在当今的技术前沿,光惯混合动作捕捉系统正在崭露头角,成为定位技术的新标杆,更是一项生活中不可或缺的实用工具。它是一个集光学与惯性测量技术于一体的全新定位解决方案,巧妙地融合了光学与惯性测量的优势,以其突破性的技术实现高精度、实时定位与追踪,适用于众多领域。
A、什么是光惯混合动作捕捉系统

简单来说,光惯混合动作捕捉系统是一个结合了光学与惯性系统的先进空间定位工具。该系统既能利用光学定位的高精度性,又能借助惯性导航系统提供稳定的姿态数据,即便是Mark点被遮挡的情况下,该系统也能不受干扰地进行精准数据采集,进而实现持续、无缝、高精度的空间与追踪。不仅提高了效率,更将动作捕捉的应用提升到了新的高度。
B、光惯混合定位追踪器
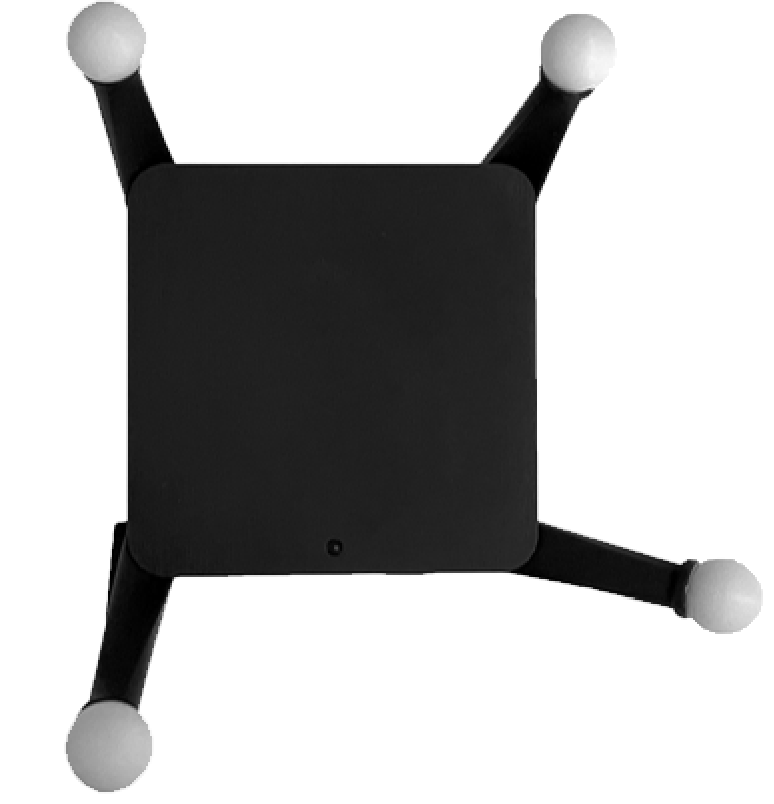
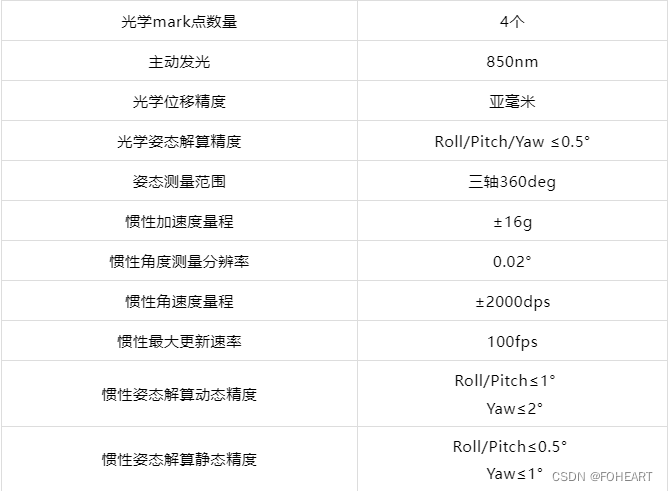
光惯混合定位追踪器采用了前沿的光惯混合空间定位算法,能够实时捕捉高精度的位置和姿态数据。每个定位追踪器配备了4个光学mark点,其主动发光850nm。同时,它还整合了三轴加速度计、三轴陀螺仪、三轴磁力计和气压计。其中,加速度计量程可达±16g,陀螺仪的量程高达±2000dps。这一配置确保了定位的精确性和实时性。
01、光惯混合追踪器参数
C、光惯混合动作捕捉系统分析软件
光惯混合动作捕捉系统分析软件是一款自主研发的光学动作捕捉系统分析软件。它由运动捕捉摄像机、分析软件和光惯混合定位追踪器组成。主要功能包括扫场校准标定功能模块、3D显示功能模块、刚体创建、刚体追踪、人体动作捕捉(6点IK等)。软件支持多目标群体捕捉,能够高精度地追踪刚体运动,并提供精准捕捉数据。
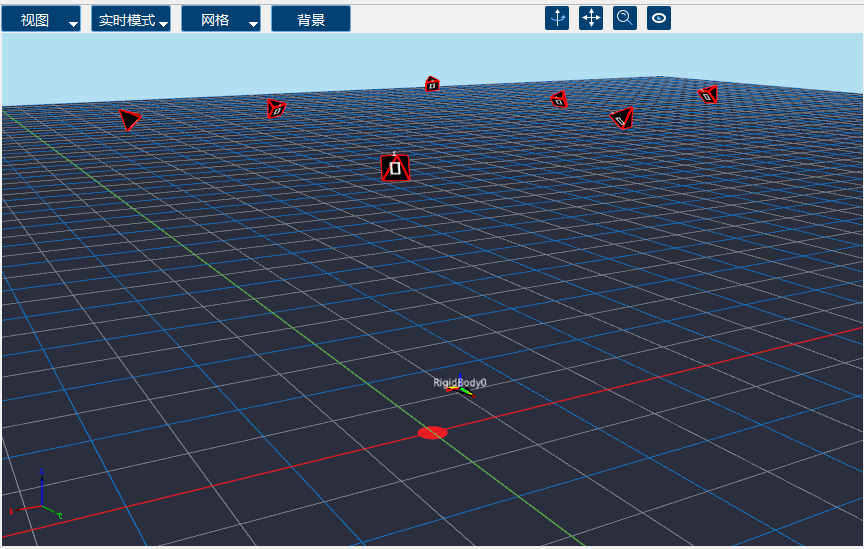
01、3D显示功能模块
它是整个软件的核心显示界面,拥有清晰直观的图像展示,用户可实时看到虚拟场景中的相机及刚体,轻松控制调整模型。通过先进的光惯融合空间定位算法,软件能自动准确的识别刚体,轻松应对刚体抗遮挡问题,确保数据在光惯混合系统分析软件中稳定传输,增强动作流畅性。
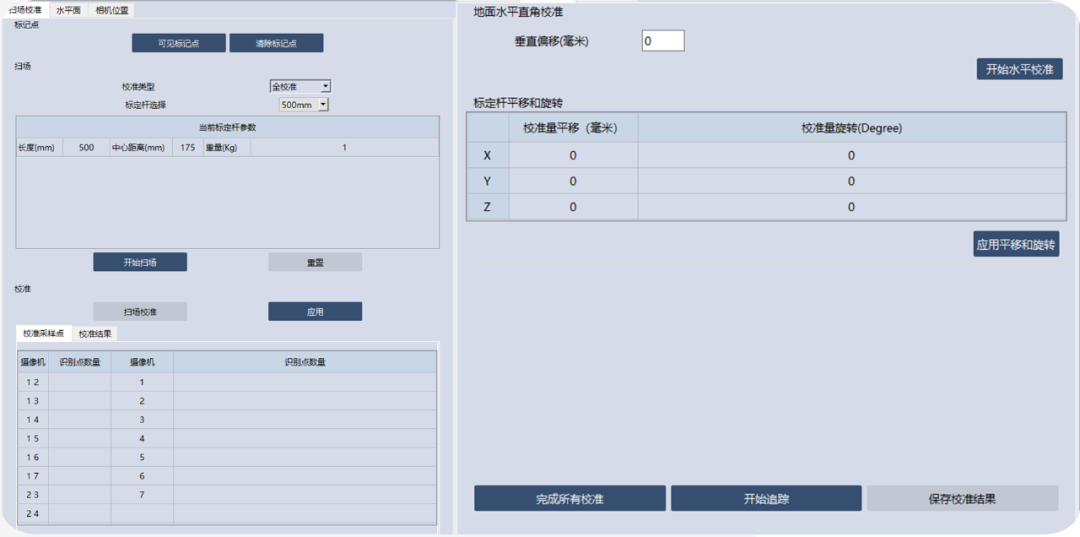
02、扫场校准标定功能模块
扫场校准标定功能模块主要实现校准计算出相机在世界坐标系中的绝对位置和空间姿态。主要包括扫场杆的数据处理计算,计算出相机两两之间的位置和姿态以及水平面标定杆的标定,标定出绝对世界坐标系。
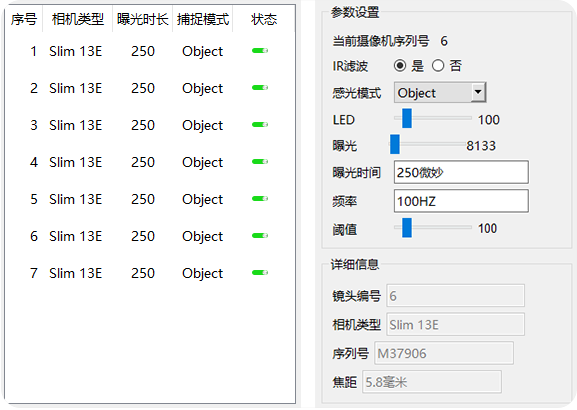
03、相机管理功能模块
相机管理功能模块允许用户对多个相机进行统一管理与控制。它提供了详细的相机内容显示设置和自定义参数调整,确保用户能够根据场景需求进行相机配置。同时,用户可轻松调节曝光时长、采样频率、感光模式等参数,确保拍摄效果的最佳呈现。
04、刚体创建功能模块
刚体创建功能模块提供了对刚体模型的高效管理和编辑功能。用户可以在该模块中查看数据(欧拉角)、添加、修改和删除刚体模型,进行刚体参数调整。这样,用户可以一键选中轻松创建自定义刚体。
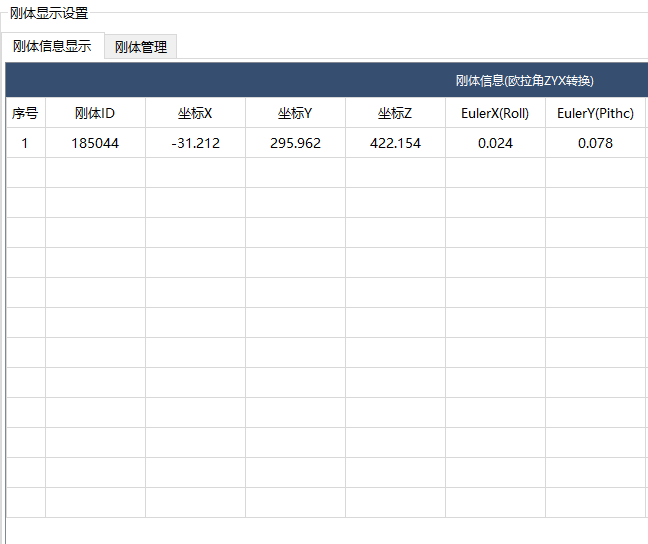
刚体信息列表
05、校准数据管理功能模块
校准数据管理功能模块在系统中具有核心地位。该模块只需一次扫描便能有效地保存相关数据校准结果,免去了用户反复扫描的繁琐,便捷了后续使用流程。无论应用场景如何变化,都能轻松满足需求,实现了数据的高效共享和流通。这一功能的优化提升了整体效率,同时也增强了系统的兼容性和扩展性。
光惯混合动作捕捉系统打破了现有技术的限制,为多个行业和领域的应用打开了新的可能性。更为突出的是,其以用户友好的设计理念为不同层次的用户提供了便捷的操作体验,这不仅促进了空间定位方面的技术进展,也无疑将推动整个社会在此领域的更广泛发展。这一创新的技术方案体现了对实用性和普适性的深刻洞见,有望引领新一轮的行业变革。



![[SQLITE_ERROR] SQL error or missing database (near “=“: syntax error)【已解决】](https://img-blog.csdnimg.cn/efa74a403eb34398894eece1b6868560.png)

![java八股文面试[JVM]——JVM调优](https://img-blog.csdnimg.cn/dec8b0b9a1ea4bd9963eb7fe69ff39f7.png)