小猫爪:嵌入式小知识16-XCP协议简介
- 0 目录
- 1 前言
- 2 XCP协议简介
- 2.1 各种包
- 2.1 CMD
- 2.2 RES
- 2.3 ERR
- 2.4 EV
- 2.5 SERV
- 2.6 DAQ
- 2.7 STIM
- 2.8 总结
- 2.2 错误处理
- 2.2.1 Time-out Error Handling
- 2.2.2 Error Code Error Handling
- END
0 目录
- 小猫爪:嵌入式小知识15-XCP基础简介
- 小猫爪:嵌入式小知识16-XCP协议简介
- 小猫爪:嵌入式小知识17-XCP on CAN简介
1 前言
上一节介绍了一下XCP的相关基础,为我们后续学习打下了坚实的基础,接下来就开始进行枯燥乏味的协议介绍。参考资料:XCP协议规范2003。
2 XCP协议简介
2.1 各种包
在XCP基础简介文章中,提到了XCP协议包分为CTO和DTO,然后又细分为CMD, RES, ERR, EV, SERV, DAQ, STIM,在上篇文章中已经对XCP协议包的格式进行了简单说明,XCP依靠PID来进行区分协议包类型,具体PID划分如下:

接下来来看看每一种包的形式和作用。
注:下面的表中出现的MAX_CTO和MAX_DTO,分别表示CTO包和DTO包的最大数据字节长度。
2.1 CMD

CMD就是XCP的各种命令,PID的范围是0xC0~0xFF,具体的相关命令有:
-
Standard commands (STD)

-
Calibration commands (CAL)
.
-
Page switching commands (PAG)

-
Data Acquisition and Stimulation commands (DAQ)

-
Non-volatile memory programming commands (PGM)

每一种命令的作用这里就不一一细说了,具体请参考XCP标准协议的Part2,《ASAM_XCP_Part2_Protocol-Layer-Specification_V1.0》。
2.2 RES

RES是CMD的正响应,PID固定为0xFF,具体RES的响应内容根据CMD而变化,具体请参考XCP标准协议的Part2,《ASAM_XCP_Part2_Protocol-Layer-Specification_V1.0》。
2.3 ERR

ERR是CMD的负响应,PID固定为0xFE,Error Code如下所示:

2.4 EV

EV就是从节点在连接之后,向主节点发送一些异步事件通知,PID固定为0xFD,Event Code如下:

2.5 SERV

SERV就是从节点在连接之后,向主节点发送一些服务请求,PID固定为0xFC,Service Request Code如下:

2.6 DAQ

DAQ就是从节点给主节点传输数据包,其中PID范围为0x00~0xFB,在上一节中提到过,DAQ的PID包含了绝对或相对ODT编号。
2.7 STIM

DAQ就是主节点给从节点传输数据包,其中PID范围为0x00~0xBF,在上一节中提到过,STIM的PID包含了绝对或相对ODT编号。
2.8 总结
所有的PID看下来后,这里就可以总结一下XCP标定的原理过程了。一般在主节点发起连接CMD并且连接成功后,主节点就可以发送各种花里胡哨的命令进行花里胡哨的操作,配置ODT,配置DAQ_list,如果激活了DAQ_list,那么从节点就会愉快的给你定期发送DAQ进行数据测量,当然主节点也可以周期发送读取数据CMD读取数据进行数据测量,然后还可以发送标定命令修改被标定数据值,慢慢的校准慢慢的标定直到被测量数据值满足期望值,然后马上保存被标定数据值,随后根据需求整理打包成各种PAR数据,然后再用XCP的PGM类命令将PAR下载到ECU目标FLASH区域中完成最终标定。
2.2 错误处理
再来看看XCP的错误处理方式。首先来看看在错误处理上的一些小点。
-
Error
在XCP中定义的错误有两种,第一种就是主节点错误的发送相关命令,从节点发送负响应,这种错误被称为Error Code Error;还有一种就是在主节点发送命令后,从节点未在规定时间内给予正负响应,这种错误被称为Time-out Error。 -
Pre-action和Action
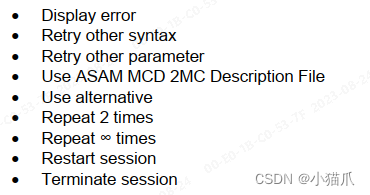
当发生错误时,主节点就不能再发送各种花里胡哨的操作了,这个时候主节点只能进行一些特别的操作,这些特别的操作叫做 Pre-action,具体有:
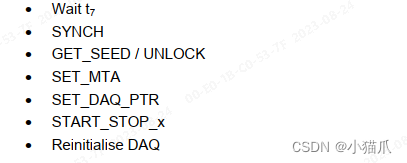
当 Pre-action做完,发现没问题后,这个时候主节点就可以再做另外一些特殊的操作,这些特别的操作叫做Action,具体有:
-
Error Severity
在上面介绍各种包的时候,发现ERR和EV这两种包比别的包多了一个属性severity,它的值范围是S0~S3,这个玩意其实是XCP给ERR和EV的严重程度排了级,如下:

这个东西有啥用呢,就是为了告诉主节点,糟糕糟糕OMG,魔法怎么失灵啦,别折腾了,这个玩意你搞不定的,快快死心吧。
介绍完错误处理相关的点后,就来说说XCP的错误处理流程吧!!!XCP的错误处理的核心其实核心就是“再来一次”,多试两次就成功啦。
2.2.1 Time-out Error Handling
关于Time-out Error的处理呢,就是使用上面的Pre-action和Action,多试几次就好啦,如果好不了的话,主节点可以采取一些必要手段,比如重启从节点。在标准通信模式下的流程如下:

从图中可以看出,首先Master发送了一个Request K, Slave正常回复Response K,然后Master发送了一个Request K+1,结果Slave的回复突然超时了,这个时候Master检测到Time-out Error后首先进行了一个Pre-action操作,就是发送了一个SYNCH命令,随后就再次尝试发送Request K,这个时候,哎,Slave又回复正常了,问题成功消失。
在块传输模式和交互模式下的处理流程也差不多,这里就不做介绍了,感兴趣的可以去参考XCP标准协议的Part2,《ASAM_XCP_Part2_Protocol-Layer-Specification_V1.0》。
2.2.2 Error Code Error Handling
对于Error Code Error 的处理,那更是把“再来一次”的核心体现的淋漓尽致,这里就不多介绍了,XCP协议规范里面列举了在不同的CMD下回复的不同的Error Code它所建议的操作,这里拿一小部分示例看一下:

太随意了,真的太随意了,这里就不做介绍了,感兴趣的可以去参考XCP标准协议的Part2,《ASAM_XCP_Part2_Protocol-Layer-Specification_V1.0》。
好了,关于XCP的协议介绍,就到这里,祝大家码运滚滚。