1、动作概述
讲完了 服务 之后,接下来就是通信的第三种机制,动作。在上节我们知道服务的应用场景是需要在有限时间内完成,而对于一些比较复杂的任务,需要耗时比较长,甚至是不确定时间的时候,就需要用到动作这种通信方式了。
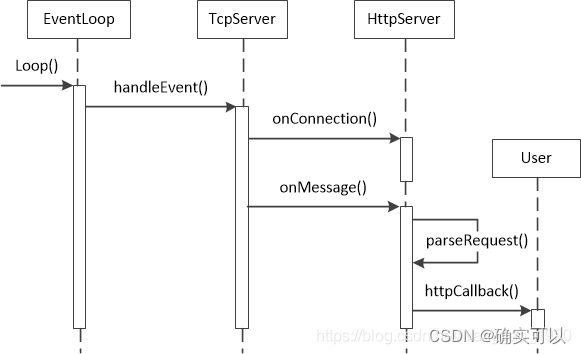
在原理上,动作使用 话题 来实现,而且引入了反馈来提供操作的进度信息,也就是说在执行任务的过程中,可以周期性得到反馈,帮助我们了解运行到哪个步骤了,本质上相当于规定了一系列话题(目标,反馈、结果等)的组合使用方法的高层协议。
动作的定义和使用跟服务差不多,稍微复杂一点,但是却非常强大和灵活。
2、动作的定义
创建一个动作,里面的格式分三部分:目标、结果、反馈,同样使用三个短横线进行隔开,跟前面介绍的服务(请求和响应,也就是输入和输出)类似,只不过多了一个反馈消息项,同样的在定义好动作之后进行编译,.action文件也会被打包为一个消息类型。
2.1、.action定义
依然先来看下动作的定义,后缀名是.action,先来到工作区的test包,新建action目录
cd ~/catkin_ws/src/test
mkdir action
cd action我们来定义一个定时器Timer.action,进行倒计时,并在倒计时停止时发出信号,在这个过程中将定期告诉我们剩余的时间,计时结束之后,返回总时长。
gedit Timer.actionduration time_to_wait
---
duration time_elapsed
uint32 updates_sent
---
duration time_elapsed
duration time_remaining
目标goal:客户端发送的等待总时长
结果result:服务端发送的等待时长以及更新次数
反馈feedback:服务端周期性反馈,消逝的时长和剩余时长
加个执行权限:chmod u+x Timer.action
2.2、修改CMakeLists.txt
动作文件定义好了之后,同样需要将编译的相关依赖项给写出来
cd ~/catkin_ws/src/test
gedit CMakeLists.txtfind_package增加actionlib_msgs
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation actionlib_msgs)
告知catkin需要编译的动作文件
add_action_files(
DIRECTORY action
FILES Timer.action
)
generate_messages显式列出actionlib_msgs消息依赖
generate_messages(DEPENDENCIES actionlib_msgs std_msgs)
catkin_package中添加actionlib_msgs依赖
catkin_package(CATKIN_DEPENDS message_runtime actionlib_msgs)
2.3、修改package.xml
cd ~/catkin_ws/src/test
gedit package.xml添加actionlib_msgs
<build_depend>actionlib_msgs</build_depend>
<exec_depend>actionlib_msgs</exec_depend>2.4、编译
相关准备做好了之后,就对其进行编译,创建该动作实际使用的代码以及类定义:
cd ~/catkin_ws
catkin_make其中对于编译也可以指定Python版本:
cd ~/catkin_ws
catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python2cd ~/catkin_ws
catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3当然如果在某个版本里面没有安装catkin_pkg将会报错:
ImportError: "from catkin_pkg.package import parse_package" failed: No module named 'catkin_pkg'
Make sure that you have installed "catkin_pkg", it is up to date and on the PYTHONPATH.
比如本人在Python3里面没有安装,重新安装如下:
sudo apt install python3-pip
pip3 install --user catkin_pkg
pip3 install --user empy查看下,在两个版本下面都安装好了catkin_pkg
sudo find / -name "catkin_pkg"
/usr/lib/python2.7/dist-packages/catkin_pkg
/home/yahboom/.local/lib/python3.6/site-packages/catkin_pkg编译成功之后,我们来查看下生成了哪些消息文件:
ls ~/catkin_ws/devel/share/test/msg
TimerActionFeedback.msg TimerAction.msg TimerFeedback.msg TimerResult.msg
TimerActionGoal.msg TimerActionResult.msg TimerGoal.msg这些msg文件里面都是这些动作所定义的类型,我们看下其详细情况,截图如下:

如果指定Python版本去编译,将在对应版本下面,将上面对应的.msg消息文件生成对应的类的定义文件:
cd ~/catkin_ws/devel/lib/python2.7/dist-packages/test/msg
cd ~/catkin_ws/devel/lib/python3/dist-packages/test/msgls查看下生成了哪些文件(其中_Complex.py是前面话题章节自定义的消息类型):
_Complex.py __init__.py _TimerActionFeedback.py _TimerAction.py _TimerFeedback.py _TimerResult.py
_Complex.pyc __init__.pyc _TimerActionGoal.py _TimerActionResult.py _TimerGoal.py从这些生成的目录与文件来看,再次说明了这个动作的本质是话题,而话题本质又是类型的消息流。
3、动作服务器
动作的相关类都已生成好了,接下来就写动作服务器,动作跟话题和服务一样,都使用回调机制,即回调函数会在收到消息时被唤醒和调用。这里我们就直接使用来自actionlib里面的SimpleActionServer类来简化编写过程。
我们只需要定义接收到目标时的回调函数,而回调函数会根据目标来操作定时器,并在操作结束后返回一个结果,除了目标和结果,到后面我们会将反馈再加上,先来看一个基本的动作服务。
cd ~/catkin_ws/src/test/src
gedit action_server1.py#!/usr/bin/env python
import rospy
import time
import actionlib
from test.msg import TimerGoal,TimerResult,TimerAction
def do_timer(goal):
start_time = time.time()
time.sleep(goal.time_to_wait.to_sec())
result = TimerResult()
result.time_elapsed = rospy.Duration.from_sec(time.time()-start_time)
result.updates_sent = 0
server.set_succeeded(result)
rospy.init_node('timer_action_server')
server = actionlib.SimpleActionServer('timer',TimerAction,do_timer,False)
server.start()
rospy.spin()添加执行权限:chmod u+x action_server1.py
首先导入相关类以及Timer.action自动生成的类,然后定义回调函数,其中参数goal本质是一个TimerGoal类型的对象,goal中的time_to_wait对象返回的是duration类型,所以需要转成to_sec()秒,反过来需要得到持续时间,这里的time_elapsed是Duration类型,使用from_sec()转换。最后就是将结果result作为参数,调用set_succeeded(),告诉SimpleActionServer已成功执行了目标。
我们来看下SimpleActionServer构造函数:
__init__(self, name, ActionSpec, execute_cb=None, auto_start=True)name:动作服务器的名称
ActionSpec:动作类型
execute_cb:回调函数在单独的线程中调用,接收到一个新的目标,允许用户阻塞回调,添加一个执行回调也会使目标回调失效。
auto_start:告诉ActionServer是否在它出现时立即开始发布,这里应该总是设置为False以出现竞争条件的问题,而导致一些错误的发生,然后显式调用start()来启动动作服务器。那么为什么没有默认为Fasle,这里可能是因为被发现问题时,已经有很多代码都依赖这个默认行为,导致修改变得非常麻烦了。
4、启动检查
动作服务器编写完成之后,我们来检查下是否正常工作。
首先启动:roscore
运行动作服务器:rosrun test action_server1.py
查看话题列表:rostopic list
/rosout
/rosout_agg
/timer/cancel
/timer/feedback
/timer/goal
/timer/result
/timer/status
正确显示出了timer名字空间下的话题,一共有5个,我们来查看一个话题
rostopic info /timer/goal
'''
Type: test/TimerActionGoal
Publishers: None
Subscribers:
* /timer_action_server (http://YAB:42723/)
'''类型是TimerActionGoal,我们来查看下其信息
rosmsg show TimerActionGoal
'''
[test/TimerActionGoal]:
std_msgs/Header header
uint32 seq
time stamp
string frame_id
actionlib_msgs/GoalID goal_id
time stamp
string id
test/TimerGoal goal
duration time_to_wait
'''在这里也验证了前面说的goal是TimerGoal的类型,里面包含了time_to_wait字段,其余部分是服务器和客户端用来追踪动作执行状态的,只不过在目标传入服务器端的回调函数之前,这些信息都将被去除,最后剩下的就是这个TimerGoal消息。我们查看下TimerGoal:
rosmsg show TimerGoal
'''
[test/TimerGoal]:
duration time_to_wait
'''从这些打印的结果来看,如果你使用的是actionlib包中的一些程序库,就不需要去访问这些名字里面含有Action的类型,单纯的Goal、Result、Feedback就完全够用了。
5、动作客户端
服务端我们定义好了,接下来我们定义客户端,向服务器发送一个目标,并且等待结果的到来。
cd ~/catkin_ws/src/test/src
gedit action_client1.py#!/usr/bin/env python
import rospy
import actionlib
from test.msg import TimerAction,TimerGoal,TimerResult
rospy.init_node('timer_action_client')
client = actionlib.SimpleActionClient('timer',TimerAction)
client.wait_for_server()
goal = TimerGoal()
goal.time_to_wait = rospy.Duration.from_sec(5)
client.send_goal(goal)
client.wait_for_result()
print(client.get_result().time_elapsed.to_sec())添加可执行权限:chmod u+x action_client1.py
客户端的代码,在导入相关模块之后,创建的SimpleActionClient里面的两个参数跟服务端一样。等待动作服务器启动跟前面的服务rospy.wait_for_service类似,这里是rospy.wait_for_server。接下来就是创建目标,构造一个TimerGoal对象,填入我们想要定时器等待的时间,这里设置为5秒,然后就发送给服务器。最后就是等待服务器的处理结果了,如果一切正常,就打印出获取的结果get_result的持续时间。
运行客户端
rosrun test action_client1.py
#5.005053997客户端发送5秒的时间给目标,服务端做一个sleep模拟,这个阻塞时间比请求时间要稍微长点,所以会大于5秒。
6、复杂的动作服务器
对于动作有了基本了解之后,我们就重点关注它的特点,也就是动作跟服务的区别,主要是动作的异步特性,接下来修改上述代码,实现终止目标、处理打断请求和实时反馈等功能,突出动作的优势。
cd ~/catkin_ws/src/test/src
gedit action_server2.py#!/usr/bin/env python
# -*- coding: utf-8
import rospy
import time
import actionlib
from test.msg import TimerAction,TimerGoal,TimerResult,TimerFeedback
def do_timer(goal):
start_time = time.time()
update_count = 0
if goal.time_to_wait.to_sec() > 60:
result = TimerResult()
result.time_elapsed = rospy.Duration.from_sec(time.time()-start_time)
result.updates_sent = update_count
server.set_aborted(result,"超时终止")
return
while (time.time()-start_time) < goal.time_to_wait.to_sec():
if server.is_preempt_requested():
result = TimerResult()
result.time_elapsed = rospy.Duration.from_sec(time.time()-start_time)
result.updates_sent = update_count
server.set_preempted(result,"中断")
return
feedback = TimerFeedback()
feedback.time_elapsed = rospy.Duration.from_sec(time.time()-start_time)
feedback.time_remaining = goal.time_to_wait - feedback.time_elapsed
server.publish_feedback(feedback)
update_count += 1
time.sleep(1)
result = TimerResult()
result.time_elapsed = rospy.Duration.from_sec(time.time()-start_time)
result.updates_sent = update_count
server.set_succeeded(result,"成功完成")
rospy.init_node("timer_action_server2")
server = actionlib.SimpleActionServer('timer',TimerAction,do_timer,False)
server.start()
rospy.spin()加个执行权限:chmod u+x action_server2.py
由于需要提供反馈,所以导入TimerFeedback消息类型,对于请求time_to_wait超过60秒的,显式调用set_aborted来终止当前的目标请求,这个调用会给客户端发送一个消息,告知本次目标已被终止。如果没超时就进入到一个循环,在循环中进行间断的休眠等待,在这个过程中检查是否有发生中断is_preempt_requested等情况,并提供反馈。当休眠时长超过请求目标时长,就退出循环,告诉客户端目标已被成功执行完了。
7、复杂的动作客户端
服务端做了调整之后,我们客户端对其进行测试,比如对反馈进行处理,中断正在执行的目标,以及引发终止等操作:
cd ~/catkin_ws/src/test/src
gedit action_client2.py#!/usr/bin/env python
# -*- coding: utf-8
import rospy
import time
import actionlib
from test.msg import TimerAction,TimerGoal,TimerResult,TimerFeedback
def feedback_cb(feedback):
print("持续时间:%f"%(feedback.time_elapsed.to_sec()))
print("剩余时间:%f"%(feedback.time_remaining.to_sec()))
rospy.init_node('timer_action_client2')
client = actionlib.SimpleActionClient('timer',TimerAction)
client.wait_for_server()
goal = TimerGoal()
goal.time_to_wait = rospy.Duration.from_sec(5)
#goal.time_to_wait = rospy.Duration.from_sec(100)
client.send_goal(goal,feedback_cb=feedback_cb)
time.sleep(3)
client.cancel_goal()
client.wait_for_result()
print("状态码:%d"%(client.get_state()))
print("状态描述:%s"%(client.get_goal_status_text()))
print("持续时间:%f"%(client.get_result().time_elapsed.to_sec()))
print("反馈次数:%d"%(client.get_result().updates_sent))添加执行权限:chmod u+x action_client2.py
查看反馈的话题的信息
rostopic info /timer/feedback
'''
Type: test/TimerActionFeedback
Publishers:
* /timer_action_server (http://YAB:33125/)
Subscribers: None
'''其消息类型是TimerActionFeedback,我们查看下详情
rosmsg show TimerActionFeedback
'''
[test/TimerActionFeedback]:
std_msgs/Header header
uint32 seq
time stamp
string frame_id
actionlib_msgs/GoalStatus status
uint8 PENDING=0
uint8 ACTIVE=1
uint8 PREEMPTED=2
uint8 SUCCEEDED=3
uint8 ABORTED=4
uint8 REJECTED=5
uint8 PREEMPTING=6
uint8 RECALLING=7
uint8 RECALLED=8
uint8 LOST=9
actionlib_msgs/GoalID goal_id
time stamp
string id
uint8 status
string text
test/TimerFeedback feedback
duration time_elapsed
duration time_remaining
'''除了定义的两个持续时间与剩余时间之外,我们还看到了当前的可能状态有10种,主要关注其中三种:PREEMPTED=2、SUCCEEDED=3、ABORTED=4
了解了客户端的一些定义之后,我们来运行测试下(前提是先开启roscore和action_server2.py)

7.1、正常测试
运行客户端:rosrun test action_client2.py
持续时间:0.000023
剩余时间:4.999977
持续时间:1.001364
剩余时间:3.998636
持续时间:2.002950
剩余时间:2.997050
持续时间:3.004577
剩余时间:1.995423
持续时间:4.005102
剩余时间:0.994898
状态码:3
状态描述:成功完成
持续时间:5.007248
反馈次数:5
7.2、终止测试
将时间调到超过60秒,比如100秒
goal.time_to_wait = rospy.Duration.from_sec(100)运行客户端:rosrun test action_client2.py
状态码:4
状态描述:超时终止
持续时间:0.000014
反馈次数:0
7.3、中断测试
将下面代码中的注释去掉:
time.sleep(3)
client.cancel_goal()运行客户端:rosrun test action_client2.py
持续时间:0.000042
剩余时间:4.999958
持续时间:1.002338
剩余时间:3.997662
持续时间:2.005545
剩余时间:2.994455
状态码:2
状态描述:中断
持续时间:3.007982
反馈次数:3
8、小结
节点通信的三种机制就介绍完了,其中本节说的动作机制是ROS中一个功能强大,使用广泛的通信工具。那么在哪些场景选择哪种通信,这里做一个对比:
| 类型 | 场景 |
| 话题 | 接收方有多个的情况,比如传感器的数据,单工通信。 |
| 服务 | 请求/响应的交互式场景,计算时间短,比如询问节点的当前状态 |
| 动作 | 大部分的请求/响应交互式场景,尤其在执行过程中不能立即完成时,比如说导航到一个目标点 |
这里主要是服务和动作有点暧昧,那么这么去理解,在任何时候,当你执行一个任务,想要使用服务的时候,都值得考虑是否使用动作。虽然动作需要写更多的代码,但是比服务强大很多,扩展性也好很多。
另外代码中出现了中文,所以需要加上:# -*- coding: utf-8
在本节,我们新建了两个节点,都开启之后,我们来查看下节点列表
rosnode list
'''
/rosout
/timer_action_server
/timer_action_server2
'''可以看到出现了代码中定义的两个节点。