可分离滤波器核
空间滤波器核是一个二维矩阵,若它能够表示为两个一维矩阵的乘积时,则表示该滤波器核是可分离的。
例如,一个3x3的核,
w
=
[
1
1
1
1
1
1
1
1
1
]
w=\begin{bmatrix} 1 & 1 & 1\\ 1 & 1& 1\\ 1 & 1& 1\\ \end{bmatrix}
w=
111111111
它可以表示为两个一维矩阵的乘积
c
=
[
1
1
1
]
c=\begin{bmatrix} 1 & 1 & 1\\ \end{bmatrix}
c=[111]
r
=
[
1
1
1
]
r=\begin{bmatrix} 1 & 1 & 1\\ \end{bmatrix}
r=[111]
即
w
=
c
r
T
w=cr^T
w=crT
性质
可分离核的重要性是卷积结合律性质导致的计算优势,如果有一个核
w
w
w,它可以分为两个简单的核并满足
w
=
w
1
∗
w
2
w=w_1*w_2
w=w1∗w2,则其满足
w
∗
f
=
(
w
1
∗
w
2
)
∗
f
=
(
w
2
∗
w
1
)
∗
f
=
w
2
∗
(
w
1
∗
f
)
=
(
w
1
∗
f
)
∗
w
2
w*f=(w_1*w_2)*f=(w_2*w_1)*f=w_2*(w_1*f)=(w_1*f)*w_2
w∗f=(w1∗w2)∗f=(w2∗w1)∗f=w2∗(w1∗f)=(w1∗f)∗w2
对于一个大小为
M
∗
N
M*N
M∗N的图像与大小为
m
∗
n
m*n
m∗n的核实现卷积,需要
M
N
m
n
MNmn
MNmn次加法和乘法,如果核是可分离的,则需要
M
N
(
m
+
n
)
MN(m+n)
MN(m+n)次,可加速计算。
必要条件
要确定一个核是否可分离,只需要确定其秩是否为1。 因此确定某个矩阵的秩为1后,能够计算其两个分离的一维核,步骤如下
- 在核中找到任意一个非零元素,并将其表示为E;
- 找他该元素所在的行和列,表示为 c , r c,r c,r;
- 可以得出两个一维核为 c c c和 r / E r/E r/E;
示例
以x方向上的Sobel滤波核进行性能测试,比较 M N m n MNmn MNmn以及 M N ( m + n ) MN(m+n) MN(m+n)的处理时间,并与自带opencv 的cv::filter2D与cv::Sobel算子进行比较滤波效果。
int main()
{
//x方向的Sobel核
Mat kernel = (Mat_<char>(3, 3) <<
-1, 0, 1,
-2, 0, 2,
-1, 0, 1);
const char* imageName = ".....";
Mat src = imread(imageName, IMREAD_GRAYSCALE);
Mat srcBorder;
copyMakeBorder(src, srcBorder, kernel.cols / 2, kernel.cols / 2, kernel.rows / 2, kernel.rows / 2, cv::BORDER_CONSTANT);//填充边缘
clock_t start, end;
//1.MNmn
Mat dst(src.rows, src.cols, CV_8UC1);
start = clock();
int sum = 0;
for (int i = 1;i <= dst.rows;i++)
{
for (int j = 1;j <= dst.cols;j++)
{
sum = 0;
for (int m = 0;m < kernel.rows;m++)
{
for (int n = 0;n < kernel.cols;n++)
{
sum += (int)(srcBorder.ptr<uchar>(i + m - 1)[j + n - 1] * kernel.ptr<char>(m)[n]);
}
}
dst.ptr<uchar>(i - 1)[j - 1] = (uchar)(sum < 0 ? 0 : (sum > 255 ? 255 : sum));
}
}
end = clock();
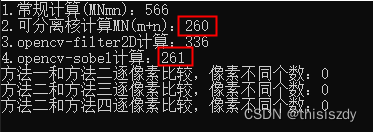
std::cout << "1.常规计算(MNmn):" << end - start << std::endl;
//2.可分离滤波计算
Mat _src2(src.rows + kernel.rows / 2 + 1, src.cols + kernel.cols / 2 + 1, CV_32SC1);
_src2 = Scalar::all(0);
Mat dst2(src.rows, src.cols, CV_8UC1);
start = clock();
//分离卷积核
char kernelRow[3] = { 1,0,-1 };
char kernelCol[3] = { -1,-2,-1 };
for (int i = 1;i <= dst2.rows;i++)
{
for (int j = 1;j <= dst2.cols;j++)
{
sum = 0;
for (int m = 0;m < 3;m++)
{
sum += (int)(srcBorder.ptr<uchar>(i)[j + m - 1] * kernelRow[m]);
}
_src2.ptr<short>(i)[j] = sum;
}
}
for (int i = 1;i <= dst2.rows;i++)
{
for (int j = 1;j <= dst2.cols;j++)
{
sum = 0;
for (int n = 0;n < 3;n++)
{
sum += (int)(_src2.ptr<short>(i + n - 1)[j] * kernelCol[n]);
}
dst2.ptr<uchar>(i - 1)[j - 1] = (uchar)(sum < 0 ? 0 : (sum > 255 ? 255 : sum)); //防止溢出。opencv中使用内联函数saturate_cast<T>()
}
}
end = clock();
std::cout << "2.可分离核计算MN(m+n):" << end - start << std::endl;
//3.opencv-filter2D计算
Mat dst3;
start = clock();
cv::filter2D(src, dst3, -1, kernel, Point(-1, -1), 0.0, BORDER_CONSTANT);
end = clock();
std::cout << "3.opencv-filter2D计算:" << end - start << std::endl;
//4.opencv-sobel计算
Mat dst4;
start = clock();
cv::Sobel(src, dst4, -1, 1, 0, 3, 1.0, 0.0, BORDER_CONSTANT);
end = clock();
std::cout << "4.opencv-sobel计算:" << end - start << std::endl;
// 效果比较
Mat findzero1 = dst2 != dst4; //方法一和方法二比较效果
Mat findzero2 = dst2 != dst4; //方法二和方法三比较效果
Mat findzero3 = dst2 != dst4; //方法二和方法四比较效果
vector<cv::Point> veczero1;
vector<cv::Point> veczero2;
vector<cv::Point> veczero3;
cv::findNonZero(findzero1, veczero1);
cv::findNonZero(findzero2, veczero2);
cv::findNonZero(findzero3, veczero3);
int num1 = veczero1.size();
int num2 = veczero2.size();
int num3 = veczero3.size();
std::cout << "方法一和方法二逐像素比较,像素不同个数:" << num1 << std::endl;
std::cout << "方法二和方法三逐像素比较,像素不同个数:" << num2 << std::endl;
std::cout << "方法二和方法四逐像素比较,像素不同个数:" << num3 << std::endl;
system("pause");
return 0;
}
计算结果显示,可分离核计算比常规计算快一倍左右,与OpenCV的sobel算子处理时间相当。