文章目录
- 一:图像描述概述
- (1)图像描述
- (2)描述子
- 二:特征点
- (1)Moravec角点检测
- A:原理
- B:程序
- (2)Harris角点检测
- A:原理
- B:程序
- (3)SUSAN角点检测
- A:原理
- B:程序
一:图像描述概述
(1)图像描述
图像描述:将分割后区域的区域、边界的属性和相互关系用更为简单明确的文字、数值、符号或图来描述或说明。保留原图像或图像区域重要信息,减少数据量。它旨在通过自然语言来准确地描述图像中出现的对象、场景和其他相关信息。图像描述一般由计算机视觉和自然语言处理领域共同完成。图像描述的主要目标是使计算机能够理解和表达对图像的理解,将视觉信息转化为可读性强的文本描述。这项技术对于提高图像的可搜索性和可索引性非常有用,也可以帮助视觉障碍者理解图像内容

图像描述技术的应用非常广泛。例如,在社交媒体平台上,可以通过图像描述实现自动标签生成,提高图像搜索的效果。此外,还可以应用于辅助无障碍技术、智能推荐系统等领域,为用户提供更好的体验和服务
(2)描述子
描述子:是计算机视觉领域中用于表示图像或图像中的特征的一种数值化描述方法。它提取图像中的关键信息,并将其转化为可以进行比较和匹配的向量或特征向量。描述子在图像处理和计算机视觉任务中起着重要作用,如图像检索、目标识别、图像匹配等。通过使用描述子,可以将复杂的图像数据转换成紧凑且可度量的向量形式,从而方便进行图像之间的相似性计算和比较。常见的描述子包括
- SIFT
- SURF
- ORB
描述子应具有以下特点
- 唯一性
- 几何变换不变性
- 完整性
- 敏感性
- 抽象性
描述子的生成通常涉及到特征提取算法,这些算法会在图像中寻找图像的局部特征,并将其转换为具有良好鲁棒性和区分性的描述子。这些描述子通常具有以下特点:对尺度、旋转和光照变化具有一定的不变性;在不同图像中相同物体的描述子能够相互匹配;不同物体的描述子能够有较大的差异性描述子在计算机视觉领域中被广泛应用,它们为图像处理和分析提供了有效的工具,可以实现图像特征的提取、匹配和识别等任务
二:特征点
特征点:也称为关键点(Key Points)或兴趣点(Interest Points),是图像中具有显著性、独特性和稳定性的位置或区域。它们在图像中代表了一些突出的结构、边缘或纹理信息。如线条交叉点、边界封闭区域的重心,或者曲面的高点等;也可以没有实际的直观视觉意义,但在某种角度、某个尺度上含有丰富的易于匹配的信息。特征点具有以下特点
- 显著性:特征点应该在图像中相对其他区域更加明显和突出,能够吸引注意力。
- 独特性:特征点应该具有较高的不变性,能够在不同的图像中准确地找到对应的特征点。
- 稳定性:特征点应该对于尺度、旋转、仿射变换等图像变化具有一定程度的稳定性
特征点在影像匹配、图像拼接、运动估计以及形状描述等诸多方面都具有重要作用。特征点通常由特征检测算法自动提取,这些算法可以根据图像的局部特征属性来确定特征点的位置和尺度。常见的特征点检测算法包括Harris角点检测、SIFT(Scale-Invariant Feature Transform)、SURF(Speeded-Up Robust Features)等
角点是特征点中最主要的一类,由景物曲率较大地方的两条或多条边缘的交点所形成,比如线段的末端、轮廓的拐角等
(1)Moravec角点检测
A:原理
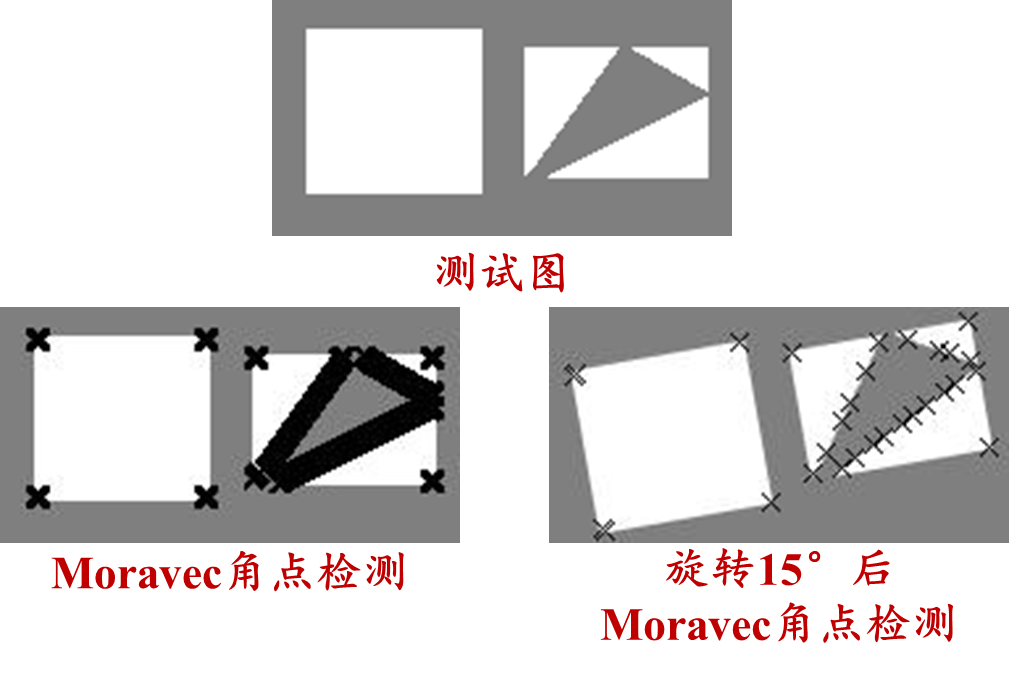
Moravec角点检测:是一种经典的图像特征检测算法,用于检测图像中的角点。Moravec角点检测算法基于角点的一个重要特性:在角点处,图像在各个方向上的微小平移都会引起较大的灰度变化。算法通过滑动窗口在图像中的每个像素位置上进行操作,计算不同方向上窗口内的灰度差异来确定是否存在角点,具体步骤如下
- 对于图像中的每个像素位置,定义一个小的窗口
- 分别在水平、垂直和对角线方向上对窗口进行平移,并计算平移后窗口与原窗口之间的灰度差异
- 对于每个平移方向,计算灰度差异的总和或平均值,作为该窗口位置上的角点响应值
- 针对所有像素位置,根据角点响应值进行阈值处理或非极大值抑制,筛选出最显著的角点
Moravec角点检测算法的优点是简单、快速,适用于实时应用和计算资源受限的场景。然而,它对于尺度变化、噪声和旋转等因素比较敏感,并且可能会产生大量的冗余角点。因此,后续的改进算法如Harris角点检测算法等被提出,以提高角点检测的稳定性和鲁棒性。另外
- 当固定窗口在平坦区域时,灰度比较均匀,4个方向的灰度变化值都很小
- 在边缘处,沿边缘方向的灰度变化值很小,沿垂直边缘方向的灰度变化值比较大
- 当窗口在角点或独立点上的时候,沿各个方向的灰度变化值都比较大
- 因此,若某窗口内各个方向变化的最小值大于某个阈值,说明各方向的变化都比较大,则该窗口所在即为角点所在
B:程序
如下
matlab实现:
clear,clc,close all;
% image=im2double(rgb2gray(imread('bricks.jpg')));
% image= im2double(rgb2gray(imread('bricksrotate.jpg')));
image= im2double(rgb2gray(imread('testrotate.bmp')));
figure,imshow(image),title('Ôͼ');
[N,M]=size(image);
radius=3;
CRF=zeros(N,M);
for i=radius+1:M-radius
for j=radius+1:N-radius
v=zeros(4,1);
for m=-radius:radius-1
v(1)=v(1)+(image(j,i+m)-image(j,i+m+1))^2;
v(2)=v(2)+(image(j+m,i)-image(j+m+1,i))^2;
v(3)=v(3)+(image(j+m,i+m)-image(j+m+1,i+m+1))^2;
v(4)=v(4)+(image(j+m,i-m)-image(j+m+1,i-m-1))^2;
end
CRF(j,i)=min(v(:));
end
end
thresh=0.08;
for i=radius+1:M-radius
for j=radius+1:N-radius
temp=CRF(j-radius:j+radius,i-radius:i+radius);
if CRF(j,i)>thresh && CRF(j,i)==max(temp(:))
for m=-radius:radius
image(j+m,i+m)=0;
image(j-m,i+m)=0;
end
end
end
end
figure,imshow(image),title('Moravec½¹µã¼ì²â');
imwrite(image,'Moravetestrotate.jpg');
python实现:
import numpy as np
import cv2
import matplotlib.pyplot as plt
# Load and convert the image to grayscale
image = cv2.imread('testrotate.bmp')
image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
image = image.astype(np.float32)
# Display the original image
plt.imshow(image, cmap='gray')
plt.title('Original Image')
plt.show()
N, M = image.shape
radius = 3
CRF = np.zeros((N, M))
# Calculate the Corner Response Function (CRF)
for i in range(radius, M-radius):
for j in range(radius, N-radius):
v = np.zeros(4)
for m in range(-radius, radius):
v[0] += (image[j, i+m] - image[j, i+m+1]) ** 2
v[1] += (image[j+m, i] - image[j+m+1, i]) ** 2
v[2] += (image[j+m, i+m] - image[j+m+1, i+m+1]) ** 2
v[3] += (image[j+m, i-m] - image[j+m+1, i-m-1]) ** 2
CRF[j, i] = np.min(v)
thresh = 0.08
# Suppress non-maximum corners
for i in range(radius, M-radius):
for j in range(radius, N-radius):
temp = CRF[j-radius:j+radius, i-radius:i+radius]
if CRF[j, i] > thresh and CRF[j, i] == np.max(temp):
for m in range(-radius, radius+1):
image[j+m, i+m] = 0
image[j-m, i+m] = 0
# Display the resulting image with suppressed corners
plt.imshow(image, cmap='gray')
plt.title('Moravec Corner Detection')
plt.show()
# Save the resulting image
cv2.imwrite('Moravetestrotate.jpg', image)
(2)Harris角点检测
A:原理
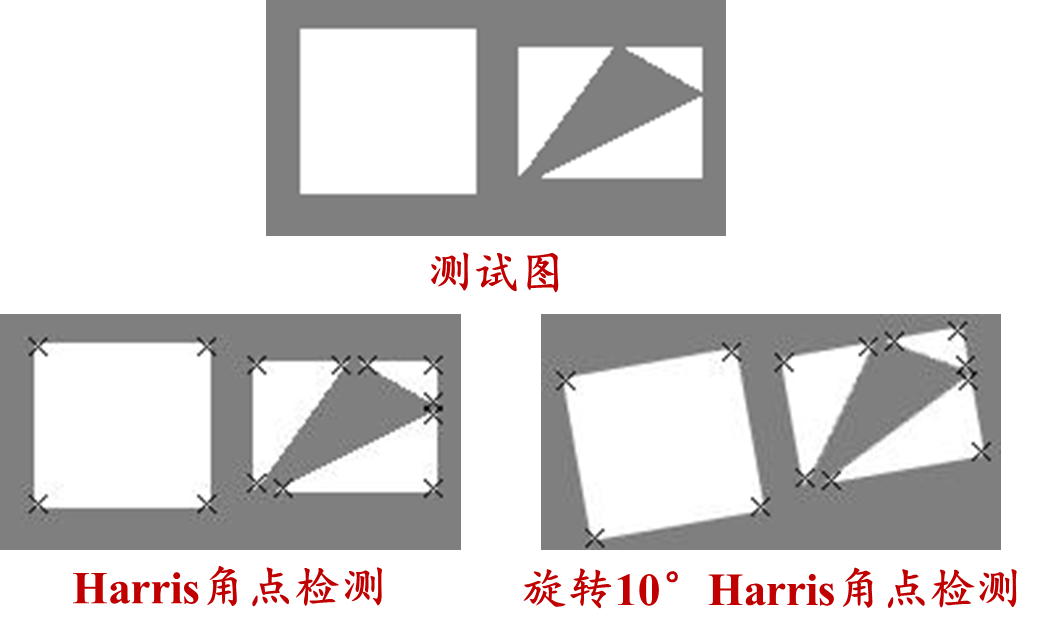
Harris角点检测:是一种常用的图像特征检测算法,用于寻找图像中的角点。Harris角点检测算法基于以下假设:在角点处,图像在所有方向上进行微小平移时,灰度值会发生较大的变化。该算法通过计算图像局部区域的灰度值梯度来判断是否存在角点,并根据灰度值梯度的变化情况计算角点响应函数。具体步骤如下
- 对图像进行灰度处理(若原图不是灰度图)
- 计算每个像素位置上的梯度值,通常使用Sobel算子或其他梯度算子
- 根据梯度值计算自相关矩阵M,包括梯度的协方差矩阵
- 根据自相关矩阵M的特征值,计算角点响应函数R
- 根据设定的阈值,选取响应函数大于阈值的像素点作为角点
- 对于相邻的角点,进行非极大值抑制,保留具有最大响应的角点
Harris角点检测算法的优点是对于尺度变化、旋转和仿射变换等具有一定的不变性,并且能够检测到各种类型的角点。它在图像配准、目标跟踪、图像拼接等计算机视觉任务中得到广泛应用
B:程序
如下
matlab实现:
clear,clc,close all;
image= im2double(rgb2gray(imread('bricks.jpg')));
% image= im2double(rgb2gray(imread('bricksrotate.jpg')));
% image= im2double(rgb2gray(imread('testrotate.bmp')));
figure,imshow(image),title('原图');
[h,w]=size(image);
Hx = [-2 -1 0 1 2]; % x方向梯度算子(用于Harris角点提取算法)
fx = filter2(Hx,image); % x方向滤波
Hy = [-2;-1;0;1;2]; % y方向梯度算子(用于Harris角点提取算法)
fy = filter2(Hy,image); % y方向滤波
fx2 = fx.^2;
fy2 = fy.^2;
fxy = fx.*fy;
sigma=2;
Hg= fspecial('gaussian',[7 7],sigma);
fx2 = filter2(Hg,fx2);
fy2 = filter2(Hg,fy2);
fxy = filter2(Hg,fxy);
result = zeros(h,w);
R = zeros(h,w);
k=0.06;
for i = 1:w
for j = 1:h
M = [fx2(j,i) fxy(j,i);fxy(j,i) fy2(j,i)];
detM = det(M); %求行列式
traceM = trace(M); %求迹
R(j,i) = detM-k*traceM^2;
end
end
radius=3;
num=0;
for i = radius+1:w-radius
for j = radius+1:h-radius
temp=R(j-radius:j+radius,i-radius:i+radius);
if R(j,i)==max(temp(:))
result(j,i)=1;
num=num+1;
end
end
end
Rsort=zeros(num,1);
[posy, posx] = find(result == 1);
for i=1:num
Rsort(i)=R(posy(i),posx(i));
end
[Rsort,index]=sort(Rsort,'descend');
corner=24;
for i=1:corner
y=posy(index(i));
x=posx(index(i));
for m=-radius:radius
image(y+m,x+m)=0;
image(y-m,x+m)=0;
end
end
figure,imshow(image),title('Harris角点检测');
% imwrite(image,'Harristestrotate.jpg');
python实现:
import cv2
import numpy as np
import matplotlib.pyplot as plt
# Load and convert the image to grayscale
image = cv2.imread('bricks.jpg')
image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
image = image.astype(np.float32) / 255.0
# Display the original image
plt.imshow(image, cmap='gray')
plt.title('原图')
plt.show()
h, w = image.shape
Hx = np.array([-2, -1, 0, 1, 2]) # x方向梯度算子(用于Harris角点提取算法)
fx = cv2.filter2D(image, -1, Hx) # x方向滤波
Hy = np.array([[-2], [-1], [0], [1], [2]]) # y方向梯度算子(用于Harris角点提取算法)
fy = cv2.filter2D(image, -1, Hy) # y方向滤波
fx2 = fx ** 2
fy2 = fy ** 2
fxy = fx * fy
sigma = 2
Hg = cv2.getGaussianKernel(7, sigma)
fx2 = cv2.filter2D(fx2, -1, Hg)
fy2 = cv2.filter2D(fy2, -1, Hg)
fxy = cv2.filter2D(fxy, -1, Hg)
result = np.zeros((h, w))
R = np.zeros((h, w))
k = 0.06
for i in range(w):
for j in range(h):
M = np.array([[fx2[j, i], fxy[j, i]], [fxy[j, i], fy2[j, i]]])
detM = np.linalg.det(M) # 求行列式
traceM = np.trace(M) # 求迹
R[j, i] = detM - k * traceM ** 2
radius = 3
num = 0
for i in range(radius + 1, w - radius):
for j in range(radius + 1, h - radius):
temp = R[j - radius : j + radius, i - radius : i + radius]
if R[j, i] == np.max(temp):
result[j, i] = 1
num += 1
Rsort = np.zeros(num)
pos = np.where(result == 1)
for i in range(num):
Rsort[i] = R[pos[0][i], pos[1][i]]
index = np.argsort(Rsort)[::-1]
corner = 24
for i in range(corner):
y = pos[0][index[i]]
x = pos[1][index[i]]
for m in range(-radius, radius + 1):
image[y + m, x + m] = 0
image[y - m, x + m] = 0
# Display the resulting image with detected corners
plt.imshow(image, cmap='gray')
plt.title('Harris角点检测')
plt.show()
# Save the resulting image
cv2.imwrite('Harristestrotate.jpg', image * 255.0)
(3)SUSAN角点检测
A:原理
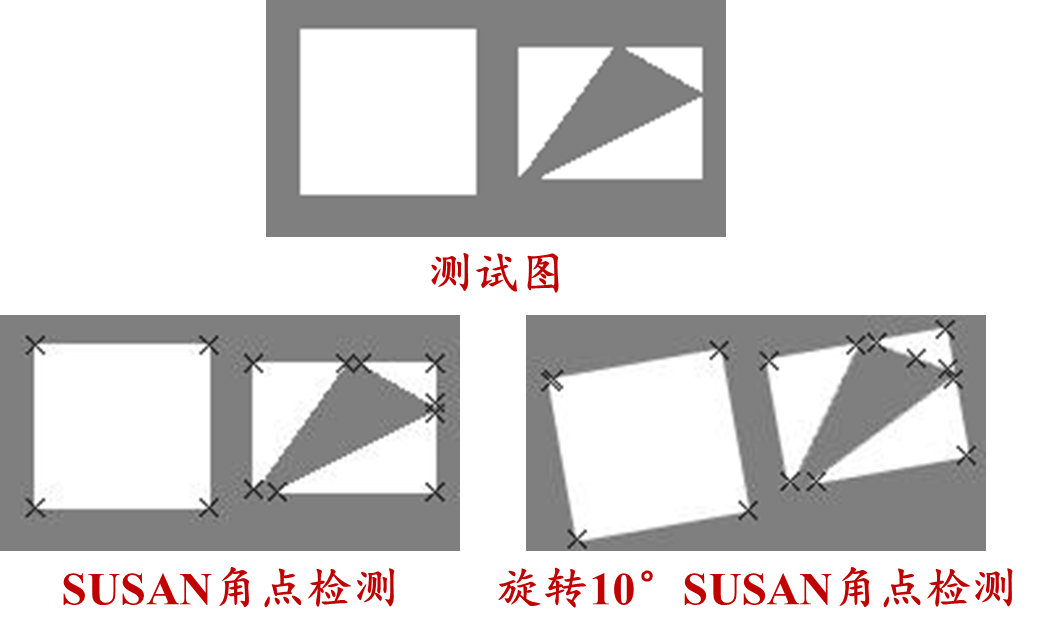
SUSAN角点检测:是一种常用的图像特征检测算法,用于寻找图像中的角点。SUSAN角点检测算法基于以下假设:在角点处,相邻像素的灰度值与中心像素的灰度值之间会存在明显的差异。该算法通过计算像素周围邻域内的灰度差异来判断是否存在角点,并根据邻域内像素的差异程度计算角点响应函数。具体步骤如下
- 对图像进行**灰度处理(**若原图不是灰度图)
- 选择一个合适的邻域大小(通常为37个像素点),以及一个阈值T,用于判断像素点是否为角点
- 遍历图像上的每个像素点
- 对于每个像素点,计算其周围邻域内像素与中心像素的灰度差异
- 计算灰度差异小于阈值T的像素数目
- 如果该数目小于某个预先设定的阈值K,则将该像素标记为角点
SUSAN角点检测算法的优点是对噪声和光照变化具有一定的鲁棒性,并且能够检测到各种类型的角点。它在图像配准、目标跟踪、特征提取等计算机视觉任务中得到广泛应用
B:程序
如下
matlab实现:
clear,clc,close all;
% image=im2double(rgb2gray(imread('bricks.jpg')));
% image= im2double(rgb2gray(imread('bricksrotate.jpg')));
% image= im2double(rgb2gray(imread('test.bmp')));
image= im2double(rgb2gray(imread('testrotate.bmp')));
figure,imshow(image),title('Ôͼ');
[N,M]=size(image);
templet=[0 0 1 1 1 0 0;0 1 1 1 1 1 0;1 1 1 1 1 1 1;1 1 1 1 1 1 1;1 1 1 1 1 1 1;0 1 1 1 1 1 0;0 0 1 1 1 0 0];
g=floor(sum(templet(:))/2-1);
R=zeros(N,M);
thresh=(max(image(:))-min(image(:)))/10;
radius=3;
for i=radius+1:M-radius
for j=radius+1:N-radius
count=0;
usan=zeros(2*radius+1,2*radius+1);
for m=-radius:radius
for n=-radius:radius
if templet(radius+1+n,radius+1+m)==1 && abs(image(j,i)-image(j+n,i+m))<thresh
count=count+1;
usan(radius+1+n,radius+1+m)=1;
end
end
end
if count<g && count>5
centerx=0;centery=0;totalgray=0;
for m=-radius:radius
for n=-radius:radius
if usan(radius+1+n,radius+1+m)==1
centerx=centerx+(i+m)*image(j+n,i+m);
centery=centery+(j+n)*image(j+n,i+m);
totalgray=totalgray+image(j+n,i+m);
end
end
end
centerx=centerx/totalgray;
centery=centery/totalgray;
dis=sqrt((i-centerx)^2+(j-centery)^2);
if dis>radius*sqrt(2)/3
R(j,i)=g-count;
end
end
end
end
for i=radius+1:M-radius
for j=radius+1:N-radius
temp=R(j-radius:j+radius,i-radius:i+radius);
if R(j,i)~=0 && R(j,i)==max(temp(:))
for m=-radius:radius
image(j+m,i+m)=0;
image(j-m,i+m)=0;
end
end
end
end
figure,imshow(image),title('SUSAN½Çµã¼ì²â');
imwrite(image,'Susantestrotate.jpg');
python实现:
import cv2
import numpy as np
import matplotlib.pyplot as plt
# Load and convert the image to grayscale
image = cv2.imread('testrotate.bmp')
image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
image = image.astype(np.float32) / 255.0
# Display the original image
plt.imshow(image, cmap='gray')
plt.title('原图')
plt.show()
N, M = image.shape
templet = np.array([[0, 0, 1, 1, 1, 0, 0],
[0, 1, 1, 1, 1, 1, 0],
[1, 1, 1, 1, 1, 1, 1],
[1, 1, 1, 1, 1, 1, 1],
[1, 1, 1, 1, 1, 1, 1],
[0, 1, 1, 1, 1, 1, 0],
[0, 0, 1, 1, 1, 0, 0]])
g = int(np.sum(templet) / 2 - 1)
R = np.zeros((N, M))
thresh = (np.max(image) - np.min(image)) / 10
radius = 3
for i in range(radius + 1, M - radius):
for j in range(radius + 1, N - radius):
count = 0
usan = np.zeros((2 * radius + 1, 2 * radius + 1))
for m in range(-radius, radius):
for n in range(-radius, radius):
if templet[radius + 1 + n, radius + 1 + m] == 1 and abs(image[j, i] - image[j + n, i + m]) < thresh:
count += 1
usan[radius + 1 + n, radius + 1 + m] = 1
if count < g and count > 5:
centerx = 0
centery = 0
totalgray = 0
for m in range(-radius, radius):
for n in range(-radius, radius):
if usan[radius + 1 + n, radius + 1 + m] == 1:
centerx += (i + m) * image[j + n, i + m]
centery += (j + n) * image[j + n, i + m]
totalgray += image[j + n, i + m]
centerx /= totalgray
centery /= totalgray
dis = np.sqrt((i - centerx) ** 2 + (j - centery) ** 2)
if dis > radius * np.sqrt(2) / 3:
R[j, i] = g - count
for i in range(radius + 1, M - radius):
for j in range(radius + 1, N - radius):
temp = R[j - radius : j + radius, i - radius : i + radius]
if R[j, i] != 0 and R[j, i] == np.max(temp):
for m in range(-radius, radius):
image[j + m, i + m] = 0
image[j - m, i + m] = 0
# Display the resulting image with detected corners
plt.imshow(image, cmap='gray')
plt.title('SUSAN角点检测')
plt.show()
# Save the resulting image
cv2.imwrite('Susantestrotate.jpg', image * 255.0)


![[Go版]算法通关村第十五关黄金——继续研究超大规模数据场景的问题](https://img-blog.csdnimg.cn/img_convert/642e2a0f511c3e4c451a8ca116d31346.png#pic_center)