摘要: 本贴从零开始学习正演的数值模拟方法.
1. 偏微分基础
引例: 物体从一维坐标的原点开始移动, 在
t
t
t 时刻, 它在坐标轴的位置由函数
s
(
t
)
s(t)
s(t) 确定, 则速度为位置变化量与时间的比值:
v
(
t
)
=
d
s
(
t
)
d
t
=
lim
Δ
t
→
0
s
(
t
+
Δ
t
)
−
s
(
t
)
Δ
t
(1)
v(t) = \frac{\mathrm{d} s(t)}{\mathrm{d} t} = \lim_{\Delta t \to 0} \frac{s(t + \Delta t) - s(t)}{\Delta t} \tag{1}
v(t)=dtds(t)=Δt→0limΔts(t+Δt)−s(t)(1)
加速度为速度变化量与时间的比值:
a
(
t
)
=
d
v
(
t
)
d
t
=
lim
Δ
t
→
0
v
(
t
)
−
v
(
t
−
Δ
t
)
Δ
t
=
lim
Δ
t
→
0
s
(
t
+
Δ
t
)
−
2
s
(
t
)
+
s
(
t
−
Δ
t
)
Δ
t
2
(2)
a(t) = \frac{\mathrm{d} v(t)}{\mathrm{d} t} = \lim_{\Delta t \to 0} \frac{v(t) - v(t - \Delta t)}{\Delta t} = \lim_{\Delta t \to 0} \frac{s(t + \Delta t) - 2 s(t) + s(t - \Delta t)}{\Delta t^2} \tag{2}
a(t)=dtdv(t)=Δt→0limΔtv(t)−v(t−Δt)=Δt→0limΔt2s(t+Δt)−2s(t)+s(t−Δt)(2)
推广 1: 给定一个单变量函数
y
=
f
(
x
)
(3)
y = f(x) \tag{3}
y=f(x)(3)
其一阶导数记为
y
′
=
d
f
(
x
)
d
x
(4)
y' = \frac{\mathrm{d} f(x)}{\mathrm{d} x} \tag{4}
y′=dxdf(x)(4)
二阶导数记为
y
′
′
=
d
2
f
(
x
)
d
x
2
(5)
y'' = \frac{\mathrm{d}^2 f(x)}{\mathrm{d} x^2} \tag{5}
y′′=dx2d2f(x)(5)
推广 2: 给定一个二变量函数
z
=
f
(
x
,
y
)
(6)
z = f(x, y) \tag{6}
z=f(x,y)(6)
其针对
x
x
x 偏导的为
∂
z
∂
x
=
lim
Δ
x
→
0
f
(
x
+
Δ
x
,
y
)
−
f
(
x
,
y
)
Δ
x
(7)
\frac{\partial z}{\partial x} = \lim_{\Delta x \to 0} \frac{f(x + \Delta x, y) - f(x, y)}{\Delta x} \tag{7}
∂x∂z=Δx→0limΔxf(x+Δx,y)−f(x,y)(7)
即
x
x
x 发生了变化, 而
y
y
y 并没变化. 二阶偏导为
∂
2
z
∂
x
2
=
lim
Δ
x
→
0
f
(
x
+
Δ
x
,
y
)
−
2
f
(
x
,
y
)
+
f
(
x
−
Δ
x
,
y
)
Δ
x
2
(8)
\frac{\partial^2 z}{\partial x^2} = \lim_{\Delta x \to 0} \frac{f(x + \Delta x, y) - 2 f(x, y) + f(x - \Delta x, y)}{\Delta x^2} \tag{8}
∂x2∂2z=Δx→0limΔx2f(x+Δx,y)−2f(x,y)+f(x−Δx,y)(8)
另外有:
∂
2
z
∂
x
∂
y
=
lim
Δ
x
→
0
,
Δ
y
→
0
f
(
x
+
Δ
x
,
y
+
Δ
y
)
−
f
(
x
,
y
+
Δ
y
)
−
f
(
x
+
Δ
x
,
y
)
+
f
(
x
,
y
)
Δ
x
Δ
y
(9)
\frac{\partial^2 z}{\partial x \partial y} = \lim_{\Delta x \to 0, \Delta y \to 0} \frac{f(x + \Delta x, y + \Delta y) - f(x, y + \Delta y) - f(x + \Delta x, y) + f(x, y)}{\Delta x \Delta y} \tag{9}
∂x∂y∂2z=Δx→0,Δy→0limΔxΔyf(x+Δx,y+Δy)−f(x,y+Δy)−f(x+Δx,y)+f(x,y)(9)
∂
2
z
∂
y
∂
x
=
∂
2
z
∂
x
∂
y
(10)
\frac{\partial^2 z}{\partial y \partial x} = \frac{\partial^2 z}{\partial x \partial y} \tag{10}
∂y∂x∂2z=∂x∂y∂2z(10)
在进行数值模拟的时候, 不可能取
Δ
x
→
0
\Delta x \to 0
Δx→0, 因此 (8) 式简化为
∂
2
z
∂
x
2
≈
f
(
x
+
Δ
x
,
y
)
−
2
f
(
x
,
y
)
+
f
(
x
−
Δ
x
,
y
)
Δ
x
2
(11)
\frac{\partial^2 z}{\partial x^2} \approx \frac{f(x + \Delta x, y) - 2 f(x, y) + f(x - \Delta x, y)}{\Delta x^2} \tag{11}
∂x2∂2z≈Δx2f(x+Δx,y)−2f(x,y)+f(x−Δx,y)(11)
其中
Δ
x
\Delta x
Δx 越小越准确, 但涉及的计算量越大, 我们只能取一个折中.
注 1: 为统一起见, 即使一元函数, 以后也常使用 ∂ \partial ∂ 而不是 d \mathrm{d} d.
2. 波动方程
2.1 弦振动 (横波) 方程
参见全波形反演的深度学习方法: 第 2 章 正演, 根据牛顿第二定律
F
=
m
a
(12)
F = ma \tag{12}
F=ma(12)
弦振动方程为
∂
2
u
(
x
,
t
)
∂
t
2
=
c
2
∂
2
u
(
x
,
t
)
∂
x
2
+
f
(
x
,
t
)
(13)
\frac{\partial^2 u(x, t)}{\partial t^2} = c^2 \frac{\partial^2 u(x, t)}{\partial x^2} + f(x, t) \tag{13}
∂t2∂2u(x,t)=c2∂x2∂2u(x,t)+f(x,t)(13)
其中
c
2
=
T
/
ρ
c^2 = T / \rho
c2=T/ρ,
f
(
x
,
t
)
=
F
(
x
,
t
)
/
ρ
f(x, t) = F(x, t) / \rho
f(x,t)=F(x,t)/ρ, 左式的物理意义是瞬时加速度
a
a
a, 右式第一项的物理意义是 单位质量所受的力
F
F
F,
c
c
c 的物理意义是速度.
进一步忽略重力
F
(
x
,
t
)
F(x, t)
F(x,t) 的作用, 可以推出一维齐次波动方程的解:
∂
2
u
(
x
,
t
)
∂
x
2
=
1
c
2
∂
2
u
(
x
,
t
)
∂
t
2
(14)
\frac{\partial^2 u(x, t)}{\partial x^2} = \frac{1}{c^2} \frac{\partial^2 u(x, t)}{\partial t^2} \tag{14}
∂x2∂2u(x,t)=c21∂t2∂2u(x,t)(14)
2.2 声波 (纵波) 方程
声波仅有纵波. 考虑二维的情况, 它满足
1
v
2
∂
2
U
∂
t
2
=
∂
2
U
∂
x
2
+
∂
2
U
∂
z
2
(15)
\frac{1}{v^2} \frac{\partial^2 U}{\partial t^2} = \frac{\partial^2 U}{\partial x^2} + \frac{\partial^2 U}{\partial z^2} \tag{15}
v21∂t2∂2U=∂x2∂2U+∂z2∂2U(15)
其中
U
U
U 指压力.
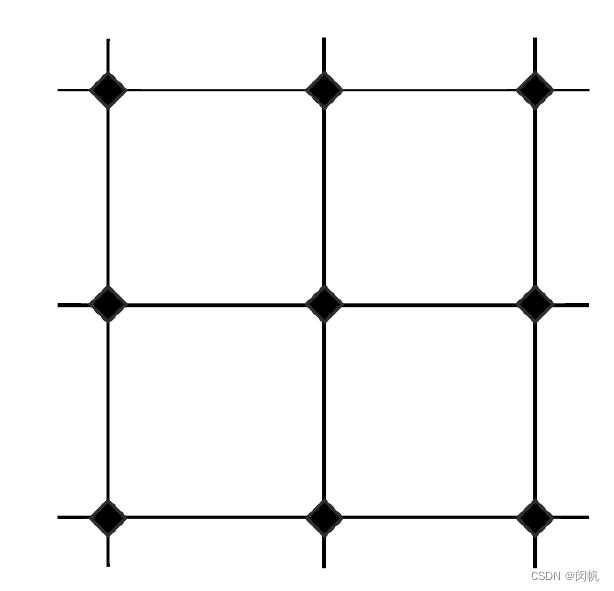
为了便于数值模拟, 将平面进行离散化, 仅考虑某些网格交叉点, 质量、压力等仅存在于这些点 (称为质点, 不知是否专业). 这样, 我们只考察第
i
i
i 行第
j
j
j 列的质点在时间
k
k
k 的压力
U
i
,
j
k
(16)
U_{i, j}^k \tag{16}
Ui,jk(16)
将 (11) 式按照变量名改造后代入 (15) 式可得
1
v
2
U
i
,
j
k
+
1
−
2
U
i
,
j
k
+
U
i
,
j
k
−
1
Δ
t
2
=
U
i
+
1
,
j
k
−
2
U
i
,
j
k
+
U
i
−
1
,
j
k
Δ
x
2
+
U
i
,
j
+
1
k
−
2
U
i
,
j
k
+
U
i
,
j
−
1
k
Δ
y
2
(17)
\frac{1}{v^2} \frac{U_{i, j}^{k + 1} - 2 U_{i, j}^{k} + U_{i, j}^{k - 1}}{\Delta t^2} = \frac{U_{i + 1, j}^k - 2 U_{i, j}^{k} + U_{i - 1, j}^k}{\Delta x^2} + \frac{U_{i, j + 1}^k - 2 U_{i, j}^{k} + U_{i, j - 1}^k}{\Delta y^2} \tag{17}
v21Δt2Ui,jk+1−2Ui,jk+Ui,jk−1=Δx2Ui+1,jk−2Ui,jk+Ui−1,jk+Δy2Ui,j+1k−2Ui,jk+Ui,j−1k(17)
其中
k
+
1
k + 1
k+1 表示下一个时间点,
i
+
1
i + 1
i+1 表示下一个质点.