一、GPIO简介
引脚电平 0-3.3V,部分可容忍5V,对输出而言最大只能输出3.3V,
只要可以用高低电平来控制的地方,都可以用GPIO来完成,如果控制的功率比较大的设备,只需加入驱动电路即可
GPIO 通用输入输出口,可配置为 8种 输入输出模式。
-
输出模式下可控制端口输出高低电平,用以驱动LED、控制蜂鸣器、模拟通信协议输出时序等。而如果控制的是功率比较大的设备,只需要再添加驱动电路即可。
-
输入模式下可读取端口的高低电平或电压,用于读取按键输入、外接模块电平信号输入(GPIO甚至还能配置成模拟信号输入的模式,配合内部的ADC外设就能直接读取模拟电压了)、ADC电压采集、模拟通信协议接收数据等。
二、GPIO基本结构
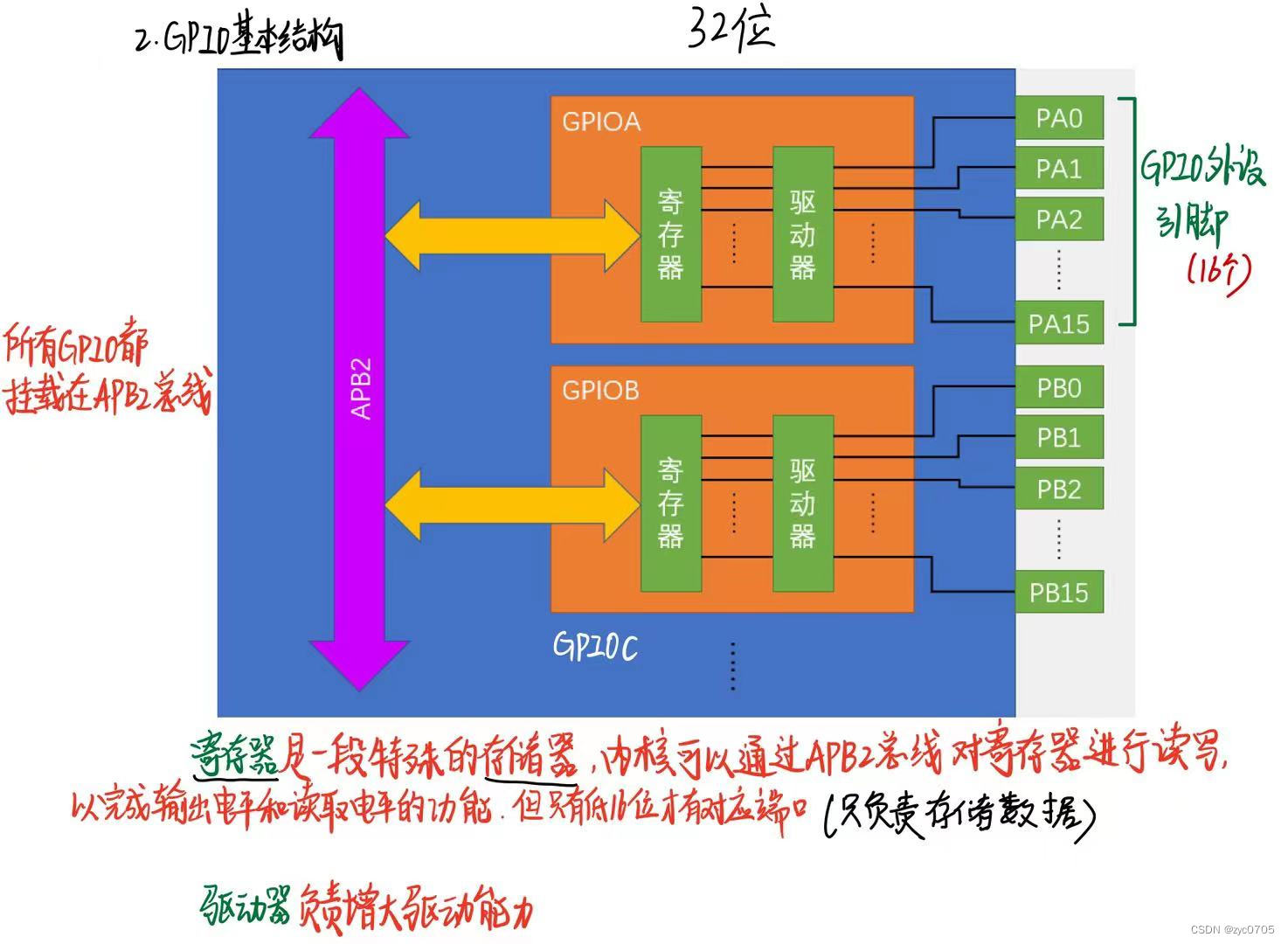
所有的 GPIO 都是挂载在 ABP2 总线结构上的
每个 GPIOX 外设有 16 个引脚,编号从 0~15,比如GPIOA 的第0引脚称为 PAO
每个 GPIO 模块内,主要包含了寄存器和驱动器这些东西,内核可以通过 APB2 总线对寄存器进行读写。
stm32 是32位单片机,所以寄存器是32位,GPIO模块的寄存器只有低 16 对应IO 引脚
其中的驱动器是用来增加信号的驱动能力,比如电灯操作
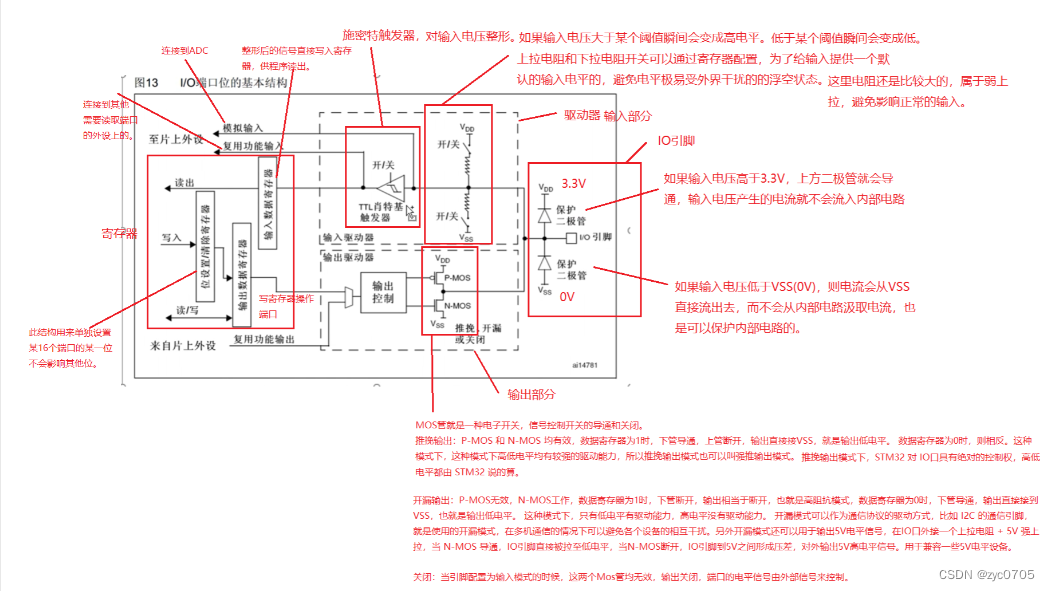
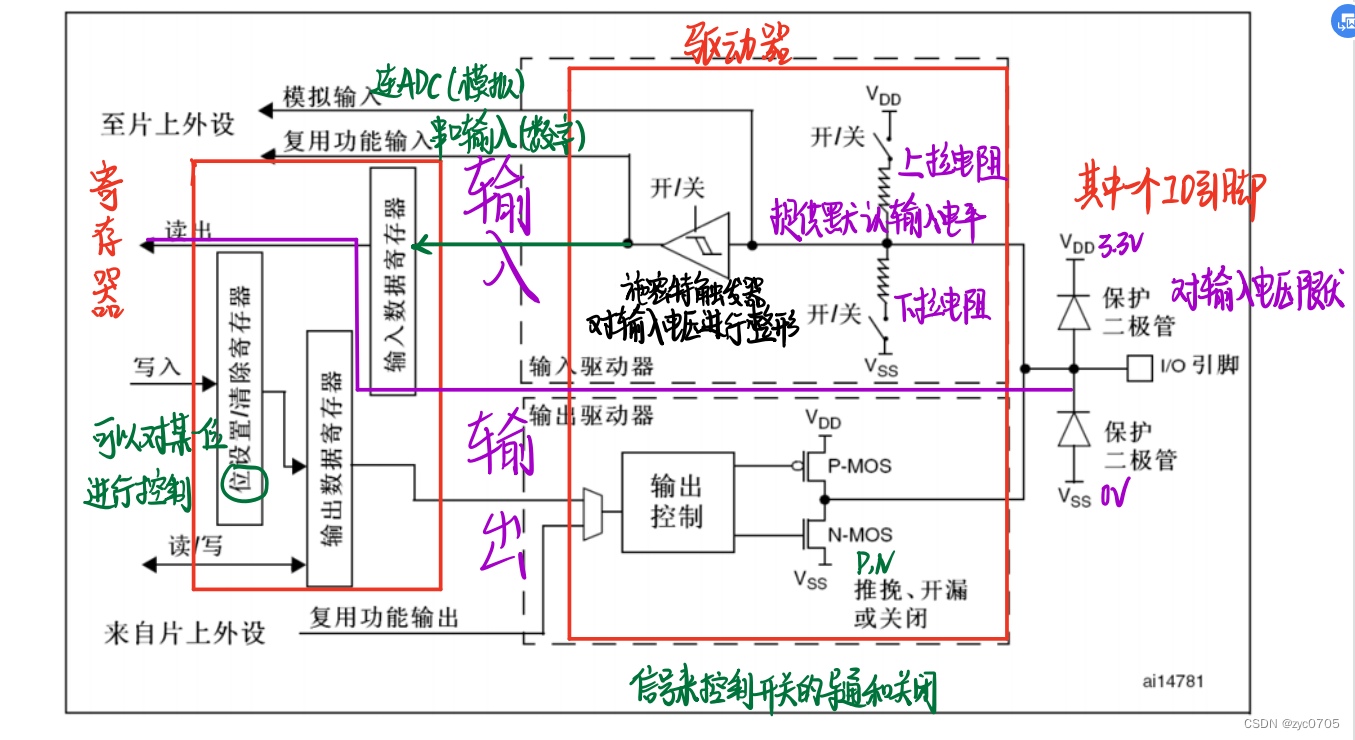
三、 (重要)GPIO 位结构电路
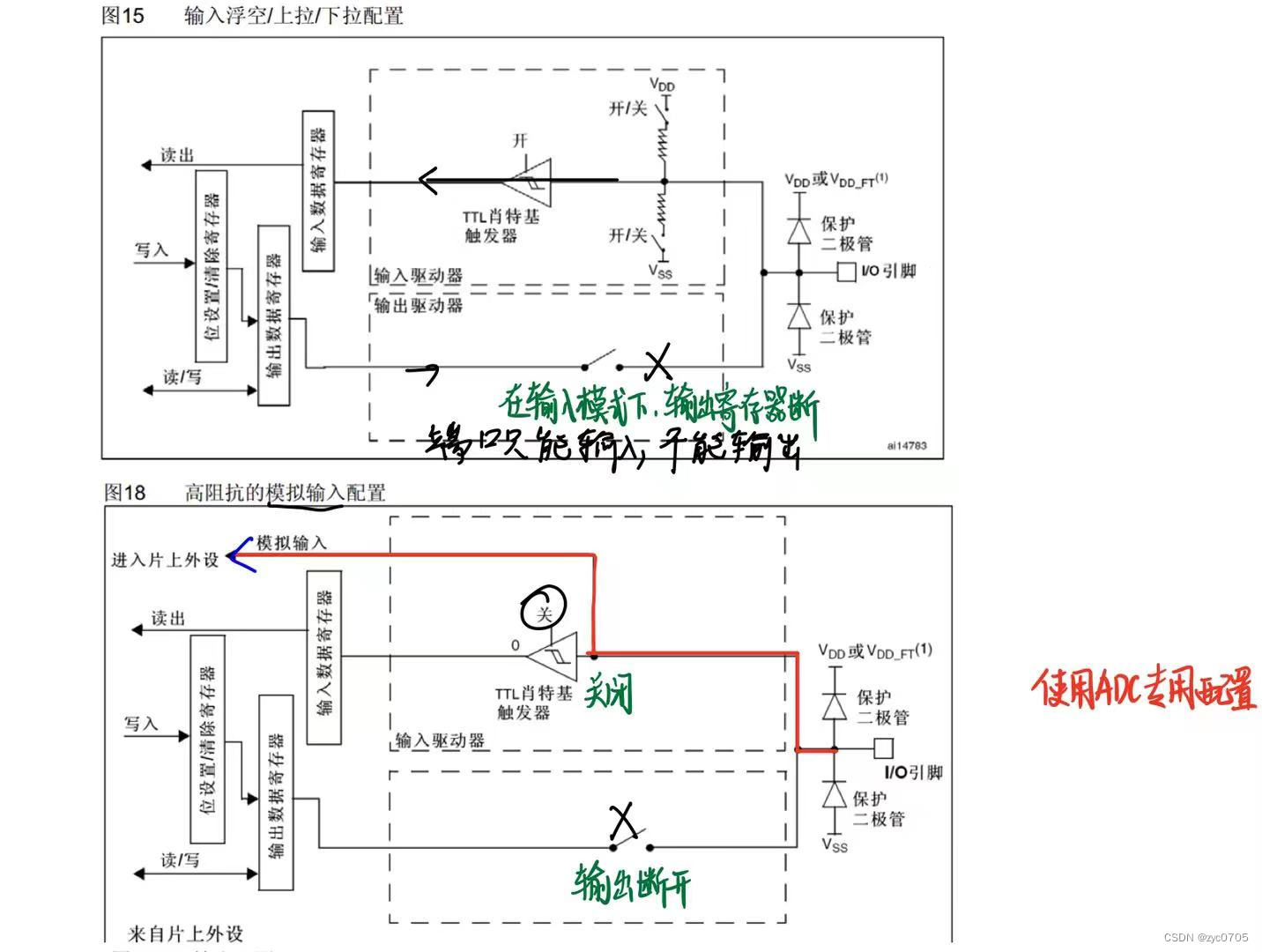
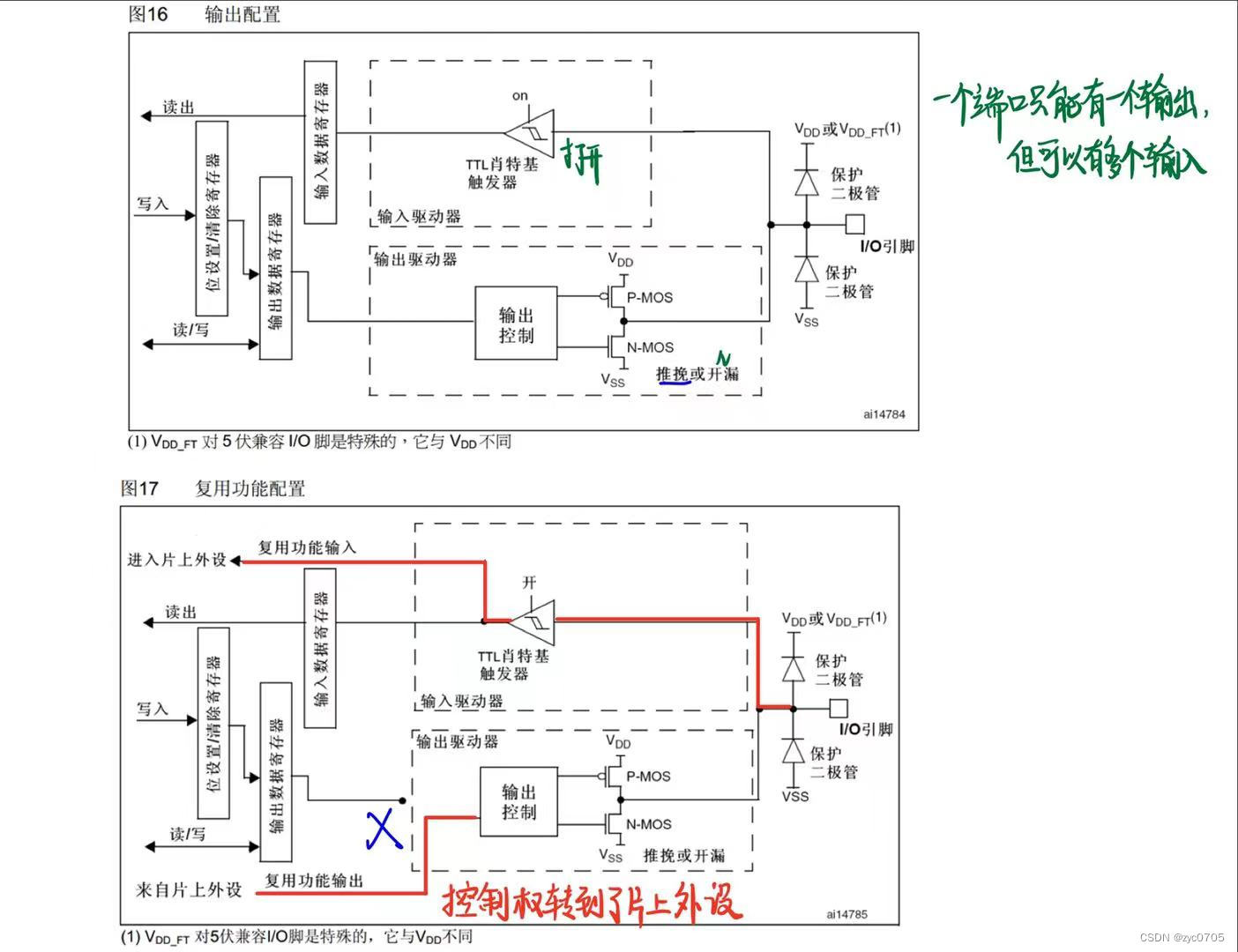
 四、GPIO模式
四、GPIO模式
 五、外设GPIO配置
五、外设GPIO配置
 六、LED和蜂鸣器模块
六、LED和蜂鸣器模块
七、外设硬件电路
 GPIO在推挽输出模式下,高低电平均有较强的驱动能力,但在单片机里,一般用第一种,因为使用高电平弱驱动 ,低电平强驱动的规则
GPIO在推挽输出模式下,高低电平均有较强的驱动能力,但在单片机里,一般用第一种,因为使用高电平弱驱动 ,低电平强驱动的规则
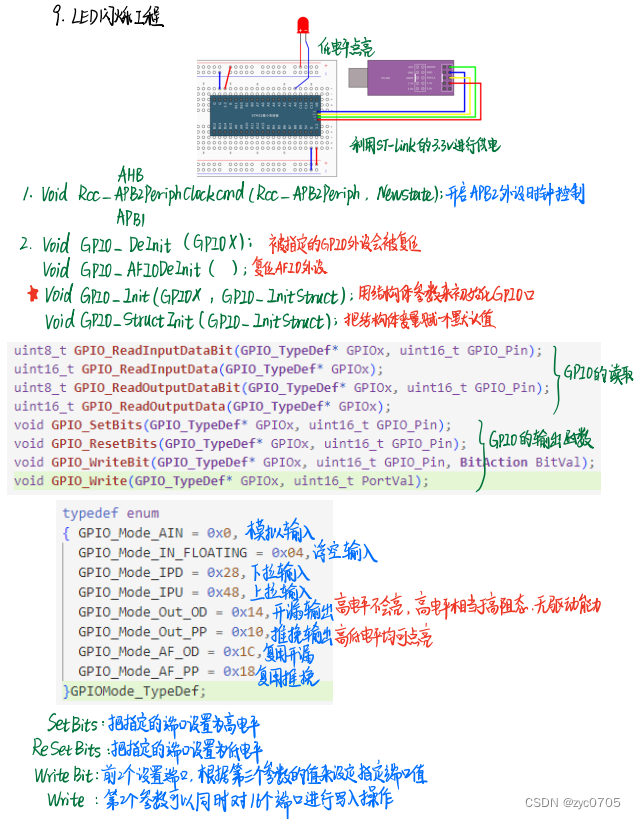
八、LED闪烁电路接线:
九、主要程序:
1、第一步:使用RCC初始化GPIO时钟
2、第二步:使用GPIO_Init函数初始化GPIO
3、第三步设置高低电平
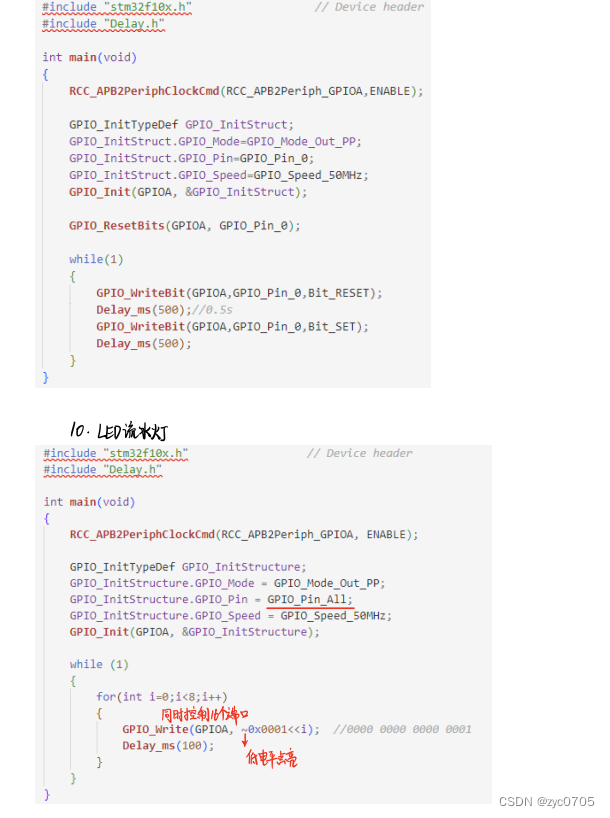
1、点亮一个灯(低电平亮)(LED连接PA0口)
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//使用RCC初始化GPIO时钟
//使用GPIO_Init函数初始化GPIO
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //点灯通用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //用的是GPIOA外设的0号引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //50兆hz的速度
//用结构体的函数初始化GPIO口
GPIO_Init(GPIOA,&GPIO_InitStructure); //第二个参数为指向结构体的指针,故传地址
GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_SET);
while(1)
{
GPIO_ResetBits(GPIOA,GPIO_Pin_0);
Delay_ms(500);
GPIO_SetBits(GPIOA,GPIO_Pin_0);
Delay_ms(500);
GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_RESET);
//加两个延时函数
Delay_ms(500);//毫秒延时函数(参数500)
GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_SET);//熄灭LED
Delay_ms(500);//毫秒延时函数(参数500)
GPIO_WriteBit(GPIOA,GPIO_Pin_0,(BitAction)0);
Delay_ms(500);//毫秒延时函数(参数500)
//加两个延时函数
GPIO_WriteBit(GPIOA,GPIO_Pin_0,(BitAction)1);
Delay_ms(500);
}
}2、流水灯(低电平亮)(LED连接PA0~PA6)
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All; //初始化所有端口 配置为推挽输出模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_SET);
while(1)
{
GPIO_Write(GPIOA,~0x0001); //0000 0000 0000 0001
Delay_ms(500);
GPIO_Write(GPIOA,~0x0002); //0000 0000 0000 0010
Delay_ms(500);
GPIO_Write(GPIOA,~0x0004); //0000 0000 0000 0100
Delay_ms(500);
GPIO_Write(GPIOA,~0x0008); //0000 0000 0000 1000
Delay_ms(500);
GPIO_Write(GPIOA,~0x0010); //0000 0000 0001 0000
Delay_ms(500);
GPIO_Write(GPIOA,~0x0020); //0000 0000 0010 0000
Delay_ms(500);
GPIO_Write(GPIOA,~0x0040); //0000 0000 0100 0000
Delay_ms(500);
GPIO_Write(GPIOA,~0x0080); //0000 0000 1000 0000
Delay_ms(500);
}
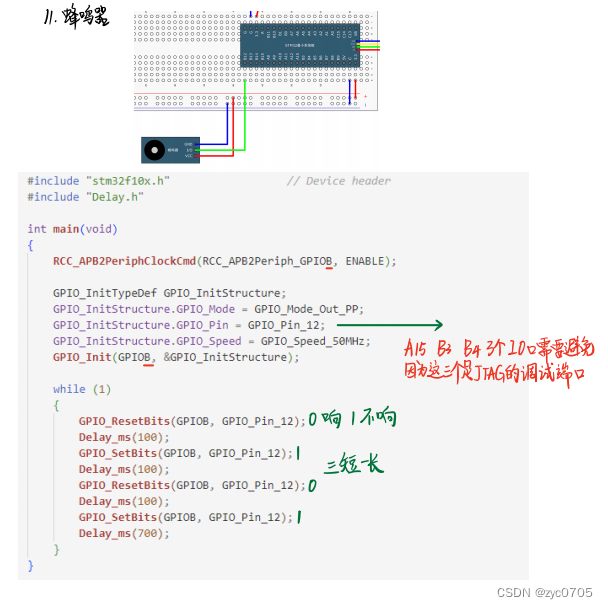
} 3、蜂鸣器(低电平的时候响)(蜂鸣器接口为PB12)
3、蜂鸣器(低电平的时候响)(蜂鸣器接口为PB12)
#include "stm32f10x.h" // Device header
#include "Delay.h"
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
while(1)
{
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
Delay_ms(100);
GPIO_SetBits(GPIOB,GPIO_Pin_12);
Delay_ms(100);
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
Delay_ms(100);
GPIO_SetBits(GPIOB,GPIO_Pin_12);
Delay_ms(700);
}
}十、下面是程序详解 :来自于博主的笔记: