一、项目介绍
随着科技的发展,智能机器人在日常生活中的应用越来越广泛。智能小车作为智能机器人的一种,具有便携性和多功能的特点,在教育、娱乐和工业等领域得到了广泛关注和应用。智能小车可以通过远程控制实现各种动作,如前进、后退、转弯等,并且可以通过搭载传感器实现避障、测距等功能。
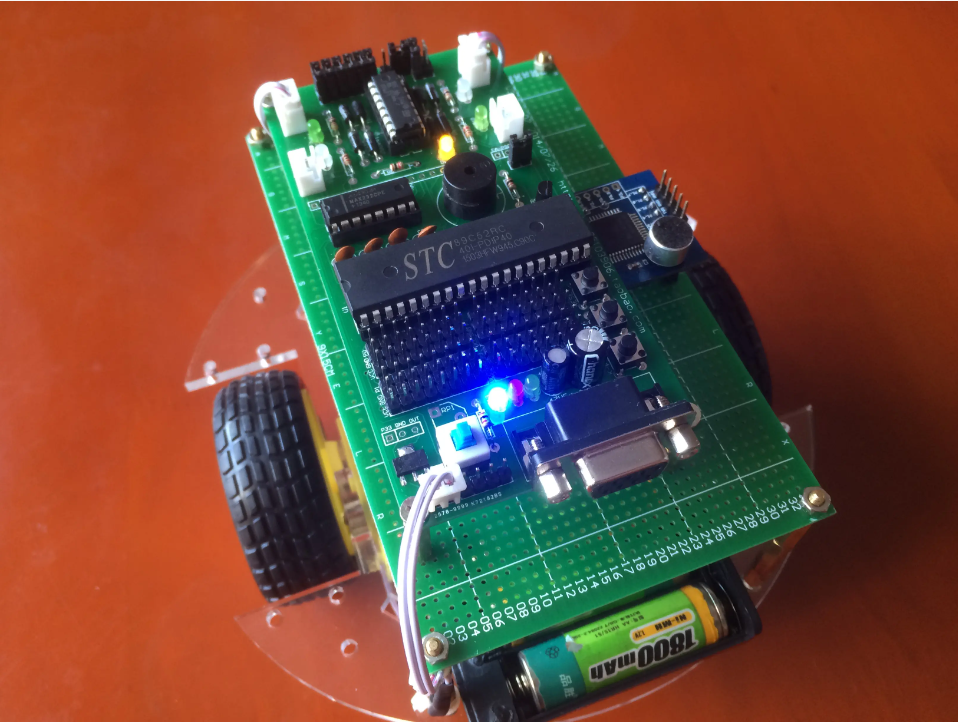
智能小车是一种通过采用主控芯片、蓝牙模块、电机驱动以及传感器等组件实现远程控制和避障功能的机器人。当前文章介绍基于STC89C52单片机的智能小车设计方案,提供详细的硬件和软件设计内容。
二、设计方案
2.1 硬件设计
【1】主控芯片选择
选择STC89C52单片机作为智能小车的主控芯片。单片机有广泛的应用支持,能够满足小车的控制需求。
【2】显示屏选型
为了显示小车的状态信息,选用LCD1602液晶显示屏。能够提供简洁明了的显示界面,并且与STC89C52单片机兼容良好。
【3】通信模块选择
由于需要通过手机APP远程控制小车,选择HC-05蓝牙模块进行通信。该模块易于使用、价格适中,并且与大多数手机兼容。
【4】电机驱动
为了控制小车的运动,采用L298N电机驱动模块。这种模块具有高性能、稳定可靠的特点,能够驱动直流电机实现小车的前进、后退、转弯等动作。
【5】避障模块
为了实现智能避障功能,在小车正前方安装两个红外壁障模块。这些模块能够检测前方障碍物,当检测到障碍物时,小车将停止运动,以避免碰撞。
2.2 软件设计
【1】主控程序
在STC89C52单片机上编写主控程序,实现蓝牙通信的初始化、接收手机APP指令、控制电机驱动模块以及红外壁障的检测等功能。主控程序需要实时响应手机指令,并根据指令控制小车的运动。
【2】手机APP开发 开发手机APP
通过蓝牙与智能小车建立连接,并发送指令给小车,控制小车的移动动作。手机APP界面设计简洁直观,方便用户进行操作。
2.3 小车运动控制流程
【1】初始化
开启电源后,主控芯片进行各个外设的初始化设置,包括蓝牙模块、LCD显示屏、电机驱动模块和红外壁障模块。
【2】连接手机APP
通过手机APP与蓝牙模块建立连接,确保手机与小车之间的通信畅通。
【3】接收指令
主控芯片接收手机APP发送的指令,根据指令判断小车前进、后退、左转弯、右转弯等动作。
【4】控制电机
根据接收到的指令,主控芯片通过电机驱动模块控制电机的旋转方向和速度,以实现小车的运动。
【5】避障检测
红外壁障模块实时检测前方障碍物,当检测到障碍物时,主控芯片停止发送电机指令,以避免碰撞。
【6】显示状态
通过LCD显示屏显示小车的状态信息,如电量、当前动作。
三、源代码
#include <reg52.h>
// 定义引脚连接
sbit enA = P1^0; // 电机A使能引脚
sbit in1 = P1^1; // 电机A正转引脚
sbit in2 = P1^2; // 电机A反转引脚
sbit enB = P1^3; // 电机B使能引脚
sbit in3 = P1^4; // 电机B正转引脚
sbit in4 = P1^5; // 电机B反转引脚
// 定义红外壁障引脚连接
sbit obstacle1 = P2^0; // 红外壁障模块1
sbit obstacle2 = P2^1; // 红外壁障模块2
// 定义LCD1602液晶显示屏引脚连接
sbit rs = P3^0; // RS引脚
sbit rw = P3^1; // RW引脚
sbit en = P3^2; // EN引脚
sbit lcd_d4 = P3^4; // 数据线D4引脚
sbit lcd_d5 = P3^5; // 数据线D5引脚
sbit lcd_d6 = P3^6; // 数据线D6引脚
sbit lcd_d7 = P3^7; // 数据线D7引脚
// 初始化LCD1602液晶显示屏
void LCD_Init();
// 打印字符串到LCD1602液晶显示屏指定位置
void LCD_PrintString(unsigned char row, unsigned char col, char *str);
// 发送命令到LCD1602液晶显示屏
void LCD_SendCommand(unsigned char command);
// 发送数据到LCD1602液晶显示屏
void LCD_SendData(unsigned char data);
// 延时函数
void delay(unsigned int time) {
unsigned int i, j;
for(i = 0; i < time; i++)
for(j = 0; j < 125; j++);
}
// 初始化函数
void Init() {
LCD_Init(); // 初始化LCD1602液晶显示屏
// 初始化其他外设,蓝牙模块、红外壁障模块
}
// 控制电机A正转
void MotorA_Forward() {
in1 = 1;
in2 = 0;
}
// 控制电机A反转
void MotorA_Backward() {
in1 = 0;
in2 = 1;
}
// 控制电机A停止
void MotorA_Stop() {
in1 = 0;
in2 = 0;
}
// 控制电机B正转
void MotorB_Forward() {
in3 = 1;
in4 = 0;
}
// 控制电机B反转
void MotorB_Backward() {
in3 = 0;
in4 = 1;
}
// 控制电机B停止
void MotorB_Stop() {
in3 = 0;
in4 = 0;
}
// 检测障碍物
unsigned char ObstacleDetected() {
// 红外壁障检测代码,返回检测结果
}
// 主程序
void main() {
Init(); // 初始化函数
while(1) {
// 主程序的逻辑
// 检测障碍物
if (ObstacleDetected()) {
// 如果检测到障碍物,停止电机运动
MotorA_Stop();
MotorB_Stop();
}
}
}
四、总结
本设计介绍了基于STC89C52单片机的智能小车设计方案。通过与手机APP的连接,小车可以远程控制,并利用红外壁障模块实现避障功能。