spi万能驱动:spidev.c文件
存放在内核/drivers/spi/spidev.c文件。
内核开放的通用版本的spi驱动。
内核集成spidev驱动模块,开机后会中的加载此模块。
支持修改多种spi通信参数。
两个数据类型
spidev_data结构体
fops中的函数结构都要用到,会被赋值给file->private_data。
struct spidev_data {
// 设备号
dev_t devt;
spinlock_t spi_lock;
struct spi_device *spi;
struct list_head device_entry;
struct mutex buf_lock;
unsigned users;
// 发送buf,接收buf,通信频率
u8 *tx_buffer;
u8 *rx_buffer;
u32 speed_hz;
};spi_ioc_transfer结构体
可用来设置spi的通信参数,但很少用,用户空间编程也会用到此结构体。
struct spi_ioc_transfer {
__u64 tx_buf; // spi数据发送缓存区
__u64 rx_buf; // spi数据接收缓存区
__u32 len; // 收发数据长度
__u32 speed_hz;
__u16 delay_usecs;
__u8 bits_per_word;
__u8 cs_change;
__u8 tx_nbits;
__u8 rx_nbits;
__u16 pad;
};设备子节点
pinctrl子节点
pinctrl_ecspi3:ecspi3grp {
// 此属性来记录一个引脚组
fsl,pins = <
MX6UL_PAD_UART2_TX_DATA__ECSPI3_SS0 0x1a090
MX6UL_PAD_UART2_RX_DATA__ECSPI3_SCLK 0x11090
MX6UL_PAD_UART2_CTS_B__ECSPI3_MOSI 0x11090
MX6UL_PAD_UART2_RTS_B__ECSPI3_MISO 0x11090
>;
};spidev子节点
&ecspi3{
pinctrl-names = "default";
// default表示使用pinctrl-0引脚组
pinctrl-0 = <&pinctrl_ecspi3>;
status = "okay";
#address-cells = <1>;
#size-cells = <0>;
// 追加一个设备节点
// 此节点挂载在spi节点下,会被内核解析成一个spi_device设备,挂在对应的spi总线上
spidev@0 {
// 用来匹配对应的驱动,pdidev.c
compatible = "spidev";
spi-max-frequency = <20000000>;
reg = <0>;
};
};spidev_init()函数
static int __init spidev_init(void)
{
int status;
...
// 申请设备号,参数1主设备号为153
// 这一步将主设备号153机器所有的次设备号都占用了
status = register_chrdev(SPIDEV_MAJOR, "spi", &spidev_fops);
...
// 创建spidev设备类,新增/sys/class/spidev
spidev_class = class_create(THIS_MODULE, "spidev");
...
// 向内核注册一个spi设备驱动
status = spi_register_driver(&spidev_spi_driver);
...
return status;
}
static const struct file_operations spidev_fops = {
.owner = THIS_MODULE,
.write = spidev_write,
.read = spidev_read,
.unlocked_ioctl = spidev_ioctl, // 应用层 ioctl()函数底层操作接口(32位系统)
.compat_ioctl = spidev_compat_ioctl, // 应用层 ioctl()函数底层操作接口(64位系统)
.open = spidev_open,
.release = spidev_release,
.llseek = no_llseek,
};read和write接口只能半双工收发消息
spi支持全双工,可使用unlocked_ioctl接口可以支持半双工、全双工(switch的default选择)收发消息
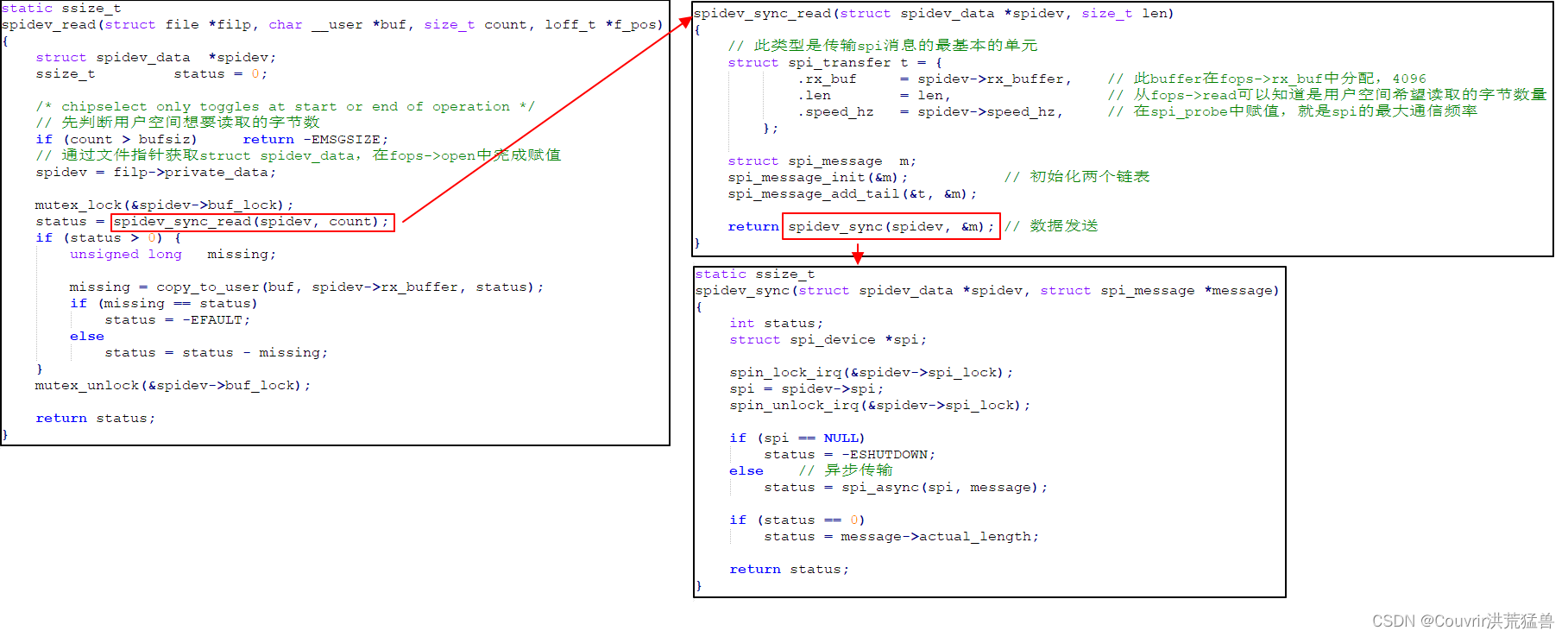
spidev_read()函数
static ssize_t
spidev_read(struct file *filp, char __user *buf, size_t count, loff_t *f_pos)
{
struct spidev_data *spidev;
ssize_t status = 0;
/* chipselect only toggles at start or end of operation */
// 先判断用户空间想要读取的字节数
if (count > bufsiz)
return -EMSGSIZE;
// 通过文件指针获取struct spidev_data,在fops->open中完成赋值
spidev = filp->private_data;
mutex_lock(&spidev->buf_lock);
// 详见下
status = spidev_sync_read(spidev, count);
if (status > 0) {
unsigned long missing;
missing = copy_to_user(buf, spidev->rx_buffer, status);
if (missing == status)
status = -EFAULT;
else
status = status - missing;
}
mutex_unlock(&spidev->buf_lock);
return status;
}
spidev_ioctl()函数
32bit系统对应fops中的unlocked_ioctl接口,即spidev_ioctl。
#define SPI_MODE_MASK (SPI_CPHA|SPI_CPOL|SPI_CS_HIGH|SPI_LSB_FIRST|SPI_3WIRE|SPI_LOOP|SPI_NO_CS|SPI_READY)
static long
spidev_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int retval = 0;
struct spidev_data *spidev;
struct spi_device *spi;
u32 tmp;
unsigned n_ioc;
struct spi_ioc_transfer *ioc;
...
spidev = filp->private_data;
spin_lock_irq(&spidev->spi_lock);
spi = spi_dev_get(spidev->spi);
spin_unlock_irq(&spidev->spi_lock);
...
// 由应用层函数ioctl的参数2传递进来,具体的控制命令
// 控制命令可以分为两类:读和写
switch (cmd) {
/* read requests */
case SPI_IOC_RD_MODE://put_user:复制到用户空间,此处复制spi控制器的模式
retval = put_user(spi->mode & SPI_MODE_MASK,
(__u8 __user *)arg);
break;
case SPI_IOC_RD_MODE32:
retval = put_user(spi->mode & SPI_MODE_MASK,
(__u32 __user *)arg);
break;
case SPI_IOC_RD_LSB_FIRST:
retval = put_user((spi->mode & SPI_LSB_FIRST) ? 1 : 0,
(__u8 __user *)arg);
break;
case SPI_IOC_RD_BITS_PER_WORD:
retval = put_user(spi->bits_per_word, (__u8 __user *)arg);
break;
case SPI_IOC_RD_MAX_SPEED_HZ:
retval = put_user(spidev->speed_hz, (__u32 __user *)arg);
break;
/* write requests */
case SPI_IOC_WR_MODE:
case SPI_IOC_WR_MODE32:
if (cmd == SPI_IOC_WR_MODE)
retval = get_user(tmp, (u8 __user *)arg);
else
retval = get_user(tmp, (u32 __user *)arg);
if (retval == 0) {
u32 save = spi->mode;
if (tmp & ~SPI_MODE_MASK) {
retval = -EINVAL;
break;
}
tmp |= spi->mode & ~SPI_MODE_MASK;
// 根据写入的内容去设置mode
spi->mode = (u16)tmp;
// 重新设置spi设备的相关属性
retval = spi_setup(spi);
if (retval < 0)
spi->mode = save;
else
dev_dbg(&spi->dev, "spi mode %x\n", tmp);
}
break;
case SPI_IOC_WR_LSB_FIRST:
retval = get_user(tmp, (__u8 __user *)arg);
if (retval == 0) {
u32 save = spi->mode;
if (tmp)
spi->mode |= SPI_LSB_FIRST;
else
spi->mode &= ~SPI_LSB_FIRST;
retval = spi_setup(spi);
if (retval < 0)
spi->mode = save;
else
dev_dbg(&spi->dev, "%csb first\n",
tmp ? 'l' : 'm');
}
break;
case SPI_IOC_WR_BITS_PER_WORD:
retval = get_user(tmp, (__u8 __user *)arg);
if (retval == 0) {
u8 save = spi->bits_per_word;
spi->bits_per_word = tmp;
retval = spi_setup(spi);
if (retval < 0)
spi->bits_per_word = save;
else
dev_dbg(&spi->dev, "%d bits per word\n", tmp);
}
break;
case SPI_IOC_WR_MAX_SPEED_HZ:
retval = get_user(tmp, (__u32 __user *)arg);
if (retval == 0) {
u32 save = spi->max_speed_hz;
spi->max_speed_hz = tmp;
retval = spi_setup(spi);
if (retval >= 0)
spidev->speed_hz = tmp;
else
dev_dbg(&spi->dev, "%d Hz (max)\n", tmp);
spi->max_speed_hz = save;
}
break;
default://发送特殊的数据,很少使用
/* segmented and/or full-duplex I/O request */
/* Check message and copy into scratch area */
// 获取用户空间传入的struct spi_ioc_transfer
// 参数2可能是个数组,参数3表示元素的个数
ioc = spidev_get_ioc_message(cmd,
(struct spi_ioc_transfer __user *)arg, &n_ioc);
if (IS_ERR(ioc)) {
retval = PTR_ERR(ioc);
break;
}
if (!ioc)
break; /* n_ioc is also 0 */
/* translate to spi_message, execute */
// 此函数实现和spidev_read差不多,详见下
retval = spidev_message(spidev, ioc, n_ioc);
kfree(ioc);
break;
}
mutex_unlock(&spidev->buf_lock);
spi_dev_put(spi);
return retval;
}spidev_message()函数
全双工收发信息,本质上还是调用一些spi核心层的函数。
static int spidev_message(struct spidev_data *spidev,
struct spi_ioc_transfer *u_xfers, unsigned n_xfers)
{
struct spi_message msg;
struct spi_transfer *k_xfers;
struct spi_transfer *k_tmp;
struct spi_ioc_transfer *u_tmp;
unsigned n, total, tx_total, rx_total;
u8 *tx_buf, *rx_buf;
int status = -EFAULT;
// 初始化struct spi_message
spi_message_init(&msg);
k_xfers = kcalloc(n_xfers, sizeof(*k_tmp), GFP_KERNEL);
if (k_xfers == NULL)
return -ENOMEM;
tx_buf = spidev->tx_buffer;
rx_buf = spidev->rx_buffer;
total = 0;
tx_total = 0;
rx_total = 0;
for (n = n_xfers, k_tmp = k_xfers, u_tmp = u_xfers;
n;
n--, k_tmp++, u_tmp++) {
k_tmp->len = u_tmp->len;
total += k_tmp->len;
if (total > INT_MAX || k_tmp->len > INT_MAX) {
status = -EMSGSIZE;
goto done;
}
if (u_tmp->rx_buf) {
/* this transfer needs space in RX bounce buffer */
rx_total += k_tmp->len;
if (rx_total > bufsiz) {
status = -EMSGSIZE;
goto done;
}
k_tmp->rx_buf = rx_buf;
rx_buf += k_tmp->len;
}
if (u_tmp->tx_buf) {
/* this transfer needs space in TX bounce buffer */
tx_total += k_tmp->len;
if (tx_total > bufsiz) {
status = -EMSGSIZE;
goto done;
}
k_tmp->tx_buf = tx_buf;
// 全双工之收,读取用户空间的数据
if (copy_from_user(tx_buf, (const u8 __user *)
(uintptr_t) u_tmp->tx_buf,
u_tmp->len))
goto done;
tx_buf += k_tmp->len;
}
k_tmp->cs_change = !!u_tmp->cs_change;
k_tmp->tx_nbits = u_tmp->tx_nbits;
k_tmp->rx_nbits = u_tmp->rx_nbits;
k_tmp->bits_per_word = u_tmp->bits_per_word;
k_tmp->delay_usecs = u_tmp->delay_usecs;
k_tmp->speed_hz = u_tmp->speed_hz;
if (!k_tmp->speed_hz)
k_tmp->speed_hz = spidev->speed_hz;
#ifdef VERBOSE
dev_dbg(&spidev->spi->dev,
" xfer len %u %s%s%s%dbits %u usec %uHz\n",
u_tmp->len,
u_tmp->rx_buf ? "rx " : "",
u_tmp->tx_buf ? "tx " : "",
u_tmp->cs_change ? "cs " : "",
u_tmp->bits_per_word ? : spidev->spi->bits_per_word,
u_tmp->delay_usecs,
u_tmp->speed_hz ? : spidev->spi->max_speed_hz);
#endif
spi_message_add_tail(k_tmp, &msg);
}
// 同步发送
status = spidev_sync(spidev, &msg);
if (status < 0)
goto done;
/* copy any rx data out of bounce buffer */
rx_buf = spidev->rx_buffer;
for (n = n_xfers, u_tmp = u_xfers; n; n--, u_tmp++) {
if (u_tmp->rx_buf) {
// 全双工之发,发回用户空间的数据
if (copy_to_user((u8 __user *)
(uintptr_t) u_tmp->rx_buf, rx_buf,
u_tmp->len)) {
status = -EFAULT;
goto done;
}
rx_buf += u_tmp->len;
}
}
status = total;
done:
kfree(k_xfers);
return status;
}spidev_get_ioc_message()函数
static struct spi_ioc_transfer *
spidev_get_ioc_message(unsigned int cmd, struct spi_ioc_transfer __user *u_ioc,
unsigned *n_ioc)
{
u32 tmp;
// 帕努单命令的合法性
/* Check type, command number and direction */
if (_IOC_TYPE(cmd) != SPI_IOC_MAGIC
|| _IOC_NR(cmd) != _IOC_NR(SPI_IOC_MESSAGE(0))
|| _IOC_DIR(cmd) != _IOC_WRITE)
return ERR_PTR(-ENOTTY);
// 此处约定cmd表示struct spi_ioc_transfer数组总的大小
tmp = _IOC_SIZE(cmd);
if ((tmp % sizeof(struct spi_ioc_transfer)) != 0)
return ERR_PTR(-EINVAL);
// struct spi_ioc_transfer数组元素个数
*n_ioc = tmp / sizeof(struct spi_ioc_transfer);
if (*n_ioc == 0)
return NULL;
/* copy into scratch area */
// 申请内存,复制结构体,返回回去
return memdup_user(u_ioc, tmp);
}应用层对应的ioctl()函数
应用层函数,用来控制文件。
#include <sys/ioctl.h>
/*
* fd:要控制的文件描述符
* request:控制命令
*/
int ioctl(int fd, int request, ...);
/*
* 返回值:
* 成功:
* 失败:-1
*/spidev_open()函数
为tx_buffer、rx_buffer分配4096字节内存。
static int spidev_open(struct inode *inode, struct file *filp)
{
struct spidev_data *spidev;
int status = -ENXIO;
mutex_lock(&device_list_lock);
// 之前在spidev_probe中将spidev加入到device_list中保存
list_for_each_entry(spidev, &device_list, device_entry) {
// 通过设备号来匹配
if (spidev->devt == inode->i_rdev) {
status = 0;
break;
}
}
if (status) {
pr_debug("spidev: nothing for minor %d\n", iminor(inode));
goto err_find_dev;
}
if (!spidev->tx_buffer) {
// 为空则分配内存,参数1为4096
spidev->tx_buffer = kmalloc(bufsiz, GFP_KERNEL);
if (!spidev->tx_buffer) {
dev_dbg(&spidev->spi->dev, "open/ENOMEM\n");
status = -ENOMEM;
goto err_find_dev;
}
}
if (!spidev->rx_buffer) {
// 为空则分配内存,参数1为4096
spidev->rx_buffer = kmalloc(bufsiz, GFP_KERNEL);
if (!spidev->rx_buffer) {
dev_dbg(&spidev->spi->dev, "open/ENOMEM\n");
status = -ENOMEM;
goto err_alloc_rx_buf;
}
}
spidev->users++;
// spidev 记录在文件指针里面
filp->private_data = spidev;
// 让当前文件不支持lseek函数
nonseekable_open(inode, filp);
mutex_unlock(&device_list_lock);
return 0;
err_alloc_rx_buf:
kfree(spidev->tx_buffer);
spidev->tx_buffer = NULL;
err_find_dev:
mutex_unlock(&device_list_lock);
return status;
}spidev_probe()函数
主要内容:
创建字符设备
次设备号按位图分配
设备文件名后缀数字的含义
spi控制器编号
spi设备片选信号编号
static int spidev_probe(struct spi_device *spi)
{
struct spidev_data *spidev;
int status;
unsigned long minor;
...
/* Allocate driver data */
spidev = kzalloc(sizeof(*spidev), GFP_KERNEL);
if (!spidev)
return -ENOMEM;
/* Initialize the driver data */
spidev->spi = spi;
spin_lock_init(&spidev->spi_lock);
mutex_init(&spidev->buf_lock);
INIT_LIST_HEAD(&spidev->device_entry);
/* If we can allocate a minor number, hook up this device.
* Reusing minors is fine so long as udev or mdev is working.
*/
mutex_lock(&device_list_lock);
// 分配一个次设备号,从256个次设备号中提取1个
minor = find_first_zero_bit(minors, N_SPI_MINORS);
if (minor < N_SPI_MINORS) {
struct device *dev;
// 此成员记录设备号
spidev->devt = MKDEV(SPIDEV_MAJOR, minor);
// 参数4表示spi控制器的编号,参数5表示spi设备使用哪个片选信号
dev = device_create(spidev_class, &spi->dev, spidev->devt,
spidev, "spidev%d.%d",
spi->master->bus_num, spi->chip_select);
status = PTR_ERR_OR_ZERO(dev);
} else {
dev_dbg(&spi->dev, "no minor number available!\n");
status = -ENODEV;
}
if (status == 0) {
set_bit(minor, minors);
// 链接
list_add(&spidev->device_entry, &device_list);
}
mutex_unlock(&device_list_lock);
spidev->speed_hz = spi->max_speed_hz;
if (status == 0)
spi_set_drvdata(spi, spidev);
else
kfree(spidev);
return status;
}