准备训练数据
在preprocess_cutsom_data中,笔者采取第二个经过colmap的方法。但是这个方法其实需要一个前置结果,即colmap与LLFF的处理。接下来分别讨论:
Colmap
一个非常好的操作流程在这里:
https://zhuanlan.zhihu.com/p/576416530
可以看到在images之外,首先,手动生成了database.db;其次,在sparse/0/底下生成了3个bin和1个ini.
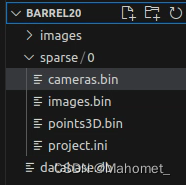
然后,已知相机内外参通过COLMAP进行稀疏/稠密模型重建操作过程
是作为官网对应讲解(https://colmap.github.io/faq.html#reconstruct-sparse-dense-model-from-known-camera-poses)的实现过程。而其中,又出现了关于sparse文件夹中需要出现的三个文件(cameras.txt, points3D.txt, and images.txt)的格式。
其中,points3D.txt是空的,images.txt则按照格式需要四元数(四元数与旋转矩阵的转换),主要是需要旋转矩阵和平移向量。
另有一篇类似的操作记录做参考