文章目录
- 前言
- PATH_REUSE_DECIDER功能简介
- PATH_REUSE_DECIDER相关配置
- PATH_REUSE_DECIDER总体流程
- PATH_REUSE_DECIDER相关子函数
- IsCollisionFree
- TrimHistoryPath
- IsIgnoredBlockingObstacle和GetBlockingObstacleS
- Else
- 参考
前言
在Apollo星火计划学习笔记——Apollo路径规划算法原理与实践与【Apollo学习笔记】——Planning模块讲到……Stage::Process的PlanOnReferenceLine函数会依次调用task_list中的TASK,本文将会继续以LaneFollow为例依次介绍其中的TASK部分究竟做了哪些工作。由于个人能力所限,文章可能有纰漏的地方,还请批评斧正。
在modules/planning/conf/scenario/lane_follow_config.pb.txt配置文件中,我们可以看到LaneFollow所需要执行的所有task。
stage_config: {
stage_type: LANE_FOLLOW_DEFAULT_STAGE
enabled: true
task_type: LANE_CHANGE_DECIDER
task_type: PATH_REUSE_DECIDER
task_type: PATH_LANE_BORROW_DECIDER
task_type: PATH_BOUNDS_DECIDER
task_type: PIECEWISE_JERK_PATH_OPTIMIZER
task_type: PATH_ASSESSMENT_DECIDER
task_type: PATH_DECIDER
task_type: RULE_BASED_STOP_DECIDER
task_type: SPEED_BOUNDS_PRIORI_DECIDER
task_type: SPEED_HEURISTIC_OPTIMIZER
task_type: SPEED_DECIDER
task_type: SPEED_BOUNDS_FINAL_DECIDER
task_type: PIECEWISE_JERK_SPEED_OPTIMIZER
# task_type: PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER
task_type: RSS_DECIDER
本文将继续介绍LaneFollow的第二个TASK——PATH_REUSE_DECIDER
PATH_REUSE_DECIDER功能简介

主要功能:检查路径是否可重用,提高帧间平顺性。
主要逻辑:主要判断是否可以重用上一帧规划的路径。若上一帧的路径未与障碍物发生碰撞,则可以重用,提高稳定性,节省计算量。若上一帧的规划出的路径发生碰撞,则重新规划路径。
PATH_REUSE_DECIDER相关配置
PATH_REUSE_DECIDER的相关配置集中在以下两个文件:modules/planning/conf/planning_config.pb.txt和modules/planning/conf/scenario/lane_follow_config.pb.txt
// modules/planning/conf/planning_config.pb.txt
default_task_config: {
task_type: PATH_REUSE_DECIDER
path_reuse_decider_config {
reuse_path: false
}
}
// modules/planning/conf/scenario/lane_follow_config.pb.txt
task_config: {
task_type: PATH_REUSE_DECIDER
path_reuse_decider_config {
reuse_path: false
}
}
可以看到,默认情况不启用PATH_REUSE,改为true后启用。
PATH_REUSE_DECIDER总体流程
接着来看一看PATH_REUSE_DECIDER的代码逻辑。代码路径:modules/planning/tasks/deciders/path_reuse_decider/path_reuse_decider.cc
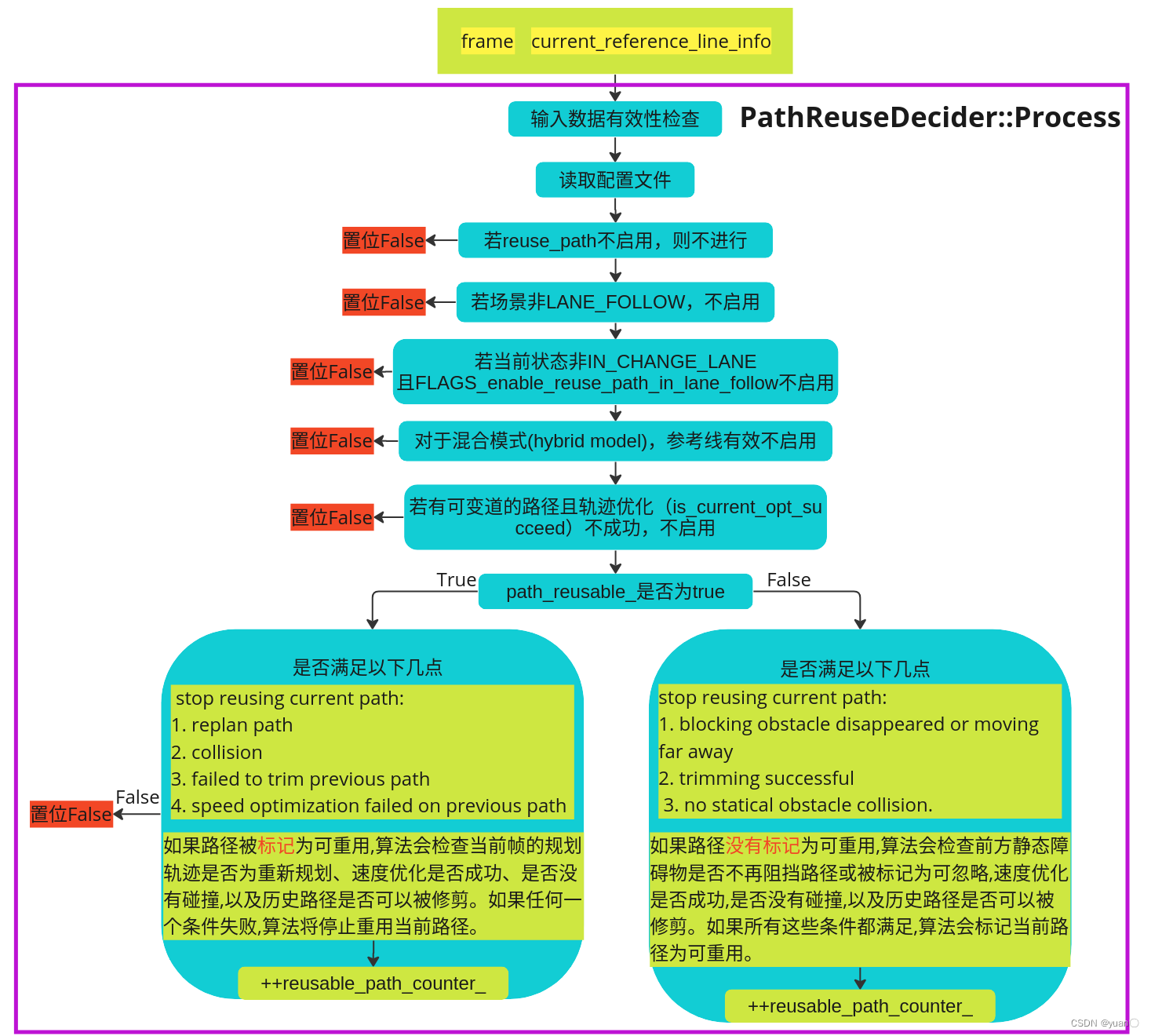
主函数逻辑集中在Process函数中:
Status PathReuseDecider::Process(Frame* const frame,
ReferenceLineInfo* const reference_line_info) {
// Sanity checks.
CHECK_NOTNULL(frame);
CHECK_NOTNULL(reference_line_info);
if (!Decider::config_.path_reuse_decider_config().reuse_path()) {
ADEBUG << "skipping reusing path: conf";
reference_line_info->set_path_reusable(false);
return Status::OK();
}
// skip path reuse if not in LANE_FOLLOW_SCENARIO
const auto scenario_type = injector_->planning_context()
->planning_status()
.scenario()
.scenario_type();
if (scenario_type != ScenarioType::LANE_FOLLOW) {
ADEBUG << "skipping reusing path: not in LANE_FOLLOW scenario";
reference_line_info->set_path_reusable(false);
return Status::OK();
}
// active path reuse during change_lane only
auto* lane_change_status = injector_->planning_context()
->mutable_planning_status()
->mutable_change_lane();
ADEBUG << "lane change status: " << lane_change_status->ShortDebugString();
// skip path reuse if not in_change_lane
if (lane_change_status->status() != ChangeLaneStatus::IN_CHANGE_LANE &&
!FLAGS_enable_reuse_path_in_lane_follow) {
ADEBUG << "skipping reusing path: not in lane_change";
reference_line_info->set_path_reusable(false);
return Status::OK();
}
// for hybrid model: skip reuse path for valid path reference
const bool valid_model_output =
reference_line_info->path_data().is_valid_path_reference();
if (valid_model_output) {
ADEBUG << "skipping reusing path: path reference is valid";
reference_line_info->set_path_reusable(false);
return Status::OK();
}
/*count total_path_ when in_change_lane && reuse_path*/
++total_path_counter_;
/*reuse path when in non_change_lane reference line or
optimization succeeded in change_lane reference line
*/
bool is_change_lane_path = reference_line_info->IsChangeLanePath();
if (is_change_lane_path && !lane_change_status->is_current_opt_succeed()) {
reference_line_info->set_path_reusable(false);
ADEBUG << "reusable_path_counter[" << reusable_path_counter_
<< "] total_path_counter[" << total_path_counter_ << "]";
ADEBUG << "Stop reusing path when optimization failed on change lane path";
return Status::OK();
}
// stop reusing current path:
// 1. replan path
// 2. collision
// 3. failed to trim previous path
// 4. speed optimization failed on previous path
bool speed_optimization_successful = false;
const auto& history_frame = injector_->frame_history()->Latest();
if (history_frame) {
const auto history_trajectory_type =
history_frame->reference_line_info().front().trajectory_type();
speed_optimization_successful =
(history_trajectory_type != ADCTrajectory::SPEED_FALLBACK);
}
// const auto history_trajectory_type = injector_->FrameHistory()s
// ->Latest()
// ->reference_line_info()
// .front()
// .trajectory_type();
if (path_reusable_) {
if (!frame->current_frame_planned_trajectory().is_replan() &&
speed_optimization_successful && IsCollisionFree(reference_line_info) &&
TrimHistoryPath(frame, reference_line_info)) {
ADEBUG << "reuse path";
++reusable_path_counter_; // count reusable path
} else {
// stop reuse path
ADEBUG << "stop reuse path";
path_reusable_ = false;
}
} else {
// F -> T
auto* mutable_path_decider_status = injector_->planning_context()
->mutable_planning_status()
->mutable_path_decider();
static constexpr int kWaitCycle = -2; // wait 2 cycle
const int front_static_obstacle_cycle_counter =
mutable_path_decider_status->front_static_obstacle_cycle_counter();
const bool ignore_blocking_obstacle =
IsIgnoredBlockingObstacle(reference_line_info);
ADEBUG << "counter[" << front_static_obstacle_cycle_counter
<< "] IsIgnoredBlockingObstacle[" << ignore_blocking_obstacle << "]";
// stop reusing current path:
// 1. blocking obstacle disappeared or moving far away
// 2. trimming successful
// 3. no statical obstacle collision.
if ((front_static_obstacle_cycle_counter <= kWaitCycle ||
ignore_blocking_obstacle) &&
speed_optimization_successful && IsCollisionFree(reference_line_info) &&
TrimHistoryPath(frame, reference_line_info)) {
// enable reuse path
ADEBUG << "reuse path: front_blocking_obstacle ignorable";
path_reusable_ = true;
++reusable_path_counter_;
}
}
reference_line_info->set_path_reusable(path_reusable_);
ADEBUG << "reusable_path_counter[" << reusable_path_counter_
<< "] total_path_counter[" << total_path_counter_ << "]";
return Status::OK();
}
PATH_REUSE_DECIDER相关子函数
IsCollisionFree

bool PathReuseDecider::IsCollisionFree(
ReferenceLineInfo* const reference_line_info) {
const ReferenceLine& reference_line = reference_line_info->reference_line();
static constexpr double kMinObstacleArea = 1e-4;
const double kSBuffer = 0.5;
static constexpr int kNumExtraTailBoundPoint = 21;
static constexpr double kPathBoundsDeciderResolution = 0.5;
// current vehicle sl position
common::SLPoint adc_position_sl;
GetADCSLPoint(reference_line, &adc_position_sl);
// current obstacles
std::vector<Polygon2d> obstacle_polygons;
for (auto obstacle :
reference_line_info->path_decision()->obstacles().Items()) {
// filtered all non-static objects and virtual obstacle
if (!obstacle->IsStatic() || obstacle->IsVirtual()) {
if (!obstacle->IsStatic()) {
ADEBUG << "SPOT a dynamic obstacle";
}
if (obstacle->IsVirtual()) {
ADEBUG << "SPOT a virtual obstacle";
}
continue;
}
const auto& obstacle_sl = obstacle->PerceptionSLBoundary();
// Ignore obstacles behind ADC
if ((obstacle_sl.end_s() < adc_position_sl.s() - kSBuffer) ||
// Ignore too small obstacles.
(obstacle_sl.end_s() - obstacle_sl.start_s()) *
(obstacle_sl.end_l() - obstacle_sl.start_l()) <
kMinObstacleArea) {
continue;
}
obstacle_polygons.push_back(
Polygon2d({Vec2d(obstacle_sl.start_s(), obstacle_sl.start_l()),
Vec2d(obstacle_sl.start_s(), obstacle_sl.end_l()),
Vec2d(obstacle_sl.end_s(), obstacle_sl.end_l()),
Vec2d(obstacle_sl.end_s(), obstacle_sl.start_l())}));
}
if (obstacle_polygons.empty()) {
return true;
}
const auto& history_frame = injector_->frame_history()->Latest();
if (!history_frame) {
return false;
}
const DiscretizedPath& history_path =
history_frame->current_frame_planned_path();
// path end point
// 将上一段轨迹的终点投影到SL坐标系下
common::SLPoint path_end_position_sl;
common::math::Vec2d path_end_position = {history_path.back().x(),
history_path.back().y()};
reference_line.XYToSL(path_end_position, &path_end_position_sl);
for (size_t i = 0; i < history_path.size(); ++i) {
common::SLPoint path_position_sl;
common::math::Vec2d path_position = {history_path[i].x(),
history_path[i].y()};
reference_line.XYToSL(path_position, &path_position_sl);
if (path_end_position_sl.s() - path_position_sl.s() <=
kNumExtraTailBoundPoint * kPathBoundsDeciderResolution) {
break;
}
if (path_position_sl.s() < adc_position_sl.s() - kSBuffer) {
continue;
}
const auto& vehicle_box =
common::VehicleConfigHelper::Instance()->GetBoundingBox(
history_path[i]);
std::vector<Vec2d> ABCDpoints = vehicle_box.GetAllCorners();
for (const auto& corner_point : ABCDpoints) {
// For each corner point, project it onto reference_line
common::SLPoint curr_point_sl;
if (!reference_line.XYToSL(corner_point, &curr_point_sl)) {
AERROR << "Failed to get the projection from point onto "
"reference_line";
return false;
}
auto curr_point = Vec2d(curr_point_sl.s(), curr_point_sl.l());
// Check if it's in any polygon of other static obstacles.
for (const auto& obstacle_polygon : obstacle_polygons) {
if (obstacle_polygon.IsPointIn(curr_point)) {
// for debug
ADEBUG << "s distance to end point:" << path_end_position_sl.s();
ADEBUG << "s distance to end point:" << path_position_sl.s();
ADEBUG << "[" << i << "]"
<< ", history_path[i].x(): " << std::setprecision(9)
<< history_path[i].x() << ", history_path[i].y()"
<< std::setprecision(9) << history_path[i].y();
ADEBUG << "collision:" << curr_point.x() << ", " << curr_point.y();
Vec2d xy_point;
reference_line.SLToXY(curr_point_sl, &xy_point);
ADEBUG << "collision:" << xy_point.x() << ", " << xy_point.y();
return false;
}
}
}
}
return true;
}
TrimHistoryPath

bool PathReuseDecider::TrimHistoryPath(
Frame* frame, ReferenceLineInfo* const reference_line_info) {
const ReferenceLine& reference_line = reference_line_info->reference_line();
const auto& history_frame = injector_->frame_history()->Latest();
if (!history_frame) {
ADEBUG << "no history frame";
return false;
}
// 找到上一帧轨迹的起始点
const common::TrajectoryPoint history_planning_start_point =
history_frame->PlanningStartPoint();
common::PathPoint history_init_path_point =
history_planning_start_point.path_point();
ADEBUG << "history_init_path_point x:[" << std::setprecision(9)
<< history_init_path_point.x() << "], y["
<< history_init_path_point.y() << "], s: ["
<< history_init_path_point.s() << "]";
// 当前周期规划的起点
const common::TrajectoryPoint planning_start_point =
frame->PlanningStartPoint();
common::PathPoint init_path_point = planning_start_point.path_point();
ADEBUG << "init_path_point x:[" << std::setprecision(9) << init_path_point.x()
<< "], y[" << init_path_point.y() << "], s: [" << init_path_point.s()
<< "]";
const DiscretizedPath& history_path =
history_frame->current_frame_planned_path();
DiscretizedPath trimmed_path;
// 获取自车的SL坐标
common::SLPoint adc_position_sl; // current vehicle sl position
GetADCSLPoint(reference_line, &adc_position_sl);
ADEBUG << "adc_position_sl.s(): " << adc_position_sl.s();
size_t path_start_index = 0;
for (size_t i = 0; i < history_path.size(); ++i) {
// find previous init point
// 找到上周期轨迹规划的起点索引
if (history_path[i].s() > 0) {
path_start_index = i;
break;
}
}
ADEBUG << "!!!path_start_index[" << path_start_index << "]";
// get current s=0
common::SLPoint init_path_position_sl;
// 当前轨迹的起点
reference_line.XYToSL(init_path_point, &init_path_position_sl);
bool inserted_init_point = false;
//匹配当前规划起点位置,裁剪该点之后的轨迹
for (size_t i = path_start_index; i < history_path.size(); ++i) {
common::SLPoint path_position_sl;
common::math::Vec2d path_position = {history_path[i].x(),
history_path[i].y()};
reference_line.XYToSL(path_position, &path_position_sl);
double updated_s = path_position_sl.s() - init_path_position_sl.s();
// insert init point
if (updated_s > 0 && !inserted_init_point) {
trimmed_path.emplace_back(init_path_point);
trimmed_path.back().set_s(0);
inserted_init_point = true;
}
trimmed_path.emplace_back(history_path[i]);
// if (i < 50) {
// ADEBUG << "path_point:[" << i << "]" << updated_s;
// path_position_sl.s();
// ADEBUG << std::setprecision(9) << "path_point:[" << i << "]"
// << "x: [" << history_path[i].x() << "], y:[" <<
// history_path[i].y()
// << "]. s[" << history_path[i].s() << "]";
// }
trimmed_path.back().set_s(updated_s);
}
ADEBUG << "trimmed_path[0]: " << trimmed_path.front().s();
ADEBUG << "[END] trimmed_path.size(): " << trimmed_path.size();
// 检查裁剪出来的轨迹是不是过短
if (!NotShortPath(trimmed_path)) {
ADEBUG << "short path: " << trimmed_path.size();
return false;
}
// set path
auto path_data = reference_line_info->mutable_path_data();
ADEBUG << "previous path_data size: " << history_path.size();
path_data->SetReferenceLine(&reference_line);
ADEBUG << "previous path_data size: " << path_data->discretized_path().size();
path_data->SetDiscretizedPath(DiscretizedPath(std::move(trimmed_path)));
ADEBUG << "not short path: " << trimmed_path.size();
ADEBUG << "current path size: "
<< reference_line_info->path_data().discretized_path().size();
return true;
}
IsIgnoredBlockingObstacle和GetBlockingObstacleS
前方堵塞的障碍物是否离开足够远的距离
bool PathReuseDecider::IsIgnoredBlockingObstacle(
ReferenceLineInfo* const reference_line_info) {
const ReferenceLine& reference_line = reference_line_info->reference_line();
static constexpr double kSDistBuffer = 30.0; // meter
static constexpr int kTimeBuffer = 3; // second
// vehicle speed
double adc_speed = injector_->vehicle_state()->linear_velocity();
double final_s_buffer = std::max(kSDistBuffer, kTimeBuffer * adc_speed);
// current vehicle s position
common::SLPoint adc_position_sl;
GetADCSLPoint(reference_line, &adc_position_sl);
// blocking obstacle start s
double blocking_obstacle_start_s;
if (GetBlockingObstacleS(reference_line_info, &blocking_obstacle_start_s) &&
// distance to blocking obstacle
(blocking_obstacle_start_s - adc_position_sl.s() > final_s_buffer)) {
ADEBUG << "blocking obstacle distance: "
<< blocking_obstacle_start_s - adc_position_sl.s();
return true;
} else {
return false;
}
}
bool PathReuseDecider::GetBlockingObstacleS(
ReferenceLineInfo* const reference_line_info, double* blocking_obstacle_s) {
auto* mutable_path_decider_status = injector_->planning_context()
->mutable_planning_status()
->mutable_path_decider();
// get blocking obstacle ID (front_static_obstacle_id)
const std::string& blocking_obstacle_ID =
mutable_path_decider_status->front_static_obstacle_id();
const IndexedList<std::string, Obstacle>& indexed_obstacles =
reference_line_info->path_decision()->obstacles();
const auto* blocking_obstacle = indexed_obstacles.Find(blocking_obstacle_ID);
if (blocking_obstacle == nullptr) {
return false;
}
const auto& obstacle_sl = blocking_obstacle->PerceptionSLBoundary();
*blocking_obstacle_s = obstacle_sl.start_s();
ADEBUG << "blocking obstacle distance: " << obstacle_sl.start_s();
return true;
}
Else
在启用reuse之后,之后的task会有这样一段代码,用以跳过以下流程,沿用之前的path
// skip path_lane_borrow_decider if reused path
if (FLAGS_enable_skip_path_tasks && reference_line_info->path_reusable()) {
// for debug
AINFO << "skip due to reusing path";
return Status::OK();
}
参考
[1] Apollo Planning决策规划代码详细解析 (7): PathReuseDecider
[2] Apollo6.0 PathReuseDecider流程与代码解析





![[ MySQL ] — 如何理解索引以及索引的操作](https://img-blog.csdnimg.cn/3042414e51e04808ad2eaf51b467db0e.png)