FPGA教程学习
第十四章 HDMI 输出实验
文章目录
- FPGA教程学习
- 前言
- 实验原理
- 实验过程
- 程序设计
- 时钟模块(video_pll)
- 彩条产生模块(color_bar)
- 配置数据查找表模块(lut_adv7511)
- I2C Master 寄存器配置模块(i2c_config)
- TODO
- 总结
- 参考
前言
- FPGA通过HDMI编码芯片输出彩条。
实验原理
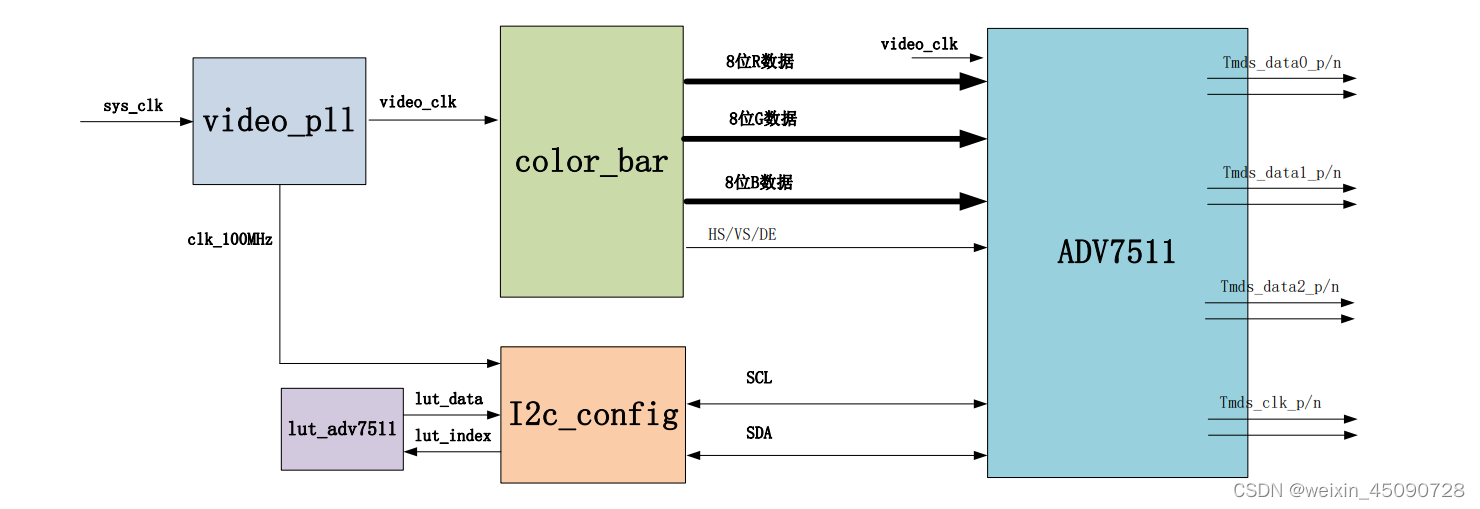
开发板有一个HDMI编码芯片,ADV7511,将 24 位 RGB 编码输出 TMDS 差分信号。
本实验使用其将RGB24视频数据显示出来。
硬件原理图如下:

结合前面,从原理图(或者看手册,这里只是大致分析一下)上可以分析出:
- 编码输入是24位的数据,本实验是RGB
- 编码输出时TMDS 差分信号
- 编码芯片的配置接口是I2C
- HDMI接口上有I2C
实验过程
程序设计
时钟模块(video_pll)
负责产生一个100Mhz的时钟和一个1080P的148.5Mhz的像素时钟。
生成时钟 IP 的方法是点击 Project Manager目录下的 IP Catalog,再选择 FPGA Features and Design->Clocking->Clocking Wizard 图标。然后进行设置即可。
彩条产生模块(color_bar)
是产生 8 种颜色的 VGA 格式的彩条,彩条分别为白、黄、青、绿、紫、红、蓝和黑。产生分辨率为 1920x1080 刷新率为 60Hz 的彩条,也就是所谓的 1080P 的高清视频图像。
视频时序图:

模块要根据这个视频时序去看,用了几个寄存器来计数行场信号。
模块接口参数比较少,输入只有时钟和复位,其他都是输出。这里输出的时序是给编码芯片的。
module color_bar(
input clk, //像素时钟输入,1280x720@60P的像素时钟为74.25
input rst, //复位,高有效
output hs, //行同步、高有效
output vs, //场同步、高有效
output de, //数据有效
output[7:0] rgb_r, //像素数据、红色分量
output[7:0] rgb_g, //像素数据、绿色分量
output[7:0] rgb_b //像素数据、蓝色分量
);
//*************************************************************************\
//==========================================================================
// Description:
// 彩条发生模块
//==========================================================================
// Revision History:
// Date By Revision Change Description
//--------------------------------------------------------------------------
//2013/5/7 1.2 remove some warning
//2013/4/18 1.1 vs timing
//2013/4/16 1.0 Original
//*************************************************************************/
module color_bar(
input clk, //像素时钟输入,1280x720@60P的像素时钟为74.25
input rst, //复位,高有效
output hs, //行同步、高有效
output vs, //场同步、高有效
output de, //数据有效
output[7:0] rgb_r, //像素数据、红色分量
output[7:0] rgb_g, //像素数据、绿色分量
output[7:0] rgb_b //像素数据、蓝色分量
);
/*********视频时序参数定义******************************************/
//parameter H_ACTIVE = 16'd1280; //行有效长度(像素时钟周期个数)
//parameter H_FP = 16'd110; //行同步前肩长度
//parameter H_SYNC = 16'd40; //行同步长度
//parameter H_BP = 16'd220; //行同步后肩长度
//parameter V_ACTIVE = 16'd720; //场有效长度(行的个数)
//parameter V_FP = 16'd5; //场同步前肩长度
//parameter V_SYNC = 16'd5; //场同步长度
//parameter V_BP = 16'd20; //场同步后肩长度
parameter H_ACTIVE = 16'd1920;
parameter H_FP = 16'd88;
parameter H_SYNC = 16'd44;
parameter H_BP = 16'd148;
parameter V_ACTIVE = 16'd1080;
parameter V_FP = 16'd4;
parameter V_SYNC = 16'd5;
parameter V_BP = 16'd36;
parameter H_TOTAL = H_ACTIVE + H_FP + H_SYNC + H_BP;//行总长度
parameter V_TOTAL = V_ACTIVE + V_FP + V_SYNC + V_BP;//场总长度
/*********彩条RGB color bar颜色参数定义*****************************/
parameter WHITE_R = 8'hff;
parameter WHITE_G = 8'hff;
parameter WHITE_B = 8'hff;
parameter YELLOW_R = 8'hff;
parameter YELLOW_G = 8'hff;
parameter YELLOW_B = 8'h00;
parameter CYAN_R = 8'h00;
parameter CYAN_G = 8'hff;
parameter CYAN_B = 8'hff;
parameter GREEN_R = 8'h00;
parameter GREEN_G = 8'hff;
parameter GREEN_B = 8'h00;
parameter MAGENTA_R = 8'hff;
parameter MAGENTA_G = 8'h00;
parameter MAGENTA_B = 8'hff;
parameter RED_R = 8'hff;
parameter RED_G = 8'h00;
parameter RED_B = 8'h00;
parameter BLUE_R = 8'h00;
parameter BLUE_G = 8'h00;
parameter BLUE_B = 8'hff;
parameter BLACK_R = 8'h00;
parameter BLACK_G = 8'h00;
parameter BLACK_B = 8'h00;
reg hs_reg;//定义一个寄存器,用于行同步
reg vs_reg;//定义一个寄存器,用户场同步
reg hs_reg_d0;//hs_reg一个时钟的延迟
//所有以_d0、d1、d2等为后缀的均为某个寄存器的延迟
reg vs_reg_d0;//vs_reg一个时钟的延迟
reg[11:0] h_cnt;//用于行的计数器
reg[11:0] v_cnt;//用于场(帧)的计数器
reg[11:0] active_x;//有效图像的的坐标x
reg[11:0] active_y;//有效图像的坐标y
reg[7:0] rgb_r_reg;//像素数据r分量
reg[7:0] rgb_g_reg;//像素数据g分量
reg[7:0] rgb_b_reg;//像素数据b分量
reg h_active;//行图像有效
reg v_active;//场图像有效
wire video_active;//一帧内图像的有效区域h_active & v_active
reg video_active_d0;
assign hs = hs_reg_d0;
assign vs = vs_reg_d0;
assign video_active = h_active & v_active;
assign de = video_active_d0;
assign rgb_r = rgb_r_reg;
assign rgb_g = rgb_g_reg;
assign rgb_b = rgb_b_reg;
always@(posedge clk or posedge rst)
begin
if(rst)
begin
hs_reg_d0 <= 1'b0;
vs_reg_d0 <= 1'b0;
video_active_d0 <= 1'b0;
end
else
begin // 这个地方左侧的寄存器是hs,vs,de的输出,hs_reg和vs_reg有关系
hs_reg_d0 <= hs_reg;
vs_reg_d0 <= vs_reg;
video_active_d0 <= video_active;
end
end
// 行计数,每次记一行的时钟个数,也就是一行的第几个时钟
always@(posedge clk or posedge rst)
begin
if(rst)
h_cnt <= 12'd0;
else if(h_cnt == H_TOTAL - 1)//行计数器到最大值清零
h_cnt <= 12'd0;
else
h_cnt <= h_cnt + 12'd1;
end
// x坐标,像素坐标,当前肩+同步+后肩结束时,输出有效像素,x用来计数有效的图像数据,或者说是x的坐标
always@(posedge clk or posedge rst)
begin
if(rst)
active_x <= 12'd0;
else if(h_cnt >= H_FP + H_SYNC + H_BP - 1)//计算图像的x坐标
active_x <= h_cnt - (H_FP[11:0] + H_SYNC[11:0] + H_BP[11:0] - 12'd1);
else
active_x <= active_x;
end
// 场计数,或者说是行数计数,用来计数多少行,每当一行的前肩开始时就进行计数,到达最大进行清零
always@(posedge clk or posedge rst)
begin
if(rst)
v_cnt <= 12'd0;
else if(h_cnt == H_FP - 1)//在行数计算器为H_FP - 1的时候场计数器+1或清零
if(v_cnt == V_TOTAL - 1)//场计数器到最大值了,清零
v_cnt <= 12'd0;
else
v_cnt <= v_cnt + 12'd1;//没到最大值,+1
else
v_cnt <= v_cnt;
end
// 行同步信号的输出,从前肩开始有效,到达设定的值时结束
always@(posedge clk or posedge rst)
begin
if(rst)
hs_reg <= 1'b0;
else if(h_cnt == H_FP - 1)//行同步开始了...
hs_reg <= 1'b1;
else if(h_cnt == H_FP + H_SYNC - 1)//行同步这时候要结束了
hs_reg <= 1'b0;
else
hs_reg <= hs_reg;
end
// 行数据有效信号,在一行前肩+同步+后肩内为低,图像数据有效时为高
always@(posedge clk or posedge rst)
begin
if(rst)
h_active <= 1'b0;
else if(h_cnt == H_FP + H_SYNC + H_BP - 1)
h_active <= 1'b1;
else if(h_cnt == H_TOTAL - 1)
h_active <= 1'b0;
else
h_active <= h_active;
end
// 场同步信号,和行同步信号类似,从前肩开始有效,到达设定的值时结束
always@(posedge clk or posedge rst)
begin
if(rst)
vs_reg <= 1'd0;
else if((v_cnt == V_FP - 1) && (h_cnt == H_FP - 1))
vs_reg <= 1'b1;
else if((v_cnt == V_FP + V_SYNC - 1) && (h_cnt == H_FP - 1))
vs_reg <= 1'b0;
else
vs_reg <= vs_reg;
end
// 场数据有效信号,在前肩+同步+后肩内为低,图像数据有效时为高,h_active和v_active共同用来指示数据是否有效,作为数据使能信号DE
always@(posedge clk or posedge rst)
begin
if(rst)
v_active <= 1'd0;
else if((v_cnt == V_FP + V_SYNC + V_BP - 1) && (h_cnt == H_FP - 1))
v_active <= 1'b1;
else if((v_cnt == V_TOTAL - 1) && (h_cnt == H_FP - 1))
v_active <= 1'b0;
else
v_active <= v_active;
end
// 根据行坐标输出特定的像素值
always@(posedge clk or posedge rst)
begin
if(rst)
begin
rgb_r_reg <= 8'h00;
rgb_g_reg <= 8'h00;
rgb_b_reg <= 8'h00;
end
else if(video_active)
if(active_x == 12'd0)
begin
rgb_r_reg <= WHITE_R;
rgb_g_reg <= WHITE_G;
rgb_b_reg <= WHITE_B;
end
else if(active_x == (H_ACTIVE/8) * 1)
begin
rgb_r_reg <= YELLOW_R;
rgb_g_reg <= YELLOW_G;
rgb_b_reg <= YELLOW_B;
end
else if(active_x == (H_ACTIVE/8) * 2)
begin
rgb_r_reg <= CYAN_R;
rgb_g_reg <= CYAN_G;
rgb_b_reg <= CYAN_B;
end
else if(active_x == (H_ACTIVE/8) * 3)
begin
rgb_r_reg <= GREEN_R;
rgb_g_reg <= GREEN_G;
rgb_b_reg <= GREEN_B;
end
else if(active_x == (H_ACTIVE/8) * 4)
begin
rgb_r_reg <= MAGENTA_R;
rgb_g_reg <= MAGENTA_G;
rgb_b_reg <= MAGENTA_B;
end
else if(active_x == (H_ACTIVE/8) * 5)
begin
rgb_r_reg <= RED_R;
rgb_g_reg <= RED_G;
rgb_b_reg <= RED_B;
end
else if(active_x == (H_ACTIVE/8) * 6)
begin
rgb_r_reg <= BLUE_R;
rgb_g_reg <= BLUE_G;
rgb_b_reg <= BLUE_B;
end
else if(active_x == (H_ACTIVE/8) * 7)
begin
rgb_r_reg <= BLACK_R;
rgb_g_reg <= BLACK_G;
rgb_b_reg <= BLACK_B;
end
else
begin
rgb_r_reg <= rgb_r_reg;
rgb_g_reg <= rgb_g_reg;
rgb_b_reg <= rgb_b_reg;
end
else
begin
rgb_r_reg <= 8'h00;
rgb_g_reg <= 8'h00;
rgb_b_reg <= 8'h00;
end
end
endmodule
配置数据查找表模块(lut_adv7511)
这个模块就是根据输入的下标输出设定好的值。
module lut_adv7511(
input[9:0] lut_index, // Look-up table index address
output reg[31:0] lut_data // I2C device address register address register data
);
always@(*)
begin
case(lut_index)
//To be compatible with the 16bit register address, add 8'h00
8'd0 : lut_data <= {8'h72,24'h004100}; //16'h4110;
8'd1 : lut_data <= {8'h72,24'h00d6c0};
8'd2 : lut_data <= {8'h72,24'h005512};
8'd3 : lut_data <= {8'h72,24'h001500}; //input id = 0x0 = 0000 = 24 bit RGB 4:4:4 or YCbCr 4:4:4 (separate syncs)
8'd4 : lut_data <= {8'h72,24'h00d03c};
8'd5 : lut_data <= {8'h72,24'h00af04};
8'd6 : lut_data <= {8'h72,24'h004c04};
8'd7 : lut_data <= {8'h72,24'h004000};
8'd8 : lut_data <= {8'h72,24'h009803};
8'd9 : lut_data <= {8'h72,24'h009ae0};
8'd10 : lut_data <= {8'h72,24'h009c30};
8'd11 : lut_data <= {8'h72,24'h009d61};
8'd12 : lut_data <= {8'h72,24'h00a2a4};
8'd13 : lut_data <= {8'h72,24'h00a3a4};
8'd14 : lut_data <= {8'h72,24'h00e0d0};
8'd15 : lut_data <= {8'h72,24'h00f900};
default:lut_data <= {8'hff,16'hffff,8'hff};
endcase
end
endmodule
I2C Master 寄存器配置模块(i2c_config)
这个模块使用了查找表模块,输出对应的下标,将查找的数据作为输入。然后这里还有一大堆使用I2C读写的代码,以后再看。
module i2c_config(
input rst,
input clk,
input[15:0] clk_div_cnt,
input i2c_addr_2byte,
output reg[9:0] lut_index,
input[7:0] lut_dev_addr,
input[15:0] lut_reg_addr,
input[7:0] lut_reg_data,
output reg error,
output done,
inout i2c_scl,
inout i2c_sda
);
TODO
- 分析I2C读写代码
- 了解视频时序
- 查看编码芯片数据手册
总结
本实验通过使用I2C配置编码芯片,构建模拟图像输出视频时序模块,完成了使用HDMI输出模拟图像(彩条)的功能。通过本次实验,了解了HDMI输出、视频时序、I2C读写的一些知识点。HDMI输出的是差分信号,芯片输出是可能需要编码芯片进行编码,不能够直接输出。视频时序中有前肩、后肩、同步等术语,行场信号是一个重要的知识点,要熟悉行场信号的构造。I2C是一个常用的配置接口,实验中的编码芯片由I2C进行配置,HDMI接口上也有一个。
参考
- 8k,4k,2k视频时序参数分享
- HDMI中的视频时序分析
- 基于FPGA的视频时序生成