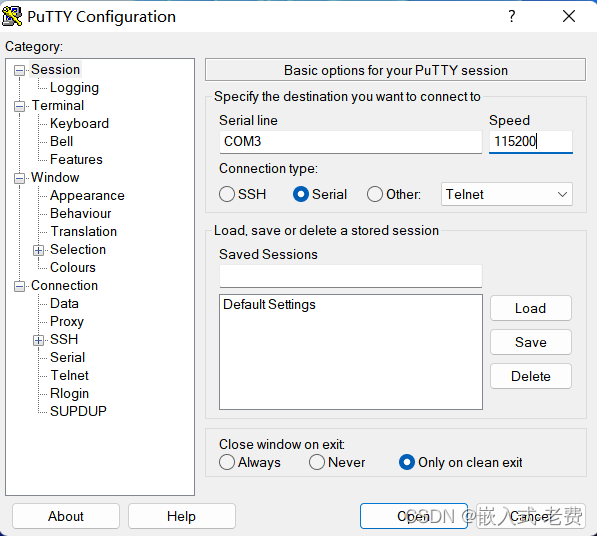
设置好串口和波特率之后,直接单击Open,就可以看到相关的打印,
这个时候如果按下数字1,就会发现打印的内容发生了变化,
具体操作,还是希望大家多实践实践。