STM32 CAN快速配置(HAL库版本)
目录
- STM32 CAN快速配置(HAL库版本)
- 前言
- 1 软件编程
- 1.1 初始化
- 1.1.1 引脚设置
- 1.1.2 CAN参数设置
- 1.1.3 CAN滤波器设置
- 1.2 CAN发送
- 1.3 CAN接收
- 2 运行测试
- 结束语
前言
控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。CAN协议用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。该协议的健壮性使其用途延伸到其他自动化和工业应用。CAN协议的特性包括完整性的串行数据通讯、提供实时支持、传输速率高达1Mb/s、同时具有11位的寻址以及检错能力。
特别说明:关于CAN总线协议和硬件电路等问题,这里不做介绍,网上的资料非常多,不懂的同学请自行查阅。
1 软件编程
1.1 初始化
初始化主要分成三部分:引脚设置,CAN参数设置和CAN滤波器设置。
1.1.1 引脚设置
把CAN_H和CAN_L两个引脚配置成复用功能即可。
注:如果CAN控制芯片的S引脚连接到STM32的话,还得初始化这个引脚,S引脚可以配置成高速模式或静音模式。
参考代码:
注:该代码可以通过STM32CubeMX生成
/**
* @brief CAN MSP Initialization
* This function configures the hardware resources used in this example
* @param hcan: CAN handle pointer
* @retval None
*/
void HAL_CAN_MspInit(CAN_HandleTypeDef* hcan)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(hcan->Instance==CAN1)
{/* USER CODE END CAN1_MspInit 0 */
/* Peripheral clock enable */
HAL_RCC_CAN1_CLK_ENABLED++;
if(HAL_RCC_CAN1_CLK_ENABLED==1){
__HAL_RCC_CAN1_CLK_ENABLE();
}
__HAL_RCC_GPIOA_CLK_ENABLE();
/**CAN1 GPIO Configuration
PA11 ------> CAN1_RX
PA12 ------> CAN1_TX
*/
GPIO_InitStruct.Pin = GPIO_PIN_11|GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_CAN1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* CAN1 interrupt Init */
HAL_NVIC_SetPriority(CAN1_RX0_IRQn, 0, 0); // CAN接收中断
HAL_NVIC_EnableIRQ(CAN1_RX0_IRQn);
}
}
1.1.2 CAN参数设置
HAL库的CAN初始化有几个重要参数,都存放在几个结构体里面(如:CAN_HandleTypeDef,CAN_InitTypeDef),具体的结构体定义可以在HAL库查看。
说明:CAN参数需要根据自己实际的需求来配。
我这里着重讲解一下CAN波特率的配置。
CAN波特率 = CAN时钟频率 / 分频系数 / (TimeSeg1 + TimeSeg2 + 1)。
其中,CAN时钟频率不是固定不变的,它取决于CAN所挂载的总线时钟。
比如STM32F1,系统时钟最大72M,APB1的总线时钟最大36M,而CAN控制器的时钟是挂在APB1的,所以CAN的时钟频率也等于APB1的时钟。
如果换作其他型号的MCU,CAN外设不一定是挂载到APB1上面的,时钟也不一定是36M,比如F4系列,APB1的时钟是可以配成42M的,因此,这个要根据实际情况来配置。
参考代码:
注:该代码可以通过STM32CubeMX生成
/**
* @brief CAN1 Initialization Function
* @param None
* @retval None
*/
static void MX_CAN_Init(void)
{
// CAN波特率 = CAN时钟频率 / Prescaler / (TimeSeg1 + TimeSeg2 + 1)
// 例: 500kbps = 36MHz / 9 / (3 + 4 + 1) 36MHz为该例程APB1的总线时钟
/* USER CODE END CAN1_Init 1 */
hcan.Instance = CAN1; // 配置CAN1
hcan.Init.Prescaler = 9; // 预分频系数
hcan.Init.Mode = CAN_MODE_NORMAL; // 正常CAN模式
hcan.Init.SyncJumpWidth = CAN_SJW_1TQ; // 重同步跳跃宽度,CAN_SJW_1TQ~CAN_SJW_4TQ
hcan.Init.TimeSeg1 = CAN_BS1_3TQ; // TimeSeg1
hcan.Init.TimeSeg2 = CAN_BS2_4TQ; // TimeSeg2
hcan.Init.TimeTriggeredMode = DISABLE; // 非时间触发通信模式
hcan.Init.AutoBusOff = DISABLE; // 软件自动离线管理
hcan.Init.AutoWakeUp = DISABLE; // 睡眠模式通过软件唤醒(清除CAN->MCR的SLEEP位)
hcan.Init.AutoRetransmission = DISABLE; // 禁止报文自动重传
hcan.Init.ReceiveFifoLocked = DISABLE; // FIFO报文不锁定,新的覆盖旧的
hcan.Init.TransmitFifoPriority = DISABLE; // 优先级由报文标识符决定
if (HAL_CAN_Init(&hcan) != HAL_OK)
{
Error_Handler();
}
}
1.1.3 CAN滤波器设置
CAN滤波器的主要作用是筛选CAN接收的数据,只有满足设定规则的数据才会被接收,否则会被过滤掉。
参考代码:
void CAN_Config(void)
{
CAN_FilterTypeDef sFilterConfig;
/* Configure the CAN Filter */
sFilterConfig.FilterBank = 0; // 过滤器编号,使用一个CAN,则可选0-13;使用两个CAN可选0-27
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; // 过滤器模式,掩码模式或列表模式
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; // 过滤器位宽
sFilterConfig.FilterIdHigh = 0x0000; // 过滤器验证码ID高16位,0-0xFFFF
sFilterConfig.FilterIdLow = 0x0000; // 过滤器验证码ID低16位,0-0xFFFF
sFilterConfig.FilterMaskIdHigh = 0x0000; // 过滤器掩码ID高16位,0-0xFFFF
sFilterConfig.FilterMaskIdLow = 0x0000; // 过滤器掩码ID低16位,0-0xFFFF
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0; // FIFOx,0或1
sFilterConfig.FilterActivation = ENABLE; // 使能过滤器
sFilterConfig.SlaveStartFilterBank = 14; // 从过滤器编号,0-27,对于单CAN实例该参数没有意义
if (HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK)
{
/* Filter configuration Error */
}
/* Start the CAN peripheral */
if (HAL_CAN_Start(&hcan) != HAL_OK)
{
/* Start Error */
}
/* Activate CAN RX notification */
if (HAL_CAN_ActivateNotification(&hcan, CAN_IT_RX_FIFO0_MSG_PENDING) != HAL_OK)
{
/* Notification Error */
}
}
1.2 CAN发送
CAN发送需要先配置发送参数,我这里为了方便测试,直接固定发送标准帧,ID也是固定的。
实际使用时可以再增加一个ID的入参,这样会更灵活一点。
参考代码:
/****************************************************************************
* 名 称: uint8_t CAN_Send_Msg(uint8_t* msg, uint8_t len)
* 功 能:can发送一组数据(固定格式:ID为0X12,标准帧,数据帧)
* 入口参数:len:数据长度(最大为8)
msg:数据指针,最大为8个字节.
* 返回参数:0,成功;
其他,失败;
* 说 明:
****************************************************************************/
uint8_t CAN_Send_Msg(uint8_t* msg, uint8_t len)
{
uint8_t i=0;
uint8_t message[8];
uint32_t TxMailbox;
CAN_TxHeaderTypeDef CAN_TxHeader;
// 设置发送参数
CAN_TxHeader.StdId = 0x12; // 标准标识符(12bit)
CAN_TxHeader.ExtId = 0x12; // 扩展标识符(29bit)
CAN_TxHeader.IDE = CAN_ID_STD; // 使用标准帧
CAN_TxHeader.RTR = CAN_RTR_DATA; // 数据帧
CAN_TxHeader.DLC = len; // 发送长度
CAN_TxHeader.TransmitGlobalTime = DISABLE;
// 装载数据
for(i = 0; i < len; i++)
{
message[i] = msg[i];
}
// 发送CAN消息
if(HAL_CAN_AddTxMessage(&hcan, &CAN_TxHeader, message, &TxMailbox) != HAL_OK)
{
return 1;
}
while(HAL_CAN_GetTxMailboxesFreeLevel(&hcan) != 3)
{
}
return 0;
}
1.3 CAN接收
接收部分只要开启了Rx中断,在CAN控制器收到消息时会调用RxFifo的回调函数,此时我们在这里读取数据并根据实际情况做相应的处理即可。
参考代码:
/*******************************************************************************
* Function Name : HAL_CAN_RxFifo0MsgPendingCallback
* Description : 消息接收回调函数
* Input : hcan
* Output : None
* Return : None
****************************************************************************** */
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{// 收到CAN数据会触发接收中断,进入该回调函数
uint32_t i;
uint8_t RxData[8];
CAN_RxHeaderTypeDef CAN_RxHeader;
if(HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &CAN_RxHeader, RxData) == HAL_OK)
{
// 串口打印接收结果
printf("GetRxMessage, CANID:0x%0X, Data:", CAN_RxHeader.StdId);
for(i = 0;i < CAN_RxHeader.DLC; i++)
{
printf("%02x ", RxData[i]);
}
// 把接收的数据用CAN再发回去
CAN_Send_Msg(RxData, CAN_RxHeader.DLC);
}
}
2 运行测试
使用USB-CAN工具测试发送:
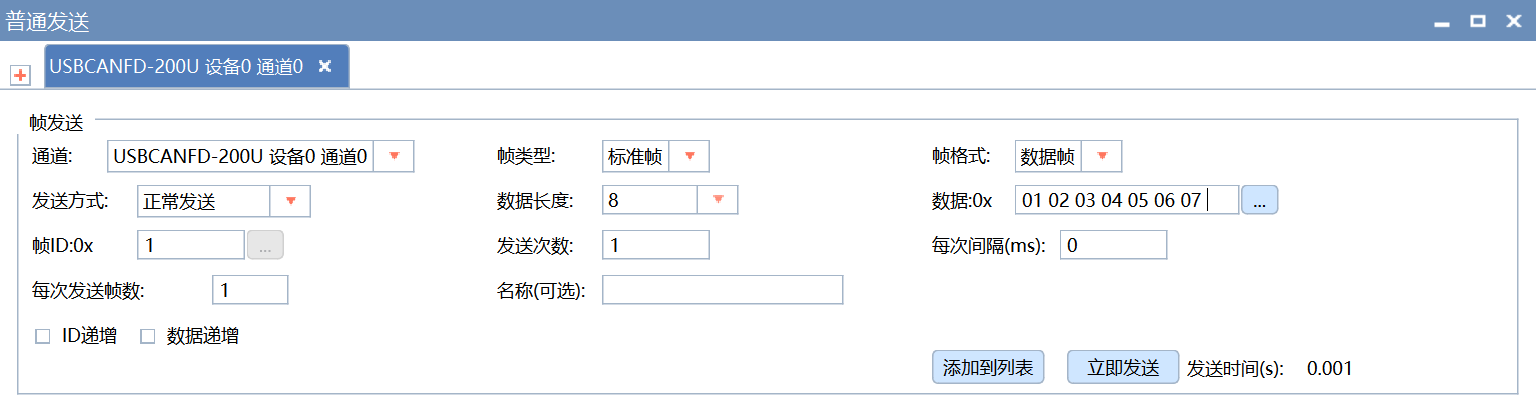
消息窗口如下:

可以看到,上位机发送了一条CAN数据,CANID为0x01,接着就收到了STM32回的一条数据,CANID为0x12(因为我代码固定写死了ID为0x12)。
同样的,通过串口也能看到STM32收到的CAN数据,如下图所示:

还有一些其他测试,比如收发不同长度,切换扩展帧等等,这里就不展示了,感兴趣的同学可以自己改参数试试。
结论:CAN收发正常。
结束语
好了,关于如何通过STM32如何配置和使用CAN就讲到这里,如果你有什么问题或者有更好的方法,欢迎在评论区留言。