Linux内核源码分析 (3)调度器的实现
文章目录
- Linux内核源码分析 (3)调度器的实现
- 一、概述
- 二、调度器数据结构
- 1、task_struct中与调度有关的的成员
- 2、调度器类
- 3、就绪队列
- 4、调度实体
- 三、处理优先级
- 1、优先级的内核表示
- 2、计算优先级
- 3、计算负荷权重
- 四、核心调度器
- 1、周期性调度器
- 2、主调度器
- 3、与fork交互
- 4、上下文切换
一、概述
- 每次调用调度器时,它会挑选具有最高等待时间的进程,把CPU提供给该进程。如果经常发生这种情况,那么进程的不公平待遇不会累积,不公平会均匀分布到系统中的所有进程。
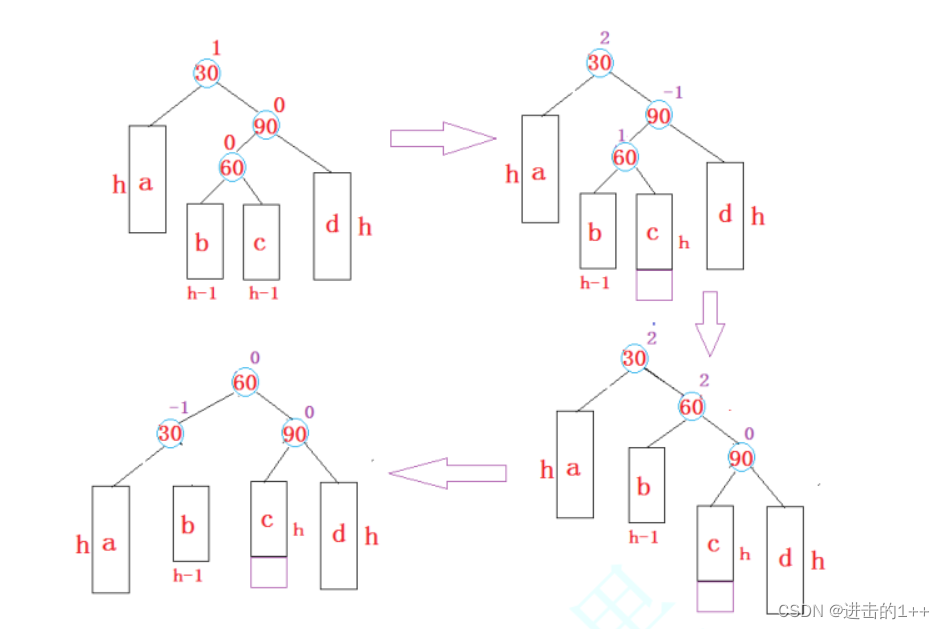
- 下图说明了调度器如何记录哪个进程已经等待了多长时间。由于可运行进程是排队的,该结构称之为就绪队列

所有的可运行进程都按时间在一个红黑树中排序,所谓时间即其等待时间。等待CPU时间最长的进程是最左侧的项,调度器下一次会考虑该进程。等待时间稍短的进程在该树上从左至右排序。在一个调度周期里面,所有进程的虚拟运行时间是相同的,所以在进程调度时,只需要找到虚拟运行时间最小的进程调度运行即可。
二、调度器数据结构
- 调度器使用一系列数据结构,来排序和管理系统中的进程。调度器的工作方式与这些结构的设计密切相关。几个组件在许多方面彼此交互。下面概述了这些组件的关联。下文中将这两个组件称为通用调度器(
generic scheduler)或核心调度器(core scheduler)。
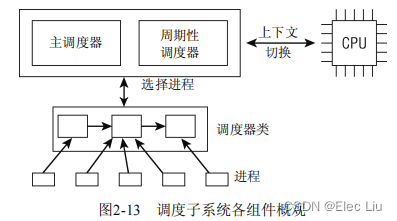
- 主调度器:通过调用
schedule()函数来完成进程的选择和切换。 - 周期性调度器:根据固定频率自动调用
scheduler_tick()函数,不时检测是否有必要进行进程切换。 - 上下文切换:主要做两个事情(切换地址空间、切换寄存器和栈空间)
- 主调度器:通过调用
- 调度器类用于判断接下来运行哪个进程。内核支持不同的调度策略(完全公平调度、实时调度、在无事可做时调度空闲进程),调度类使得能够以模块化方法实现这些策略,即一个类的代码不需要与其他类的代码交互。在调度器被调用时,它会查询调度器类,得知接下来运行哪个进程。
- 在选中将要运行的进程之后,必须执行底层任务切换。这需要与CPU的紧密交互。
- 每个进程都刚好属于某一调度类,各个调度类负责管理所属的进程。通用调度器自身完全不涉及进程管理,其工作都委托给调度器类。
1、task_struct中与调度有关的的成员
include/linux/<sched.h>
struct task_struct {
...
/*prio和normal_prio表示动态优先级,static_prio表示进程的静态优先级*/
int prio, static_prio, normal_prio;
/*表示实时进程的优先级,范围是[0,99]*/
unsigned int rt_priority;
/*表示该进程所属的调度器类*/
const struct sched_class *sched_class;
/*调度实体的实例。注意:调度器不限于调度进程,还可以处理更大的实体。这可以用于实现组调度:可用的CPU时间
可以首先在一般的进程组(例如,所有进程可以按所有者分组)之间分配,接下来分配的时间在组内再次分配。*/
struct sched_entity se;
/*policy保存了对该进程应用的调度策略,Linux支持5种可能的值:
SCHED_NORMAL: 通过完全公平调度器来处理,用于普通进程
SCHED_BATCH: 通过完全公平调度器来处理,用于非交互、CPU使用密集的批处理进程,不会干扰交互式进程
SCHED_IDLE: 通过完全公平调度器来处理,其相对权重总是最小的。
SCHED_RR: 通过实时调度器处理,用于实现软实时进程,实现了一种循环方法
SCHED_FIFO: 通过实时调度器处理,用于实现软实时进程,实现了一种先进先出机制。
*/
unsigned int policy;
/*一个位域,在多处理器系统上使用,用来限制进程可以在哪些CPU上运行*/
cpumask_t cpus_allowed;
/*是一个表头,用于维护包含各进程的一个运行表,该成员实时调度器需要,不用于CFS*/
struct list_head run_list;
/*指定进程可使用CPU的剩余时间段,该成员实时调度器需要,不用于CFS*/
unsigned int time_slice;
...
}
2、调度器类
-
调度器类提供了通用调度器和各个调度方法之间的关联,Linux内核抽象一个调度类
struct sched_class结构体表示调度类,具体内核源码如下:
kernel/sched/<sched.h>struct sched_class { /*系统当中有多个调度类,按照调度优先级排成一个链表,下一优先级的高类*/ const struct sched_class *next; #ifdef CONFIG_UCLAMP_TASK int uclamp_enabled; #endif /*将进程加入到执行队列当中,即将调度实体(进程)存放到红黑树中,并对nr_running变量自动会加1。 (nr_running指定了队列上可运行进程的数目,不考虑其优先级或调度类)*/ void (*enqueue_task) (struct rq *rq, struct task_struct *p, int flags); /*从执行队列当中删除进程,并对nr_running变量自动减1 */ void (*dequeue_task) (struct rq *rq, struct task_struct *p, int flags); /*放弃CPU执行权,实际上该函数执行先出队后入队,在这种情况下,它直接将调度实体放在红黑树的最右端*/ void (*yield_task) (struct rq *rq); bool (*yield_to_task)(struct rq *rq, struct task_struct *p, bool preempt); /*用于检杳当前进程是否可被新进程抢占*/ void (*check_preempt_curr)(struct rq *rq, struct task_struct *p, int flags); /*选择下一个应用要运行的进程*/ struct task_struct *(*pick_next_task)(struct rq *rq); /*将进程放回到运行队列当中*/ void (*put_prev_task)(struct rq *rq, struct task_struct *p); void (*set_next_task)(struct rq *rq, struct task_struct *p, bool first); #ifdef CONFIG_SMP int (*balance)(struct rq *rq, struct task_struct *prev, struct rq_flags *rf); /*为进程选择一个合适的CPU */ int (*select_task_rq)(struct task_struct *p, int task_cpu, int sd_flag, int flags); /*迁移任务到处一个CPU */ void (*migrate_task_rq)(struct task_struct *p, int new_cpu); /*专门用于唤醍进程*/ void (*task_woken)(struct rq *this_rq, struct task_struct *task); /*修改进程在CPU的亲和力*/ void (*set_cpus_allowed)(struct task_struct *p, const struct cpumask *newmask); /*启动运行队列*/ void (*rq_online)(struct rq *rq); /*禁止运行队列*/ void (*rq_offline)(struct rq *rq); #endif /*调用自time tick函数,它可能引起进程切换,将驱动运行时(running)抢占*/ void (*task_tick)(struct rq *rq, struct task_struct *p, int queued); /* 进程创建时调用,不同调度策略的进程初始化也是不一样的 */ void (*task_fork)(struct task_struct *p); /*进程退出时会使用*/ void (*task_dead)(struct task_struct *p); /* * The switched_from() call is allowed to drop rq->lock, therefore we * cannot assume the switched_from/switched_to pair is serliazed by * rq->lock. They are however serialized by p->pi_lock. */ /*专门用于进程切换操作*/ void (*switched_from)(struct rq *this_rq, struct task_struct *task); void (*switched_to) (struct rq *this_rq, struct task_struct *task); /*更改进程的优先级*/ void (*prio_changed) (struct rq *this_rq, struct task_struct *task, int oldprio); unsigned int (*get_rr_interval)(struct rq *rq, struct task_struct *task); void (*update_curr)(struct rq *rq); #define TASK_SET_GROUP 0 #define TASK_MOVE_GROUP 1 #ifdef CONFIG_FAIR_GROUP_SCHED void (*task_change_group)(struct task_struct *p, int type); #endif }; -
调度器类可分为:
stop_sched_class、dl_sched_class、rt_sched_class、fair_sched_class和idle_sched_class
kernel/sched/<sched.h>extern const struct sched_class stop_sched_class;//停机调度类 extern const struct sched_class dl_sched_class;//限期调度类 extern const struct sched_class rt_sched_class;//实时调度类 extern const struct sched_class fair_sched_class;//公平调度类 extern const struct sched_class idle_sched_class;//空闲调度类这5种调度类的优先级从高到低依次为:停机调度类、限期调度类、实时调度类、公平调度类、空闲调度类。其中,
SCHED_NORMAL、SCHED_BATCH和SCHED_IDLE直接被映射到fair_sched_class;SCHED_FIFO和SCHED_RR与rt_sched_class向关联。Linux调度核心选择下一个合适的task运行时,会按照优先级顺序遍历调度类的pick_next_task函数- 停机调度类:优先级是最高的调度类,停机进程是优先级最高的进程,可以抢占所有其它进程,其他进程不可能抢占停机进程.
const struct sched_class stop_sched_class = { .next = &dl_sched_class, .enqueue_task = enqueue_task_stop, .dequeue_task = dequeue_task_stop, .yield_task = yield_task_stop, .check_preempt_curr = check_preempt_curr_stop, .pick_next_task = pick_next_task_stop, .put_prev_task = put_prev_task_stop, .set_next_task = set_next_task_stop, ... }; - 限期调度类:最早使用优先算法,使用红黑树把进程按照绝对截止期限从小到大排序,每次调度时选择绝对截止期限最小的进程。
const struct sched_class dl_sched_class = { .next = &rt_sched_class, .enqueue_task = enqueue_task_dl, .dequeue_task = dequeue_task_dl, .yield_task = yield_task_dl, .check_preempt_curr = check_preempt_curr_dl, .pick_next_task = pick_next_task_dl, .put_prev_task = put_prev_task_dl, .set_next_task = set_next_task_dl, ... }; - 实时调度类:为每个调度优先级维护一个队列。
const struct sched_class rt_sched_class = { .next = &fair_sched_class, .enqueue_task = enqueue_task_rt, .dequeue_task = dequeue_task_rt, .yield_task = yield_task_rt, .check_preempt_curr = check_preempt_curr_rt, .pick_next_task = pick_next_task_rt, .put_prev_task = put_prev_task_rt, .set_next_task = set_next_task_rt, ... }; - 公平调度类:使用完全公平调度算法。完全公平调度算法引入虚拟运行时间的相关概念:
虚拟运行时间 = 实际运行时间 * nice为0对应的权重 / 进程的权重。const struct sched_class fair_sched_class = { .next = &idle_sched_class, .enqueue_task = enqueue_task_fair, .dequeue_task = dequeue_task_fair, .yield_task = yield_task_fair, .yield_to_task = yield_to_task_fair, .check_preempt_curr = check_preempt_wakeup, .pick_next_task = __pick_next_task_fair, .put_prev_task = put_prev_task_fair, .set_next_task = set_next_task_fair, ... }; - 空闲调度类:每个CPU上有一个空闲线程,即
0号线程。空闲调度类优先级最低,仅当没有其他进程可以调度的时候,才会调度空闲线程。const struct sched_class idle_sched_class = { /* .next is NULL */ /* no enqueue/yield_task for idle tasks */ /* dequeue is not valid, we print a debug message there: */ .dequeue_task = dequeue_task_idle, .check_preempt_curr = check_preempt_curr_idle, .pick_next_task = pick_next_task_idle, .put_prev_task = put_prev_task_idle, .set_next_task = set_next_task_idle, ... };
- 停机调度类:优先级是最高的调度类,停机进程是优先级最高的进程,可以抢占所有其它进程,其他进程不可能抢占停机进程.
-
观察上述5个调度类的
next成员变量,可以发现他们是串联在一起的。Linux调度核心选择下一个合适的task运行时,会按照优先级顺序遍历调度类的pick_next_task函数。
3、就绪队列
- 核心调度器用于管理活动进程的主要数据结构称之为就绪队列。各个CPU都有自身的就绪队列,各个活动进程只出现在一个就绪队列中。在多个CPU上同时运行一个进程是不可能的(但发源于同一进程的各线程可以在不同处理器上执行,因为进程管理对进程和线程不作重要的区分)。
- 注意,进程并不是由就绪队列(
rq)的成员直接管理的!这是各个调度器类(如stop_sched_class、dl_sched_class、rt_sched_class、fair_sched_class和idle_sched_class)的职责,因此在各个就绪队列中嵌入了特定于调度器类的子就绪队列(struct cfs_rq cfs;和struct rt_rq rt;)。 - 就绪队列主要使用下列数据结构实现
kernel/sched.cstruct rq { /*指定了队列上可运行进程的数目,不考虑其优先级或调度类*/ unsigned long nr_running; ... /*提供了就绪队列当前负荷的度量,队列的负荷本质上与队列上当前活动进程的数目成正比。*/ struct load_weight load; #define CPU_LOAD_IDX_MAX 5 /*用于跟踪此前的负荷状态*/ unsigned long cpu_load[CPU_LOAD_IDX_MAX]; /*cfs和rt是嵌入的子就绪队列,分别用于完全公平调度器和实时调度器。*/ struct cfs_rq cfs; struct rt_rq rt; /*curr指向当前运行的进程的task_struct实例。idle指向idle进程的task_struct实例, 该进程亦称为idle线程,在无其他可运行进程时执行*/ struct task_struct *curr, *idle; /*用于实现就绪队列自身的时钟。每次调用周期性调度器时,都会更新clock的值。*/ u64 clock; ... }; - 系统的所有就绪队列都在
runqueues数组中,该数组的每个元素分别对应于系统中的一个CPU。在单处理器系统中,由于只需要一个就绪队列,数组只有一个元素。
kernel/sched.cstatic DEFINE_PER_CPU_SHARED_ALIGNED(struct rq, runqueues);
4、调度实体
- 由于调度器可以操作比进程更一般的实体(进程嵌入了
sched_entity实例,所以进程是可调度实体,还有更大的可调度实体比如组调度等 ),因此需要一个适当的数据结构来描述此类实体。其定义如下:
include/linux/<sched.h>struct sched_entity { /*用于负载均衡,决定了各个实体占队列总负荷的比例*/ struct load_weight load; /*run_node是标准的树结点,使得实体可以在红黑树上排序*/ struct rb_node run_node; /*表示该实体当前是否在就绪队列上接受调度*/ unsigned int on_rq; /*记录消耗的CPU时间,以用于完全公平调度器。跟踪运行时间是由update_curr不断累积完成的,调度器中许多地方都会调用该函数,例如,新进程加入就绪队列时,或者周期性调度器中。每次调用时,会计算当前时间和exec_start之间的差值,exec_start则更新到当前时间。差值则被加到sum_exec_runtime。*/ u64 sum_exec_runtime; u64 exec_start; /*在进程执行期间虚拟时钟上流逝的时间数量*/ u64 vruntime; /*在进程被撤销CPU时,其当前sum_exec_runtime值保存到prev_exec_runtime。此后,在进程抢占时又需要该数据。 注意:此过程并不会更新sum_exec_runtime。*/ u64 prev_sum_exec_runtime; ... }
三、处理优先级
1、优先级的内核表示
- 在用户空间可以通过
nice命令设置进程的静态优先级,这在内部会调用nice系统调用。进程的nice值为[-20,+19]。值越低,表明优先级越高。内核使用范围[0,139]来表示内部优先级。同样是值越低,优先级越高。实时进程范围为[0,99]。nice值[-20, +19]映射到范围100到139。如下图所示,实时进程的优先级总是比普通进程更高。

- Linux内核优先级源码如下:
include/linux/sched/<prio.h>#define MAX_NICE 19 #define MIN_NICE -20 /*nice值的范围*/ #define NICE_WIDTH (MAX_NICE - MIN_NICE + 1) /*实时进程最大优先级(不包含)*/ #define MAX_USER_RT_PRIO 100 #define MAX_RT_PRIO MAX_USER_RT_PRIO /*普通进程最大优先级(不包含)*/ #define MAX_PRIO (MAX_RT_PRIO + NICE_WIDTH) // 140 #define DEFAULT_PRIO (MAX_RT_PRIO + NICE_WIDTH / 2) // 120
2、计算优先级
- 由前文可知,
task_struct采用了4个成员来表示进程的优先级:prio和normal_prio表示动态优先级,static_prio表示进程的静态优先级。rt_priority表示进程的实时优先级,只对实时进程有用。- 静态优先级
static_prio是进程启动时分配的优先级。它可以用nice和sched_setscheduler系统调用修改,否则在进程运行期间会一直保持恒定。 - 正常优先级
normal_priority表示基于进程的静态优先级和调度策略计算出的优先级。因此,即使普通进程和实时进程具有相同的静态优先级,其普通优先级也是不同的。进程分支时,子进程会继承普通优先级。 - 调度优先级
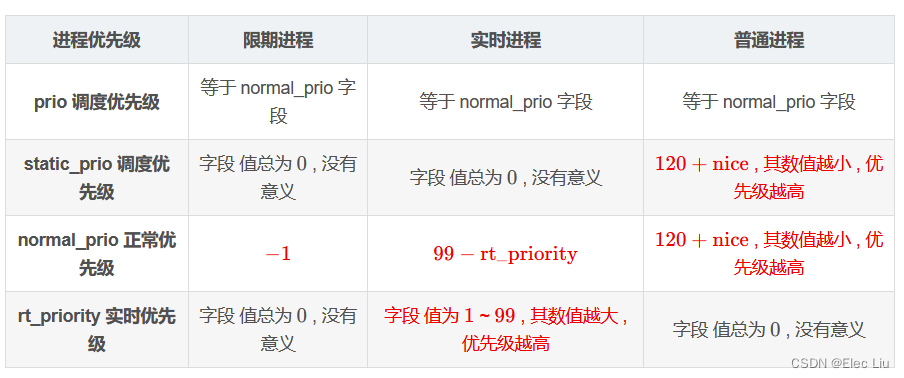
prio被调度器考虑,数值越小 , 优先级越高 。一般情况下prio字段 等于normal_prio字段。 特殊情况 : 在锁同步机制中 , 如果 A 进程 占有了 实时互斥锁 , B 进程 等待该 实时互斥锁 , 假如 B 进程的优先级 高于 A 进程 的优先级 , 此时就会将 占有 实时互斥锁 的 A 进程的 prio 优先级 提高到与 B 进程 prio 优先级相等的地位 ; - 实时优先级
rt_priority:对于“限期进程”和“普通进程”来说字段值总为0, 没有意义。对于“实时进程”来说,值为1~99, 其数值越大 , 优先级越高。
- 静态优先级
- 各种进程的四种优先级总结
3、计算负荷权重
- 进程的重要性不仅是由优先级指定的,而且还需要考虑保存在
task_struct->se.load的负荷权重。负荷权重包含在数据结构load_weight中。set_load_weight负责根据进程类型及其静态优先级计算负荷权重。 - 进程每降低一个
nice值,则多获得10%的CPU时间,每升高一个nice值,则放弃10%的CPU时间。为执行该策略,内核将优先级转换为权重值。我们首先看一下转换表。
kernel/sched.c
对内核使用的范围static const int prio_to_weight[40] = { /* -20 */ 88761, 71755, 56483, 46273, 36291, /* -15 */ 29154, 23254, 18705, 14949, 11916, /* -10 */ 9548, 7620, 6100, 4904, 3906, /* -5 */ 3121, 2501, 1991, 1586, 1277, /* 0 */ 1024, 820, 655, 526, 423, /* 5 */ 335, 272, 215, 172, 137, /* 10 */ 110, 87, 70, 56, 45, /* 15 */ 36, 29, 23, 18, 15, };[0, 39]中的每个nice级别,该数组中都有一个对应项。在计算CFS算法虚拟运行时间是会用到nice级别为0权重值,该权重值为1024。执行转换的代码也需要考虑实时进程。实时进程的权重是普通进程的两倍。另一方面,SCHED_IDLE进程的权重总是非常小。