一、实景导航前期准备工作及点位采集
(一)实景导航前期准备工作
(1)拍摄设备
1.推荐相机:全画幅的佳能 Canon EOS 5D Mark IV
2.搭配镜头:原厂的佳能 Canon EF卡口 8-15mm 全画幅鱼眼镜头
3.三角架 :720Think定制三脚架A2570T
4.云台:凯唯斯 CAVIX PH-720A 全景云台
详细设备推荐可参考【720VR全景拍摄的设备推荐】
(2)制作平面区域图
1.需向场地方索要详细的场地平面图(如:场景地图,施工平面图等)
(3)导航点位确认
1.需和场地方确认实际导航路线(已便后期导航制作)
2.需确定导航路线点位距离,尽量保持每个点位之间的距离相等
(二) 导航点位采集方法
(1)拍摄步骤
(以上述推荐设备为例,即需要水平拍摄6张,天地无需进行拍摄,需要转动变焦圈至8mm左右)
- 在云台调校完毕的基础上,每次到达拍摄点后,再次检查水平。
- 将分度台锁紧旋钮拧松,定位螺丝旋钮选择60°孔拧入,稍紧即可,这样分度台每旋转60°都会有卡顿,我们以这些卡顿的位置进行拍摄。
- 将云台承载板转动至水平,转动云台使处于卡顿点。
- 相机切换为监视器显示,半按快门(对场景进行测光与对焦),拨动主拨盘更改快门速度,以调整画面曝光,对于新手来说,需要调整使得画面整体稍暗。
- 全按快门,等待两秒拍摄完成后,转动云台60°至下一个卡顿点拍摄第二张图片,拍摄者亦随之转动处于镜头背面位置。注意在走动过程中不要踢动挪位三脚架,若发生该情况时,需从第一张开始重新拍摄。
二、实景导航素材上传及作品编辑
(一)素材上传
1.登录蛙色账号,进入素材管理页面
2.按项目创建分组
3.将素材上传至分组中
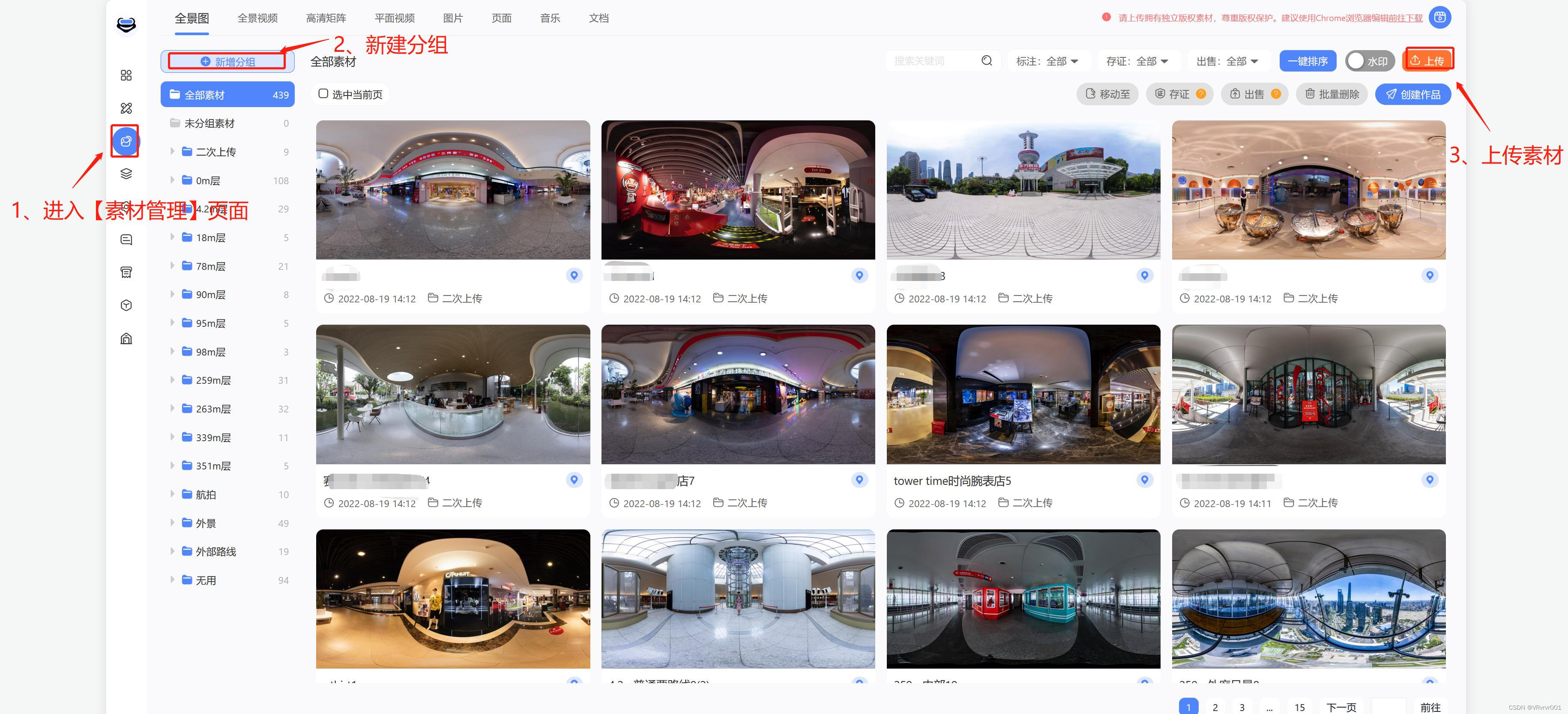
4完善素材信息(素材名称需要按实际路线中的名称进行排序)

(二)导航作品编辑
(1)导航路线添加
1创建作品,将素材添加到作品中

2点击右侧【全局】-【行业方案】-【实景导航】将作品的【智慧导航】功能开启

注:由于实景导航功能开启之后,无法关闭,所以开启时请仔细确认
3点击【热点】添加【导航】热点

①点击左侧功能菜单中的【热点】
②选择【漫游】热点类型
③热点定位选择【导航】
④根据实际路线情况选择对应导航热点图标(热点图标目前提供三种:前进几米后左转,前进几米,前进几米后右转 )
⑤根据实际点位之间的距离填写信息
⑥选择需要跳转的路线点位
注:在添加导航热点时,需要两两相对应的场景添加,以防路线有遗漏,不方便后续问题排查
(2)导航沙盘添加
1沙盘添加

①点击左侧工具栏中的【沙盘】功能
②点击【上传图片】选择对应区域的沙盘图
③添加热点并在沙盘图中将热点拖动到对应位置
注:在导航项目中只能设置【一级分组】
(3)【行业方案】-【智慧导航】相关功能设置
1导航功能开启开关

作者可将此开关打开后便可将作品变成智慧导航作品
注:由于实景导航功能开启之后,无法关闭,所以开启时请仔细确认
2主题色选择

蛙色平台目前提供【薄暮红】和【科技蓝】两种颜色可供选择(系统自动默认颜色为科技蓝)
主题色浏览界面显示

薄暮红

科技蓝
3导航LOGO

作者可通过该功能设置作品导航界面的logo
logo图片大小限制;
尺寸:100px*100px
格式:jpg,png
浏览界面展示位置
4类型设置
作者可通过设置类型将作品中的公共设施类场景统一分类

设置方法
①点击【新增类型】添加类型
②输入类型名称
③选择类型图片(选填)
④点击确定,完成新增类型

⑥在【编辑场景】窗口中的【类型选择】中选择对应类型
⑦类型选择完毕后,点击确定即可完成场景类型添加
类型图标大小限制;
尺寸:100px*100px
格式:jpg,png
5道路检测
作者可通过此功能检测导航路线配置是否成功完成

无通路场景:
当该场景是孤立的,没有添加任何导航热点时,便会列在“无通路场景”中
遗漏场景:
当A场景至B场景有导航热点,但是B场景至A场景没有导航热点时,便会列在“遗漏通路”中。添加了去的路线,就必须再添加一个返回的路线。
6优惠信息
作者可在【编辑场景】【优惠信息】中添加该商品最新的优惠信息

浏览界面显示

7轮播图
①点击场景编辑按钮,添加商家门头场景的轮播图,最新添加的图片排在前面

②填写轮播图描述
③轮播图链接:作者可在此仿佛相对应的跳转链接,用户在浏览时可以点击第一张轮播图直接跳转至链接所指页面进行浏览

浏览界面显示
8联系方式
作者可在此处添加商家电话

浏览界面显示
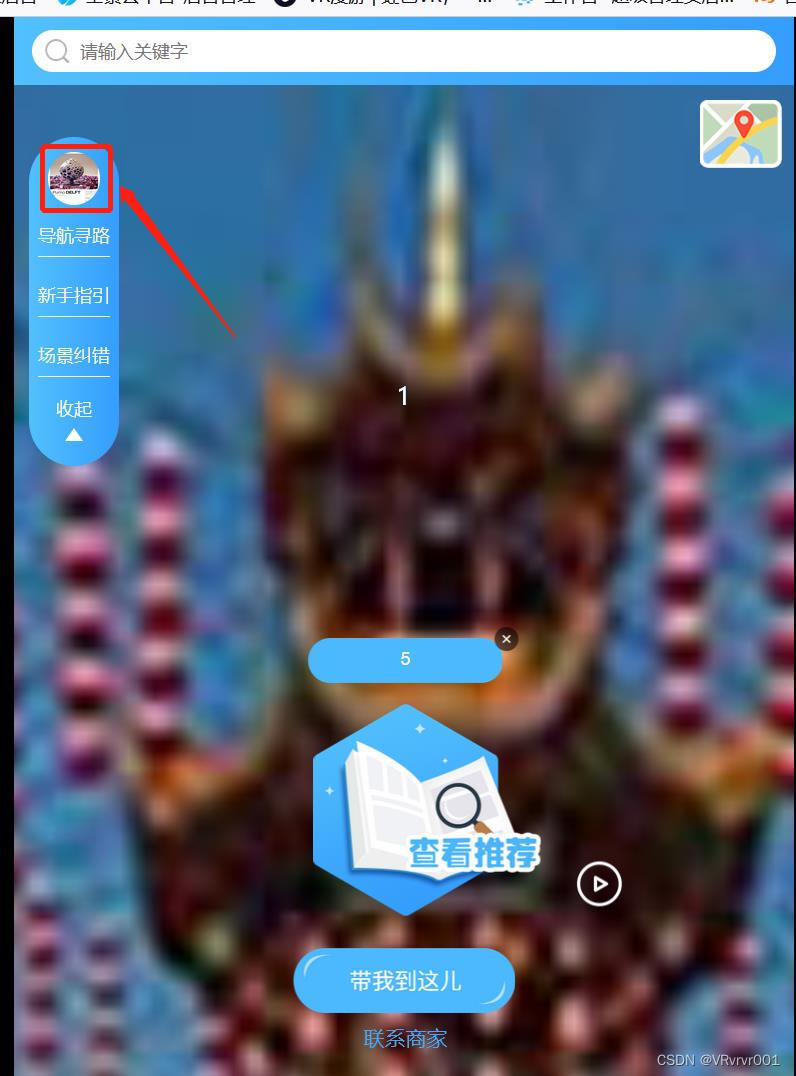
9导航方式
目前平台内置【实景路线】和【第三方地图】两种导航方式,用来满足不同用户实际需求

实景路线:当该场景用实景路线进行导航时,可以用后台所配置的导航热点进行导航
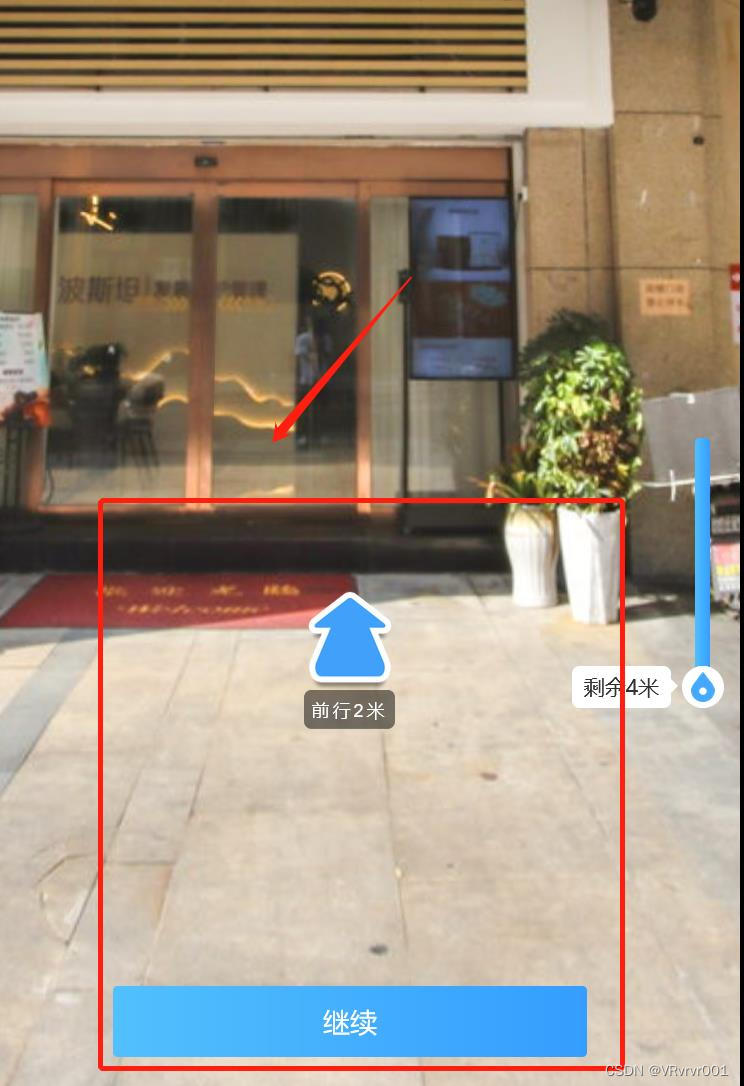
浏览界面显示
第三方地图:当改场景用【第三方地图】进行导航时,系统会直接跳转到第三方地图中进行导航

浏览界面显示
常见问题
Q:蛙色平台智慧实景导航能否实现从A场景到D场景是一条路线,而D场景到A场景是另一条路线呢
A:由于蛙色平台的导航计算方式是无向图的计算方法,所以目前这个是不支持的。如果强行要实现这个需求的话只能重新添加起点和终点图片重新规划路线进行操作。
以上就是本期VR实景智慧导航操作手册的详细教程,欢迎大家在评论区留言反馈更多优化建议!