文章目录
- 【人工智能】— 有信息搜索、最佳优先搜索、贪心搜索、A*搜索
- 无/有信息的搜索
- Informed Search Algorithms
- Best-first search(最佳优先搜索)
- Greedy Search
- A* Search
- 解释说明A*搜索是代价最优的和完备的
- 对搜索等值线如何理解
【人工智能】— 有信息搜索、最佳优先搜索、贪心搜索、A*搜索
无/有信息的搜索
- Uninformed search无信息的搜索:除了问题中提供的定义之外没有任何关于状态的附加信息。
- Informed search有信息的搜索:在问题本身的定义之外还可利用问题的特定知识。
- 无论任何情况下,与无信息搜索策略相比,使用好的有信息的启发式搜索可以节省大量的时间和空间。
- 有信息搜索又叫做启发式搜索,顾名思意,这种搜索方法和启发式函数
h(n)有着密切的关系。而h(n)就是有信息搜索的关键信息。这里的有信息指的是所求解问题之外的,但是与求解问题相关的特定信息或知识。
Informed Search Algorithms
- 评价函数(evaluation function,
f(n)) 从当前结点出发根据评价函数来选择下一结点。 - 启发函数(heuristic function,
h(n))从结点n到目标结点之间所形成的路径的最小代价值。 - 启发函数并不唯一,在罗马尼亚问题中,启发函数使用的是两个城市之间的直线距离即欧氏距离。这里作者并未考虑地形因素的影响。
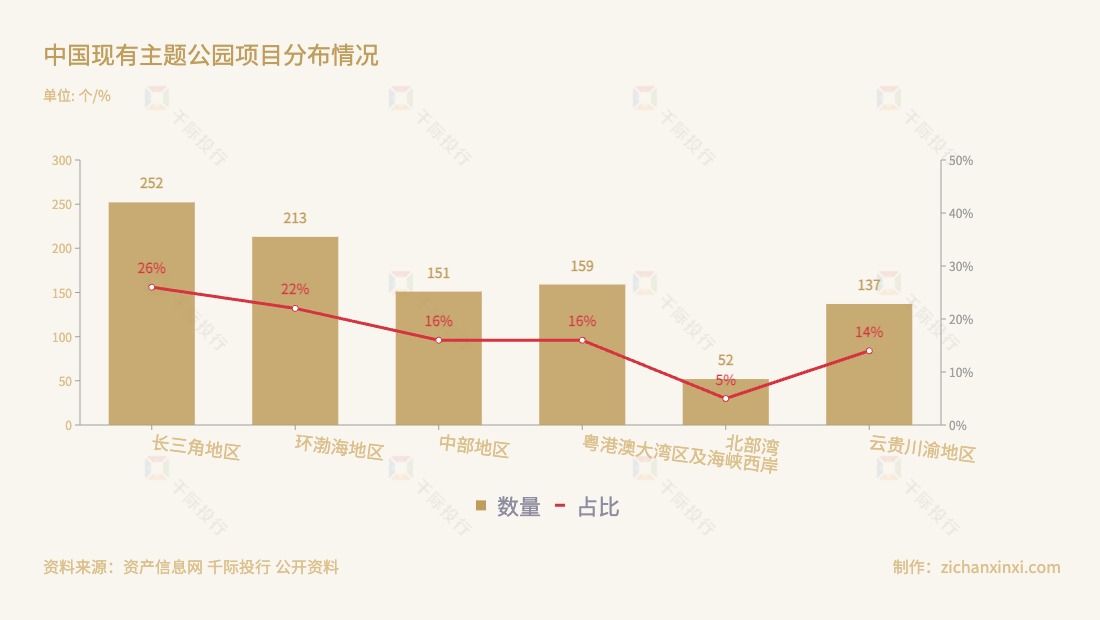
- 在启发函数的选择中,我们还可以以公路里程或者花费的时间作为启发函数。下表即为各个城市距离bucharest的直线距离,即有信息搜索中的关键信息。

- 代价一致搜索 Uniform Cost:
- UCS的原理:一致代价搜索总是扩展路径消耗最小的节点
N。N点的路径消耗等于前一节点N-1的路径消耗加上N-1到N节点的路径消耗 - 优点:UCS是完备的和可以取得最优解的!
- 缺点:
- 会扩展所有“方向”
- 没有关于目标状态的信息
- 为什么不是有信息搜索:
- 定义两个函数
g(x)为从根节点到x节点的代价总和h(x)为从x节点到目标节点的估计代价总和
- 代价一致搜索 (Uniform Cost Search or Dijkstra search)
f(x) = g(x) - 贪心搜索 (Greedy Search)
f(x) = h(x) - A星搜索 (A* Search)
f(x) = g(x) + h(x)
- 定义两个函数
- 所以,因为
g(x)是问题的定义获取的信息,不是跟目标状态有关的信息,所以代价一致搜索不是有信息搜索
- UCS的原理:一致代价搜索总是扩展路径消耗最小的节点
Best-first search(最佳优先搜索)
- 思想:对每个节点使用评价函数
f(n)- 评估“可取性”
- 扩展最理想的未扩展节点
- 特例:
- 贪婪搜索
- A*搜索
Greedy Search
- h S L D ( n ) h_{SLD}(n) hSLD(n)= 从 n n n到布加勒斯特的直线距离
- Greedy search expands the node that appears to be closest to goal(试图扩
展离目标节点最近的点)

- 完备性:不一定,可能会陷入死循环,例如:with Oradea as goal,Iasi → Neamt → Iasi → Neamt →…
- 在具有重复状态检查的有限空间可以实现完备性
- b:分支因子、d:解深度、m:最大深度
- 时间复杂度: O ( b m ) O(b^m) O(bm),但一个好的启发式方法可以带来显著的改进
- 空间复杂度: O ( b m ) O(b^m) O(bm),将所有节点保留在内存中
- 最优解:不能保证,例如:

A* Search
-
评估函数:Evaluation function f ( n ) = g ( n ) + h ( n ) f(n) = g(n) + h(n) f(n)=g(n)+h(n)
-
g(n)= cost so far to reach n —到达节点n的耗散 -
h(n)= estimated cost to goal from n —启发函数:从节点n到目标节点的最低耗散路径的耗散估计值 -
f(n)= estimated total cost of path through n to goal —经过节点n的最低耗散的估计函数 -
h ( n ) ≤ h ∗ ( n ) h(n) ≤ h^*(n) h(n)≤h∗(n) where h ∗ ( n ) h^*(n) h∗(n) is the true cost from n.
- (Also require h(n) ≥ 0, so h(G) = 0 for any goal G. )
-
E.g., h S L D ( n ) h_{SLD(n)} hSLD(n)never overestimates the actual road distance (SLD: Straight-Line
Distance) -
举例:
-





-
A*启发式
h(n)是可采纳的:如果对于每个节点n, h ( n ) ≤ h ∗ ( n ) h(n)≤h^*(n) h(n)≤h∗(n),其中 h ∗ ( n ) h^*(n) h∗(n)是从n达到目标状态的真实成本 -
An admissible heuristic never overestimates the cost to reach the goal(从不会过高估计到达目标的耗散), i.e., it is optimistic(乐观的)
-
示例: h S L D ( n ) h_{SLD}(n) hSLD(n)(永远不会高估实际道路距离
-
定理:如果
h(n)是可采纳的,则使用TREE-SEARCH的A*是最优的- 如果
h(n)是一致的,则使用GRAPH-SEARCH的A*是最优的
- 如果
-
提出可采纳的启发式方法是在实践中使用A*所涉及的大部分内容
-
完备性:满足(除非存在无限多个
f≤f(G)的节点) -
时间复杂度:A*算法对于任何给定的启发函数都是效率最优,但仍然是指数级
-
空间复杂度:要保存所有结点在内存中
-
最优解:可以取得
-

解释说明A*搜索是代价最优的和完备的
- 首先要先定义出什么是代价最优。这里的最优是指不存在另外一个解法能得到比A*算法所求得解法具有更小开销代价。
- 是否代价最优,取决于启发式函数
h(n)的一些性质,其中的一个关键性质为可采纳性(admissibility),一个具备可采纳性的启发式函数永远不会高估到达某个目标的代价。 - 专门针对启发函数而言,即启发函数不会过高估计(over-estimate)从节点n到目标结点之间的实际开销代价(即小于等于实际开销)。如可将两点之间的直线距离作为启发函数,从而保证其可容。
- 另外一个关键性质为一致性(consistency)。假设节点
n的后续节点是n',则从n到目标节点之间的开销代价一定小于从n到n'的开销再(单调性)加上从n'到目标节点之间的开销,满足以下条件: h ( n ) ≤ c o s t ( n , a , n ′ ) + h ( n ′ ) h(n)\le cost(n,a,n')+h(n') h(n)≤cost(n,a,n′)+h(n′) - 这里
n'是n经过行动a所抵达的后续节点,c(n,a,n')指n'和n之间的开销代价。则启发式函数h(n)是一致的。 - A*搜索算法保持最优的条件:启发函数具有可容性(admissible)和一致性 (consistency),如下图所示。

- 将直线距离作为启发函数
h(n),则启发函数一定是可容的,因为其不会高估开销代价。g(n)是从起始节点到节点n的实际代价开销,且 f ( n ) = g ( n ) + h ( n ) f(n)=g(n)+h(n) f(n)=g(n)+h(n),因此 f ( n ) f(n) f(n)不会高估经过节点n路径的实际开销。 -
h
(
n
)
≤
c
(
n
,
a
,
n
′
)
+
h
(
n
′
)
h(n)≤c(n,a,n')+h(n')
h(n)≤c(n,a,n′)+h(n′)构成了三角不等式。这里节点
n、节点n'和目标结点Goal之间组成了一个三角形。 - 如果存在一条经过节点
n',从节点n到目标结点Goal的路径,其代价开销小于h(n),则破坏了h(n)是从节点n到目标结点Goal所形成的具有最小开销代价的路径这一定义。
对搜索等值线如何理解
搜索等值线的概念更接近于地理上的等高线。如下图所示,在标记为400的等值线内,有
f
(
n
)
=
g
(
n
)
+
h
(
n
)
≤
400
f(n)=g(n)+h(n)≤400
f(n)=g(n)+h(n)≤400。由于A*搜索扩展的是f最小的边界结点,因此它的等值线是从初始结点以扇形向外扩展的,而一致代价搜索因为只有g(n),因此是以圆形向外扩展的。

- 这里设
C是f(n)的最优解,那么对于满足f(n)<C的结点n,称之为必然扩展结点(surely expanded node), - A*搜索可能会选出到达目标状态之前,恰好在等值线上面的点,即满足
f(n)=C的结点。A搜索不会扩展f(n)>C的结点,因此可以得出结论:- 具有一致启发性函数的A搜索是效率最优的。
| 情况 | 函数 | 结果 |
|---|---|---|
| h ^ ( n ) = 0 \hat h(n)=0 h^(n)=0 ,即 f ^ ( n ) = g ^ ( n ) \hat f(n)=\hat g(n) f^(n)=g^(n) | A*算法退化为Dijkstra算法 | 保证能找到最短路径 |
| h ^ ( n ) ≤ \hat h(n)\leq h^(n)≤ 实际代价 | h ^ ( n ) \hat h(n) h^(n)越小,A*扩展的节点越多,运行的越慢 | 保证能找到一条最短路径,但运算更快了 |
| h ^ ( n ) = \hat h(n)= h^(n)= 实际代价 | 仅寻找最佳路径,而不扩展任何别的节点 | 保证能找到一条最短路径,并且运算非常快 |
| h ^ ( n ) > \hat h(n)> h^(n)> 实际代价 | 寻找最佳路径且扩展别的任何节点 | 不能保证找到一条最短路径,但运算更快了 |
| h ^ ( n ) > > g ^ ( n ) \hat h(n)>>\hat g(n) h^(n)>>g^(n) | A*算法退化为BFS算法 | 不能保证找到一条最短路径,但运算非常快 |